基于三维动态模型的施工控制方法与流程
- 国知局
- 2024-12-06 12:24:12
本发明涉及施工控制,具体涉及基于三维动态模型的施工控制方法。
背景技术:
1、电力设施施工中有许多部件需要埋入地下,以确保电力系统的安全性、可靠性和美观性,例如用于输送高压电力的电缆、用于电力系统控制和通信的光纤,以及接地装置、电缆沟与管道、地下变压器基础、接线盒和分线盒等,正确安装和维护这些地下部件对于电力系统的稳定运行至关重要。然而,现有技术中,电力设施的施工现场数据通常依赖手动测量和静态数据分析,这种方法存在延迟,无法提供实时反馈,使得施工进度和质量控制难以实时调整,可能导致施工质量问题和工程延误;并且,挖方和填方施工中,模型可能无法及时更新,导致施工计划与实际情况不符,影响施工进度和质量控制。
技术实现思路
1、本申请通过提供了基于三维动态模型的施工控制方法,旨在解决现有技术在施工管理中通常采用人工测量和静态数据分析,难以实时监控施工过程中的变化,导致施工质量不稳定的技术问题。
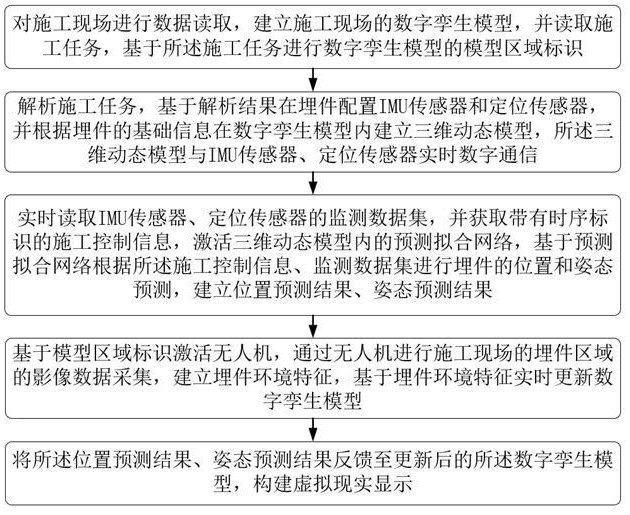
2、本申请公开的基于三维动态模型的施工控制方法,所述方法包括:对施工现场进行数据读取,建立施工现场的数字孪生模型,并读取施工任务,基于所述施工任务进行数字孪生模型的模型区域标识;解析施工任务,基于解析结果在埋件配置imu传感器和定位传感器,并根据埋件的基础信息在数字孪生模型内建立三维动态模型,所述三维动态模型与imu传感器、定位传感器实时数字通信;实时读取imu传感器、定位传感器的监测数据集,并获取带有时序标识的施工控制信息,激活三维动态模型内的预测拟合网络,基于预测拟合网络根据所述施工控制信息、监测数据集进行埋件的位置和姿态预测,建立位置预测结果、姿态预测结果;基于模型区域标识激活无人机,通过无人机进行施工现场的埋件区域进行影像数据采集,建立埋件环境特征,基于埋件环境特征实时更新数字孪生模型;将所述位置预测结果、姿态预测结果反馈至更新后的所述数字孪生模型,构建虚拟现实显示。
3、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
4、通过对施工现场进行数据读取和建立数字孪生模型,实现施工现场状态的实时数字化,imu传感器和定位传感器的数据实时传输到三维动态模型中,确保了施工数据的即时更新,提高了数据的实时性和准确性,使施工管理能够实时掌握现场情况,从而提高了施工控制的效率和决策的及时性;通过激活预测拟合网络,根据imu传感器和定位传感器的监测数据进行埋件的位置和姿态预测,结合了实时数据和预测模型,实现了对施工状态的动态预测,使得施工过程中的位置和姿态可以提前预测,从而减少了因误差导致的问题,优化了施工过程;通过无人机对施工现场进行影像数据采集,建立埋件环境特征,并基于这些特征实时更新数字孪生模型,确保了模型能够及时反映现场环境的变化,改进了环境变化的监测能力,确保数字孪生模型与实际施工环境的一致性,使得施工管理能够快速响应环境变化;将位置预测结果和姿态预测结果反馈至更新后的数字孪生模型,并构建虚拟现实显示,通过虚拟现实技术,提供了一个直观的施工进度和状态展示平台,强化了对施工状态的可视化管理,提高了施工管理的便利性和决策效率。
5、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:1.基于三维动态模型的施工控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的基于三维动态模型的施工控制方法,其特征在于,所述基于预测拟合网络根据所述施工控制信息、监测数据集进行埋件的位置和姿态预测,建立位置预测结果、姿态预测结果,还包括:
3.如权利要求2所述的基于三维动态模型的施工控制方法,其特征在于,构建虚拟现实显示之后,还包括:
4.如权利要求3所述的基于三维动态模型的施工控制方法,其特征在于,所述根据观测均值、观测协方差、状态预测结果和协方差预测结果进行卡尔曼增益和状态更新,还包括:
5.如权利要求4所述的基于三维动态模型的施工控制方法,其特征在于,所述方法还包括:
6.如权利要求1所述的基于三维动态模型的施工控制方法,其特征在于,所述通过无人机进行施工现场的埋件区域进行影像数据采集,建立埋件环境特征,基于埋件环境特征实时更新数字孪生模型,还包括:
7.如权利要求6所述的基于三维动态模型的施工控制方法,其特征在于,所述方法还包括:
8.如权利要求1所述的基于三维动态模型的施工控制方法,其特征在于,所述方法还包括:
技术总结本发明提供了基于三维动态模型的施工控制方法,涉及施工控制技术领域,包括:对施工现场进行数据读取,建立数字孪生模型,并读取施工任务,进行模型区域标识;解析施工任务,在埋件配置IMU传感器和定位传感器,建立三维动态模型;实时读取监测数据集,并获取施工控制信息,激活预测拟合网络,进行埋件的位置和姿态预测,建立位置预测结果、姿态预测结果;激活无人机进行影像数据采集,建立埋件环境特征,实时更新数字孪生模型;构建虚拟现实显示。本发明解决了现有技术在施工管理中通常采用人工测量和静态数据分析,难以实时监控施工过程中的变化,导致施工质量不稳定的技术问题。技术研发人员:卢红平,卢彦宇,文海波,杨俊,柴丽娜,肖坡,王文星,余晋生,马少仕,常文斌,王立东,冯李军,任国卉,赵璐,杨慧蓉,张真如,孙凯,张浩,裴红兰,张川,侯云超,姚俊峰,肖春,肖旭,张丽敏,张艳菲,丁建学,孟庆霖受保护的技术使用者:国网山西省电力公司运城供电公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/341178.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表