一种采用高效淤泥搅吸结构的清淤机器人的制作方法
- 国知局
- 2024-12-06 12:29:04
本发明属于管道污垢清洁,具体涉及一种采用高效淤泥搅吸结构的清淤机器人。
背景技术:
1、随着城市的发展,路面的杂物越来越多,当雨量过大时,杂物会随着雨水进入下水管道,造成堵塞,由于污水中含有各种各样的杂物,现有的清淤装置在使用时,经常会将清淤装置的进污口堵塞,缠绕在清淤装置的电机轴上,缩短清淤装置的使用寿命和排污效率。虽然现有技术存在一些用于清淤装置的过滤网,但是由于进污口存在较大的负压吸附力,杂物容易堆积在清淤装置的进污口处无法正常脱落,严重影响装置的正常工作。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种采用高效淤泥搅吸结构的清淤机器人,可以在进污口被淤泥堵塞时,及时对杂物进行清理,以提高管道的排污效率。
2、为达到上述目的,本发明提供如下技术方案:
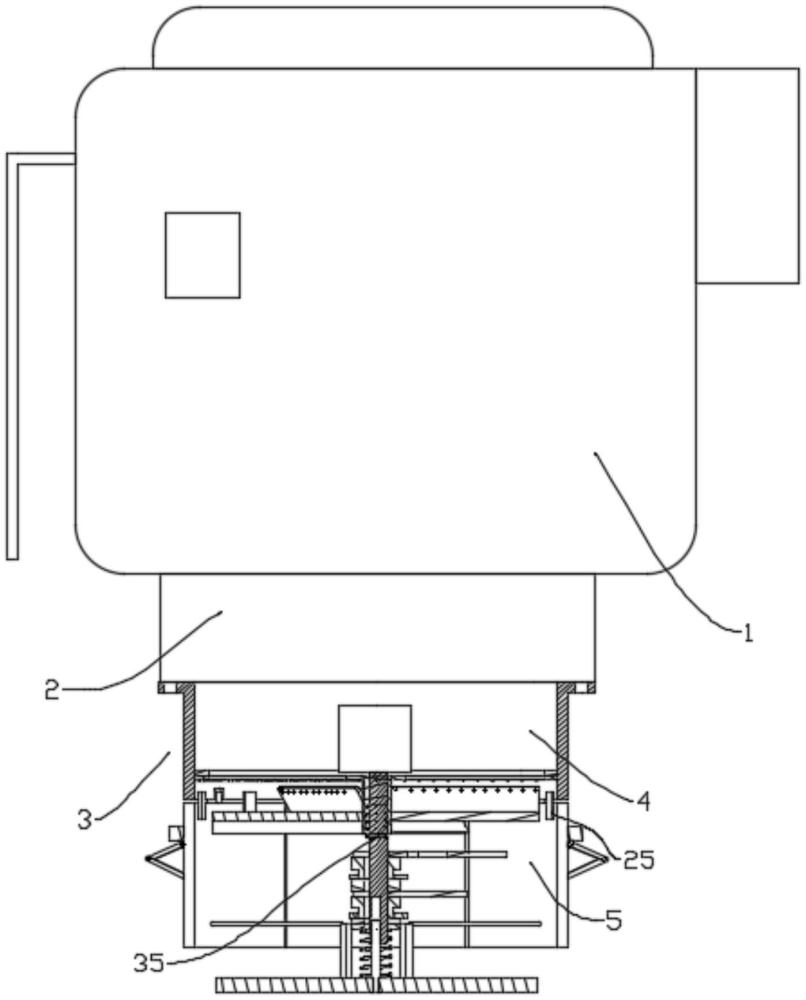
3、本发明一种采用高效淤泥搅吸结构的清淤机器人,所述机器人本体包括进污口,所述进污口连接有进污管道,所述进污管道包括连接段、与所述连接段同轴连接的膨胀段,所述膨胀段包括若干弧形壳体,所述弧形壳体沿连接段的周向均匀分布,所述弧形壳体的上端与连接段铰接;所述连接段内安装有过滤网,所述过滤网的中心转动连接有输出轴,所述输出轴朝向膨胀段延伸一端滑动连接有中心轴,所述中心轴的外端连接至防触支架,所述防触支架通过第一弹簧连接至压板,所述第一弹簧和压板套设在输出轴的外侧,所述中心轴的外侧固定有压力传感器,所述压板的上表面与压力传感器抵接;所述防触支架上固定有销轴,所述销轴上转动连接有l型扰动杆,所述l型扰动杆的直角处开设有与销轴转动配合的通孔,所述l型扰动杆的一端通过弹性拉绳连接至弧形壳体,所述弧形壳体连接有偏转控制组件,所述压力传感器通过控制器与偏转控制组件连接。
4、进一步,所述偏转控制组件包括第一铰接座、液压缸、第二铰接座、压紧环、第一支座、第一连杆、第二连杆和第二支座,所述第一铰接座固定在连接段的外侧,所述第一铰接座连接至液压缸的一端,所述液压缸的另一端连接至第二铰接座,所述第二铰接座固定在压紧环的上侧,所述压紧环同轴设置于膨胀段的外侧,所述压紧环的下侧固定由第一支座,所述第一支座于第一连杆的一端铰接,所述第一连杆的另一端通过第二连杆于第二支座铰接,所述第二支座固定在弧形壳体的外侧。
5、进一步,所述连接段的内侧固定有用于所述弧形壳体限位的限位板。
6、进一步,所述压紧环的下侧内环位置形成有斜槽,当压紧环将弧形壳体压紧时,所述斜槽于弧形壳体的外表面接触。
7、进一步,所述防触支架包括沿着中心轴的外侧均匀分布的多根支杆,所述支杆的一端于中心轴固定连接,所述支杆的另一端沿膨胀段的径向延伸,所述销轴固定在相邻两根支杆之间。
8、进一步,所述过滤网上向下延伸有轴杆,所述轴杆上固定有固定刀片,所述固定刀片套设在输出轴的外侧,所述输出轴的外侧同时套装有转动刀片,所述转动刀片与固定刀片沿输出轴的轴向交错设置。
9、进一步,所述固定刀片的内侧开设有若干锯齿,所述转动刀片呈s形,所述转动刀片的背侧开设有弧形缺口,各转动刀片在转轴的周向相互错开。
10、进一步,所述输出轴的外侧同时连接有刮渣组件,所述刮渣组件包括套筒、均匀间隔设置在套筒外侧的若干叶片,所述套筒安装在输出轴的外侧,所述叶片的上侧与过滤网的下表面接触。
11、进一步,所述输出轴上形成有台阶,所述台阶与套筒之间安装有第二弹簧。
12、本发明的有益效果在于:
13、本发明一种采用高效淤泥搅吸结构的清淤机器人,通过设置膨胀段,当遇到杂质堆积在进污管道的开口处时,杂质的压力能够作用于压力传感器,压力传感器将信号传递至控制器,控制器向偏转控制组件发出信号,偏转控制组件从而可以驱动弧形壳体向外偏转,使得堆积后的杂质失去束缚后向周向散开,避免对管道造成堵塞。
14、本发明装置中,偏转控制组件驱动弧形壳体偏转时,弧形壳体可以通过弹性拉绳拉动l型扰动杆的上端,使得l型扰动杆偏转,l型扰动杆的下端从而可以作用于杂质,因此,采用本发明装置可以在进污口堵塞时,通过l型扰动杆的扰动作用,及时对杂物进行清理,以提高管道的排污效率。
15、本发明装置采用防触支架,防触支架的下端伸出进污管道的开口,从而避免进污管道直接与大型的杂质或者排污池的底部接触,以可以起到预警的作用。同时通过压力传感器作为堵塞检测的原件,可以实现自动化的清理,突破了现场恶劣环境的限制。
16、本发明的其他优点、目标和特征将在随后的说明书中进行阐述,并且在某种程度上对本领域技术人员而言是显而易见的,或者本领域技术人员可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:1.一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:包括机器人本体(1),所述机器人本体(1)包括进污口(2),所述进污口(2)连接有进污管道(3),所述进污管道(3)包括连接段(4)、与所述连接段(4)同轴连接的膨胀段(5),所述膨胀段(5)包括若干弧形壳体(6),所述弧形壳体(6)沿连接段(4)的周向均匀分布,所述弧形壳体(6)的上端与连接段(4)铰接;所述连接段(4)内安装有过滤网(7),所述过滤网(7)的中心转动连接有输出轴(8),所述输出轴(8)朝向膨胀段(5)延伸一端滑动连接有中心轴(9),所述中心轴(9)的外端连接至防触支架(10),所述防触支架(10)通过第一弹簧(11)连接至压板(12),所述第一弹簧(11)和压板(12)套设在输出轴(8)的外侧,所述中心轴(9)的外侧固定有压力传感器(13),所述压板(12)的上表面与压力传感器(13)抵接;所述防触支架(10)上固定有销轴(14),所述销轴(14)上转动连接有l型扰动杆(15),所述l型扰动杆(15)的直角处开设有与销轴(14)转动配合的通孔(16),所述l型扰动杆(15)的一端通过弹性拉绳(17)连接至弧形壳体(6),所述弧形壳体(6)连接有偏转控制组件,所述压力传感器(13)通过控制器与偏转控制组件连接。
2.根据权利要求1所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述偏转控制组件包括第一铰接座(18)、液压缸(19)、第二铰接座(20)、压紧环(21)、第一支座(37)、第一连杆(22)、第二连杆(23)和第二支座(24),所述第一铰接座(18)固定在连接段(4)的外侧,所述第一铰接座(18)连接至液压缸(19)的一端,所述液压缸(19)的另一端连接至第二铰接座(20),所述第二铰接座(20)固定在压紧环(21)的上侧,所述压紧环(21)同轴设置于膨胀段(5)的外侧,所述压紧环(21)的下侧固定由第一支座(37),所述第一支座(37)于第一连杆(22)的一端铰接,所述第一连杆(22)的另一端通过第二连杆(23)于第二支座(24)铰接,所述第二支座(24)固定在弧形壳体(6)的外侧。
3.根据权利要求2所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述连接段(4)的内侧固定有用于所述弧形壳体(6)限位的限位板(25)。
4.根据权利要求3所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述压紧环(21)的下侧内环位置形成有斜槽(26),当压紧环(21)将弧形壳体(6)压紧时,所述斜槽(26)于弧形壳体(6)的外表面接触。
5.根据权利要求1所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述防触支架(10)包括沿着中心轴(9)的外侧均匀分布的多根支杆(27),所述支杆(27)的一端于中心轴(9)固定连接,所述支杆(27)的另一端沿膨胀段(5)的径向延伸,所述销轴(14)固定在相邻两根支杆(27)之间。
6.根据权利要求1-5任一项所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述过滤网(7)上向下延伸有轴杆(28),所述轴杆(28)上固定有固定刀片(29),所述固定刀片(29)套设在输出轴(8)的外侧,所述输出轴(8)的外侧同时套装有转动刀片(30),所述转动刀片(30)与固定刀片(29)沿输出轴(8)的轴向交错设置。
7.根据权利要求6所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述固定刀片(29)的内侧开设有若干锯齿(31),所述转动刀片(30)呈s形,所述转动刀片(30)的背侧开设有弧形缺口(32),各转动刀片(30)在转轴的周向相互错开。
8.根据权利要求7所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述输出轴(8)的外侧同时连接有刮渣组件,所述刮渣组件包括套筒(33)、均匀间隔设置在套筒(33)外侧的若干叶片(34),所述套筒(33)安装在输出轴(8)的外侧,所述叶片(34)的上侧与过滤网(7)的下表面接触。
9.根据权利要求8所述的一种采用高效淤泥搅吸结构的清淤机器人,其特征在于:所述输出轴(8)上形成有台阶(35),所述台阶(35)与套筒(33)之间安装有第二弹簧(36)。
技术总结本发明公开了一种采用高效淤泥搅吸结构的清淤机器人,属于管道污垢清洁技术领域,包括机器人本体以及连接进污口的进污管道,进污管道包括连接段、与连接段同轴连接的膨胀段,膨胀段包括若干弧形壳体,连接段内安装有过滤网,过滤网的中心转动连接有输出轴,第一弹簧和压板套设在输出轴的外侧,中心轴的外侧固定有压力传感器,压板的上表面与压力传感器抵接;防触支架上固定有销轴,销轴上转动连接有L型扰动杆,L型扰动杆的直角处开设有与销轴转动配合的通孔,L型扰动杆的一端通过弹性拉绳连接至弧形壳体,弧形壳体连接有偏转控制组件。采用本发明装置可以在进污口堵塞时,及时对杂物进行清理,以提高管道的排污效率。技术研发人员:任鹏飞,张艳茹,赵超亚,凡国旗受保护的技术使用者:陕西青山青淼机器人科技有限公司技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/341655.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表