抓剪扭一体化果蔬采摘执行器
- 国知局
- 2024-12-26 16:46:16
本技术涉及果蔬采摘,尤其涉及一种果蔬采摘执行器。
背景技术:
1、果蔬种类繁多,是人们日常生活不可或缺的食物。各类果蔬,如苹果、西红柿等在成熟后需要人工采摘下来贮存或运输。人工采摘果蔬劳动强度大,可能需要人长时间弯腰或长时间登高作业,可能出现摔伤、扭伤、过劳伤、割伤等问题,对健康和安全有一定风险,且采摘效率较低。
2、为此,采用视觉识别技术的果蔬采摘器近年来得到了不断地研究和发展,其基本原理是通过视觉识别技术确定果蔬的位置信息和深度信息,由果蔬采摘(执行)器完成采摘动作。
3、现有的果蔬采摘器的采摘动作,或者是先剪切果柄后抓取果实,或者是先抓取果实后剪切果柄,也有只抓取不剪切、在抓取然后依靠拉力将果蔬果实拉下来的技术。不剪切的话,拉动果蔬果实时整个植株摇动剧烈,可能把其他成熟的果实摇落,颗粒不受控摇落坠地后容易损坏,且不易一一捡拾。剪切的话,也存在未能完全剪断果柄的情况,果柄的皮未剪断时在取回果实时,也会摇动植株导致成熟果实被摇落。
4、现有的果蔬采摘器动作未能抓取和剪切二合一(因而采摘效率有待提高),也没有在抓取和剪切动作后采用后续提高果实成功由植株上分离下来的分离率的动作。
技术实现思路
1、本实用新型的目的在于提供一种抓剪扭一体化果蔬采摘执行器,将抓取和剪切两个动作结合为二合一的动作,提高采摘效率,并通过转扭动作提高果实成功由植株上分离下来的分离率。
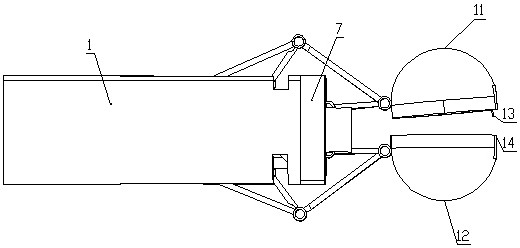
2、为实现上述目的,本实用新型的抓剪扭一体化果蔬采摘执行器包括筒形壳体,筒形壳体的轴向方向即朝向待采摘果蔬的方向,以待采摘果蔬的方向为前向;筒形壳体后端封闭且前端设有开口;
3、筒形壳体于中后部设有轴向运动机构,筒形壳体于中前部设有与轴向运动机构相匹配的周向运动机构;轴向运动机构连接有可跟随周向运动机构旋转的后上铰接座和后下铰接座,周向运动机构连接有中上铰接座和中下铰接座;
4、筒形壳体的前端开口处设有作为筒形壳体端盖的前轴承,前轴承的外圈固定有轴承壳,轴承壳后端敞口,轴承壳与筒形壳体固定连接, 前轴承前侧中上部设有上支撑铰接座,前轴承前侧中下部设有下支撑铰接座;
5、后上铰接座、中上铰接座和上支撑铰接座之间具有上连杆铰接机构,上连杆铰接机构的前端铰接有上夹爪;
6、后下铰接座、中下铰接座和下支撑铰接座之间具有下连杆铰接机构,下连杆铰接机构的前端铰接有下夹爪;上夹爪和下夹爪均呈中空球缺形且二者的槽口上下相对;
7、上夹爪的前端部向下连接有用于切断果柄的刀片,下夹爪的前端部上表面对应于刀片开设有用于容纳刀片并对果柄未断部分到直角弯折作用以及增加果柄未断部分所受张力的刀槽;
8、轴向运动机构用于通过上连杆铰接机构和下上连杆铰接机构驱动上夹爪和下夹爪合拢或者打开;周向运动机构用于在周向运动机构的驱动下带动上夹爪和下夹爪做旋转运动以扭断切断动作(切断动作即剪切动作)后果柄可能存在的仍然相连的部分;
9、上夹爪和下夹爪的合拢动作即为抓取果蔬的抓取动作,刀片插入刀槽的动作即为切断动作,抓取动作和切断动作为二合一的同步动作;上夹爪和下夹爪所做旋转运动即为扭断动作。
10、上连杆铰接机构包括铰接在后上铰接座上的后上连杆,后上连杆的前端通过中上节点铰接有中上连杆和前上连杆,中上连杆的另一端向下与中上铰接座相铰接,
11、前上连杆向前铰接有前上节点,前上节点向后铰接有上支撑连杆,上支撑连杆向后与上支撑铰接座相铰接;前上连杆通过前上节点铰接所述上支撑连杆以及所述上夹爪的后端底部;
12、下连杆铰接机构包括铰接在后下铰接座上的后下连杆,后下连杆的前端通过中下节点铰接有中下连杆和前下连杆,中下连杆的另一端向上与中下铰接座相铰接,
13、前下连杆向前铰接有前下节点,前下节点向后铰接有下支撑连杆,下支撑连杆向后与下支撑铰接座相铰接;前下连杆通过前下节点铰接所述下支撑连杆以及所述下夹爪的后端底部。
14、筒形壳体的中前部对应于后上连杆和后下连杆开设有上通槽和下通槽,上通槽和下通槽均沿筒形壳体的轴向延伸;
15、上通槽用于提供后上连杆和中上连杆向上伸出筒形壳体并进行轴向前后位移以及周向旋转位移的空间,
16、下通槽用于提供后下连杆和中下连杆向下伸出筒形壳体并进行轴向前后位移以及周向旋转位移的空间。
17、轴向运动机构包括步进电机,步进电机通过联轴器连接有螺杆,步进电机固定于筒形壳体的后端部,螺杆沿筒形壳体的轴向延伸至前轴承处;
18、螺杆中部连接有后轴向定位板,后轴向定位板前方的螺杆上套设有套筒,后轴向定位板用于定位套筒向后位移的极限位置;
19、套筒前方的螺杆上螺接有后齿形螺母,后齿形螺母径向固定连接有前连接板,前连接板与套筒前端通过后轴承相连接并用于带动套筒前后轴向位移;
20、后上铰接座固定在套筒上部,后下铰接座固定在套筒下部;
21、后齿形螺母的前端向前连接有尖端朝前的后齿;
22、筒形壳体内设有用于约束后齿形螺母周向角度并对后齿形螺母起到轴向导向作用的导向约束结构,导向约束结构用于在螺杆旋转时迫使后齿形螺母前进或后退,后齿形螺母在前后移动时带动套筒一同发生前后位移,进而通过上连杆铰接机构和下连杆铰接机构驱动上夹爪和下夹爪合拢或打开。
23、周向运动机构的结构是:
24、前轴承的内圈过盈配合有前套杆,前套杆向前通过安装架安装所述上支撑铰接座和下支撑铰接座;轴承壳前端对应于上支撑铰接座和下支撑铰接座开设有上通孔和下通孔,上通孔和下通孔用于提供上支撑连杆和下支撑连杆的活动空间;
25、上通孔和下通孔之间的轴承壳向前凸起设有中空的支撑槽体,螺杆前端部穿过前套杆伸入支撑槽体并与支撑槽体转动配合,支撑槽体用于支撑螺杆前端部;螺杆与前套杆之间转动配合;
26、前套杆向后安装有尖端朝后的前齿,前齿与后齿相适配,后齿在轴向运动机构的驱动下向前移动并插入后齿与后齿相啮合的过程中驱动后齿发生旋转,后齿通过前套杆、上连杆铰接机构和下连杆铰接机构带动上夹爪和下夹爪一体旋转形成扭断动作;
27、前套杆周向表面沿周向均匀间隔连接有多个复位拉簧,各复位拉簧均沿径向延伸并与筒形壳体的内壁相连接;复位拉簧用于在轴向运动机构带动后齿后退离开前齿时驱动前套杆、前齿、上夹爪和下夹爪转动复位。
28、本实用新型具有如下的优点:
29、果柄切断处前后两侧由刀槽的槽壁支撑,提高了果柄的一次切断成功率。刀槽由于对果柄未断部分起到直角弯折作用,因而增强了切断动作的切断效果。果柄未断部分在刀片的压力下深入刀槽,增强了果柄未断部分所受张力,更有利于扭断,提高后续扭断动作的扭断成功率。
30、以往抓取动作和切断动作是两个动作,本实用新型的结构保证了抓取动作和切断动作为二合一的同步动作,提高了果蔬采摘效率。本实用新型的结构使得切断动作中,如果果柄未在切割之初(一次切断作用)就断掉,切割处将90度弯折并被压入刀槽中,承受相比没有刀槽的切断过程大得多的切断力,增强了切割作用,提高了切断动作的切断率。切断动作后随之就进行扭断动作,此时未断部分还被刀片压在刀槽深处,未断部分承受的张力本来就很强(绷得很紧),此时的扭断动作将大幅增加果柄未断部分的受力,相比扭动时果柄未受张力或未明显受到张力作用的情形,大幅增加了扭断概率。
31、本实用新型以纯机械结构,在一个动作装置(步进电机)的一次驱动下完成抓取动作、切断动作和扭断动作,每一次采摘动作都包含抓取动作、切断动作和扭断动作,切断动作有刀槽配合,扭断动作有由刀槽和刀片对果柄形成的强张力(果柄未断部分被刀片强制压入刀槽时被弯折且更加远离植株本体,因而具有较强张力)的配合,一次采摘动作执行后果蔬的果柄没有完全与植株本体分离的概率相比以往得到了显著降低,避免了一次采摘不成功带来的后续麻烦,提高了采摘效果和采摘效率以及采摘成功率。
32、上连杆铰接机构和下连杆铰接机构结构简单,成本较低,动作执行可靠,能够在轴向运动机构的驱动下可靠地带动上夹爪和下夹爪进行合拢或打开的动作。筒形壳体设计巧妙,满足轴向运动机构和周向运动机构的安装需求和动作需求。
33、轴向运动机构和周向运动机构的结构能够可靠地完成轴向驱动与周向驱动功能,除步进电机外是纯机械结构,动作可靠,能够长期免维护运行。
34、本实用新型的使用方法步骤简便,可手持操作,可借助机械臂作业,方便灵活。扭断动作不需要单独控制进行,步进电机只需要一次旋转即可完成全部切断动作和扭断动作,控制简单,方便作业。
35、由于切断动作具有一次切断作用和二次切断作用两次切断作用,切断成功率相较以往显著提高。采用本实用新型,执行完扭断动作后果柄仍然未断的概率极低,与以往相比大幅降低了果柄未完全断开增加的后续处理工作量。
本文地址:https://www.jishuxx.com/zhuanli/20241216/351333.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表