异地起降无人机的控制方法与流程
- 国知局
- 2025-01-10 13:13:13
本发明涉及异地起降无人机,尤其涉及异地起降无人机的控制方法。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶的飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
2、现有技术中,在无人机时,由于无人机受到续航的影响,进而在无人机飞行中途时续航较低,需要无人机进行返航,由于需要控制无人机原路返航,从而导致无人机续航不能支撑回到降落点,从而导致无人机在空中炸机,故而无人机不能在异地进行起降。
3、因此我们对此做出改进,提出异地起降无人机的控制方法。
技术实现思路
1、本发明要解决的技术问题是:在无人机续航较低时,从而使航点探测模块介入,且使航点与降落点直线计算模块计算无人机到降落点的直线距离与无人机原路返航直线距离,并且进行判断,从而选择异地降落、直线进行返航,同时在异地降落时,经过落点探测模块对异地降落点进行判断,从而选择地势进行降落,且在降落之后经过太阳能电池模块对无人机进行充电,从而支撑无人机在异地进行起飞,且使无人机在异地飞到降落点。
2、技术方案
3、为了实现上述发明目的,本发明提供了异地起降无人机的控制方法,包括以下步骤:
4、s1、操控者经过操控终端控制无人机,并且启动起飞模块,进而使无人机起飞,同时飞行控制模块实时控制无人机飞行姿态;
5、s2、无人机到达远程航点,且使无人机续航受限,从而使航点探测模块进行位置探测,进而使航点与降落点直线计算模块介入,且对直线返航与原路返航进行计算,若直线返航小于原路返航,并且无人机续航支撑无人机直线返航,从而使返航模块介入,且使无人机进行直线返航;
6、s3、若直线返航与原路返航线路相同,并且无人机续航不支持返航,从而异地准备降落模块介入,且使落点探测模块进行运转,从而使落点拍照单元对落点位置进行拍照,进而使数据传输单元将照片数据传输到大数据分析单元,进而使大数据分析单元进行判断,若降落点地势平坦,且将判断数据传输到数据接收单元,进而使决策单元接收判断数据,从而决策单元对无人机的降落命令,进而使异地降落模块控制无人机进行降落;
7、s4、若降落点地势不平,进而继续航行模块介入,使无人机继续飞行,若剩余电量较多,进而使落点探测模块继续进行落点寻找,若电量剩余不多,进而使异地紧急迫降模块介入,从而使无人机降落在不平整的地面上;
8、s5、在异地降落后,从而使太阳能电池模块介入,且使电池经过光照进行充电,若电量足够返航时,进而使唤醒模块介入,且唤醒无人机,从而使异地起飞模块运转,进而使无人机进行返航,若电量不足,从而电池继续充电。
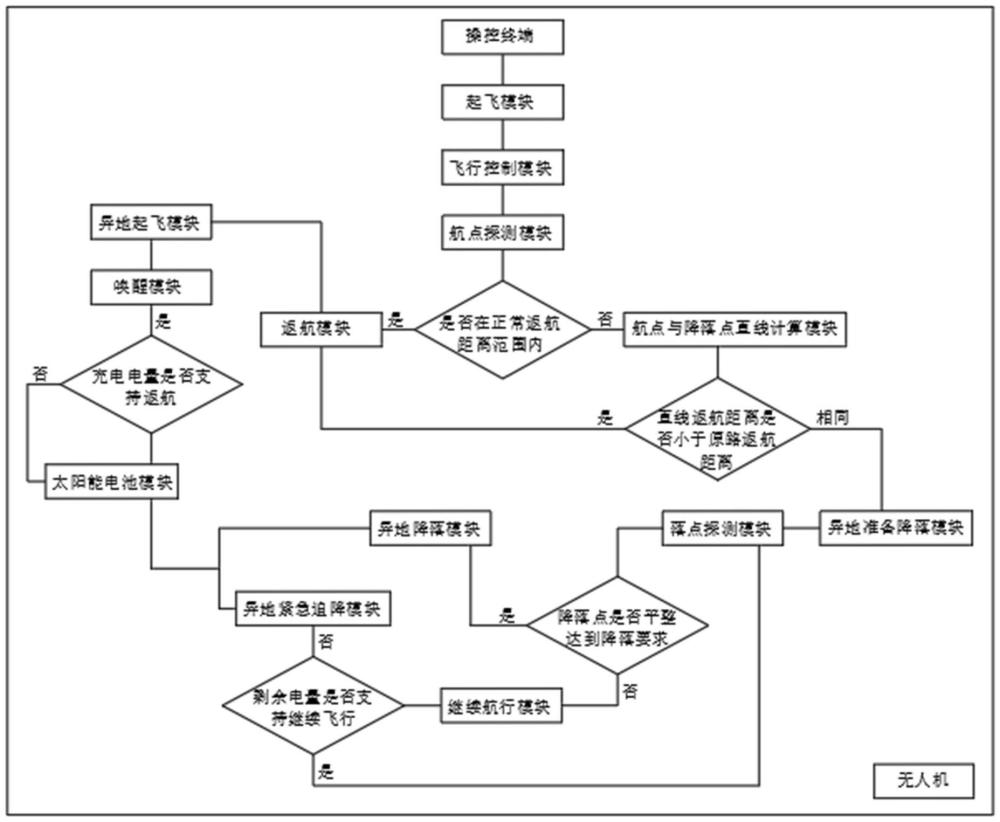
9、优选的,包括操控终端,所述操控终端通过数据传输技术与起飞模块相连,用于操控者控制无人机起飞,所述起飞模块通过数据传输技术与飞行控制模块相连,用于控制无人机在航行过程中的姿态,所述飞行控制模块通过数据传输技术与航点探测模块相连,用于对无人机航行位置点进行探测,所述航点探测模块通过数据传输技术与航点与降落点直线计算模块相连,用于技术无人机与降落点之间的直线距离,所述航点探测模块通过数据传输技术与返航模块相连,用于控制无人机进行返航,所述航点与降落点直线计算模块通过数据传输技术与异地准备降落模块相连,用于无人机异地降落的准备工作,所述异地准备降落模块通过数据传输技术与落点探测模块相连,用于对降落地点进行探测,所述落点探测模块包括落点拍照单元,所述落点拍照单元用于对降落地点机械拍照探测,所述落点拍照单元通过数据传输技术与数据传输单元相连,用于对照片数据进行传输,所述数据传输单元通过数据传输技术与大数据分析单元相连,用于对传输的数据进行分析、且可以分析降落地点的平整度,所述大数据分析单元通过数据传输技术与数据接收单元相连,用于接收分析之后的数据,所述数据接收单元通过数据传输技术与决策单元相连,用于决策单元根据分析的数据进行做出决策。
10、优选的,所述落点探测模块通过数据传输技术与异地降落模块相连,用于将无人机降落在异地,所述落点探测模块通过数据传输技术与继续航行模块相连,用于在异地地形不平达不到降落要求进而使无人机继续飞行。
11、优选的,所述继续航行模块通过数据传输技术与异地紧急迫降模块相连,用于无人机在低续航状态下进行紧急迫降在异地,所述异地紧急迫降模块通过数据传输技术与太阳能电池模块相连,用于在无人机在迫降之后利用阳光进行充电。
12、优选的,所述太阳能电池模块通过数据传输技术与唤醒模块相连,用于在充电之后并且充电电量支撑返航进而进行唤醒无人机,所述唤醒模块通过数据传输技术与异地起飞模块相连,用于无人机在异地进行起飞。
13、优选的,所述异地起飞模块通过数据传输技术与返航模块相连,用于无人机在异地进行返航。
14、优选的,所述航点与降落点直线计算模块通过数据传输技术与返航模块相连,用于无人机直线返航线路小于原路返航线路时进行返航。
15、优选的,所述异地降落模块通过数据传输技术与太阳能电池模块相连,用于无人机降落在地势较平的地方利用阳光进行充电。
16、有益效果
17、本发明所提供的异地起降无人机的控制方法,其有益效果是:
18、通过在无人机续航较低时,从而使航点探测模块介入,且使航点与降落点直线计算模块计算无人机到降落点的直线距离与无人机原路返航直线距离,并且进行判断,从而选择异地降落、直线进行返航,同时在异地降落时,经过落点探测模块对异地降落点进行判断,且使落点探测模块中的落点拍照单元对异地降落点进行拍照,同时大数据分析单元将数据传输单元传输过来的数据进行分析,并且决策单元经过数据接收单元接收分析之后的数据,从而对无人机做出准确的命令,从而选择地势进行降落,且在降落之后经过太阳能电池模块对无人机进行充电,从而支撑无人机在异地进行起飞,且使无人机在异地飞到降落点。
技术特征:1.异地起降无人机的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的异地起降无人机的控制方法,包括操控终端(1),其特征在于,所述操控终端(1)通过数据传输技术与起飞模块(2)相连,用于操控者控制无人机起飞,所述起飞模块(2)通过数据传输技术与飞行控制模块(3)相连,用于控制无人机在航行过程中的姿态,所述飞行控制模块(3)通过数据传输技术与航点探测模块(4)相连,用于对无人机航行位置点进行探测,所述航点探测模块(4)通过数据传输技术与航点与降落点直线计算模块(5)相连,用于技术无人机与降落点之间的直线距离,所述航点探测模块(4)通过数据传输技术与返航模块(6)相连,用于控制无人机进行返航,所述航点与降落点直线计算模块(5)通过数据传输技术与异地准备降落模块(7)相连,用于无人机异地降落的准备工作,所述异地准备降落模块(7)通过数据传输技术与落点探测模块(8)相连,用于对降落地点进行探测,所述落点探测模块(8)包括落点拍照单元(81),所述落点拍照单元(81)用于对降落地点机械拍照探测,所述落点拍照单元(81)通过数据传输技术与数据传输单元(82)相连,用于对照片数据进行传输,所述数据传输单元(82)通过数据传输技术与大数据分析单元(83)相连,用于对传输的数据进行分析、且可以分析降落地点的平整度,所述大数据分析单元(83)通过数据传输技术与数据接收单元(84)相连,用于接收分析之后的数据,所述数据接收单元(84)通过数据传输技术与决策单元(85)相连,用于决策单元(85)根据分析的数据进行做出决策。
3.根据权利要求2所述的异地起降无人机的控制方法,其特征在于,所述落点探测模块(8)通过数据传输技术与异地降落模块(9)相连,用于将无人机降落在异地,所述落点探测模块(8)通过数据传输技术与继续航行模块(10)相连,用于在异地地形不平达不到降落要求进而使无人机继续飞行。
4.根据权利要求2所述的异地起降无人机的控制方法,其特征在于,所述继续航行模块(10)通过数据传输技术与异地紧急迫降模块(11)相连,用于无人机在低续航状态下进行紧急迫降在异地,所述异地紧急迫降模块(11)通过数据传输技术与太阳能电池模块(12)相连,用于在无人机在迫降之后利用阳光进行充电。
5.根据权利要求2所述的异地起降无人机的控制方法,其特征在于,所述太阳能电池模块(12)通过数据传输技术与唤醒模块(13)相连,用于在充电之后并且充电电量支撑返航进而进行唤醒无人机,所述唤醒模块(13)通过数据传输技术与异地起飞模块(14)相连,用于无人机在异地进行起飞。
6.根据权利要求2所述的异地起降无人机的控制方法,其特征在于,所述异地起飞模块(14)通过数据传输技术与返航模块(6)相连,用于无人机在异地进行返航。
7.根据权利要求2所述的异地起降无人机的控制方法,其特征在于,所述航点与降落点直线计算模块(5)通过数据传输技术与返航模块(6)相连,用于无人机直线返航线路小于原路返航线路时进行返航。
8.根据权利要求2所述的异地起降无人机的控制方法,其特征在于,所述异地降落模块(9)通过数据传输技术与太阳能电池模块(12)相连,用于无人机降落在地势较平的地方利用阳光进行充电。
技术总结本发明涉及异地起降无人机技术领域,提出了异地起降无人机的控制方法,包括以下步骤:S1、操控者经过操控终端控制无人机,并且启动起飞模块,进而使无人机起飞,同时飞行控制模块实时控制无人机飞行姿态。在无人机续航较低时,从而使航点探测模块介入,且使航点与降落点直线计算模块计算无人机到降落点的直线距离与无人机原路返航直线距离,并且进行判断,从而选择异地降落、直线进行返航,同时在异地降落时,经过落点探测模块对异地降落点进行判断,从而选择地势进行降落,且在降落之后经过太阳能电池模块对无人机进行充电,从而支撑无人机在异地进行起飞,且使无人机在异地飞到降落点。技术研发人员:李宇程,杨钦,李维康,韦涛,欧发斌,纪硕磊,鹿可可,徐文平,黄志都,陈李寿,江龙剑,卢胜标,朱时阳受保护的技术使用者:广西电网有限责任公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/351691.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表