一种微小型多旋翼无人机集群协同控制系统的制作方法
- 国知局
- 2024-12-26 16:13:47
本发明属于微小型无人机集群协同控制,具体涉及一种微小型多旋翼无人机集群协同控制系统。
背景技术:
1、无人机是指利用无线电遥控设备、自备的程序控制装置或者由机载计算机完全地、间歇地自主操作的不载人飞机。随着无人机功能的不断发展,其无人化、智能化、低成本等优势,使得无人机在多个领域大显身手。同时,无人机的任务也逐渐多样化和复杂化,从低级使用逐步进化为高阶运用,从单体转向多机编队协同任务,愈发体现出其任务完成率较高、任务完成速度较快、信息感知量较大等优势。而对于这些协同任务而言,无人机的自主轨迹规划能力和协同飞行能力是无人机协同控制系统能够完成飞行任务的必要条件。
2、文献(crazyswarm:a large nano-quadcopter swarm[c]//2017ieeeinternational conference on robotics and automation(icra).ieee,2017:3299-3304.)设计的crazyflie四旋翼无人机平台是当今使用较为广泛的一款四旋翼多机协同控制平台。该平台使用尺寸小、重量轻的超轻型四旋翼无人机,使用自主研发的飞控与通信系统,为各类无人机控制实验提供了上位机接口,能够较好满足实验需求。但由于无人机的体积小而引发的动力储备不足、续航时间较短、大机动飞行动作受限、平台延展性不良等问题也对相关实验产生了巨大的限制,导致平台在协同控制上的扩展性较差。
3、文献(fast,autonomous flight in gps-denied and cluttered environments[j].journal of field robotics,2018,35(1):101-120.)设计的fla-quad平台具备丰富的传感器资源和较高的算力,拥有较好的扩展性,同时具有较高的载重能力。但该平台尺寸和质量过大,推重比较低,无法完成大机动飞行任务,室内飞行实验危险系数较高。此外,该平台并未提供可靠的多机通信功能,难以实现稳定的大规模多机协同控制。
4、文献(agilicious:open-source and open-hardware agile quadrotor forvision-based flight[j].science robotics,2022,7(67):eabl6259.)提出的agilicious平台采用了穿越机方案,使用中型尺寸机架并结合自研飞控与四合一电调形成飞塔,以减小空间占用。该平台有着较高的飞行机动能力,其搭载的机载电脑也提供了较高的算力资源,但单机成本过高,不适用于需要大规模部署的协同控制实验,亦无可靠的多机通信功能提供通信保障。
技术实现思路
1、本发明的目的是为解决基于现有平台的控制系统无法提供可靠的多机通信功能以及无法实现稳定的大规模多机协同控制的问题,而提出了一种微小型多旋翼无人机集群协同控制系统。
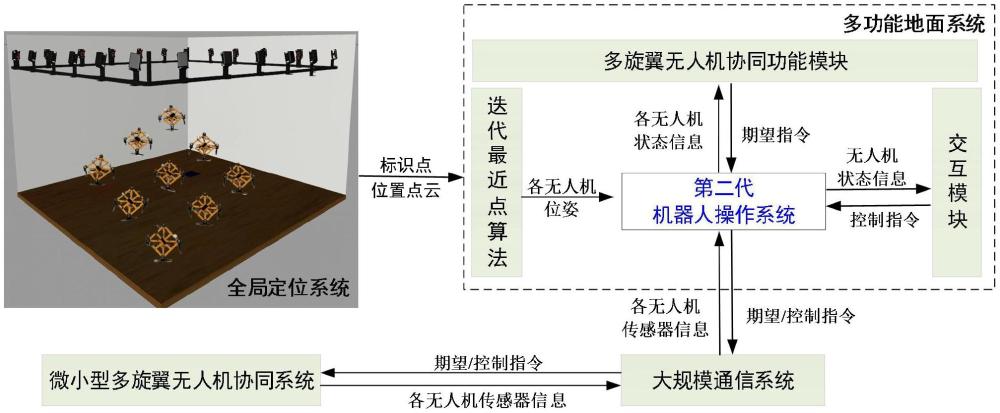
2、本发明为解决上述技术问题所采取的技术方案是:一种微小型多旋翼无人机集群协同控制系统,所述系统包括微小型多旋翼无人机协同模块、通信模块和多功能地面模块,且多功能地面模块内包括第二代机器人操作单元、无人机位姿获取单元、期望指令获取单元和交互单元,其中:
3、所述微小型多旋翼无人机协同模块用于获取各个微小型多旋翼无人机的传感器数据,并将获取的传感器数据发送给通信模块;
4、所述通信模块将传感器数据发送给第二代机器人操作单元;
5、无人机位姿获取单元用于获取各个微小型多旋翼无人机的位姿数据,并将获取的位姿数据发送给第二代机器人操作单元;
6、第二代机器人操作单元将包含无人机传感器和位姿数据的状态数据发送给期望指令获取单元和交互单元;
7、交互单元用于根据接收的无人机状态数据输出控制指令,并将控制指令发送给第二代机器人操作单元;
8、期望指令获取单元用于根据接收的无人机状态数据输出期望指令,并将期望指令发送给第二代机器人操作单元;
9、第二代机器人操作单元将控制指令和期望指令发送给通信模块,通信模块将控制指令和期望指令发送给微小型多旋翼无人机协同模块;
10、微小型多旋翼无人机协同模块用于根据接收的控制指令、期望指令和各微小型多旋翼无人机间的通信关系进行任务规划和轨迹规划。
11、进一步地,所述微小型多旋翼无人机设计了pcb一体式机身,在机身的制备材料中加入了复合pla材料,在电机与传感器之间设置有软性橡胶,电机的驱动系统基于单通道下桥臂设计。
12、进一步地,所述微小型多旋翼无人机上设置有imu、指南针、气压传感器、激光定高传感器和光流传感器。
13、进一步地,所述微小型多旋翼无人机协同模块基于无人机飞控核心进行任务规划和轨迹规划,无人机飞控核心以stm32f405作为处理器。
14、进一步地,所述微小型多旋翼无人机上还设置有存储器,所述存储器包括fm25v01fram存储器和mkdv4gcl sd nand存储器,fm25v01 fram存储器和mkdv4gcl sdnand存储器用于存储无人机飞行参数、飞行日志和自定义脚本文件;
15、无人机飞控核心、存储器和传感器数据采用i2c或spi总线与通信模块进行通信。
16、进一步地,所述微小型多旋翼无人机的电源部分采用多级管理方案,即支持宽压输入,交错分离不同区间的电源域。
17、进一步地,所述通信模块包括天空端、地面端和路由端;
18、天空端用于接收多旋翼无人机的传感器数据,并将传感器数据通过udp广播至指定端口,再经过iot设备完成天空端与地面端的通信;
19、通过地面端将传感器数据发送给第二代机器人操作单元;
20、路由端用于管理多旋翼无人机和多功能地面模块的局域网连接。
21、进一步地,所述无人机位姿获取单元的工作过程为:
22、以任意一架微小型多旋翼无人机为例
23、步骤1、将微小型多旋翼无人机的初始位置记为t0,将微小型多旋翼无人机初始的标识点排列方式记为p={p1,p2,p3,....,pn},其中,p1,p2,p3,....,pn是微小型多旋翼无人机上各标识点的位置,n是标识点个数,采用迭代最近点算法,并结合t0和p确定出微小型多旋翼无人机的初始位姿r0;
24、步骤2、将初始位置的图像作为第一帧图像,则微小型多旋翼无人机运动后,将第二帧图像中标识点排列方式记为q={q1,q2,q3,....,qn},q1,q2,q3,....,qn是微小型多旋翼无人机上各标识点在第二帧图像中的位置,根据p={p1,p2,p3,....,pn}和q={q1,q2,q3,....,qn}计算第二帧图像中的微小型多旋翼无人机相当于第一帧图像中的微小型多旋翼无人机的旋转矩阵r和平移矩阵t;
25、步骤3、根据初始位姿r0、旋转矩阵r和平移矩阵t获得微小型多旋翼无人机在第二帧图像中的位姿。
26、进一步地,所述步骤2的具体过程为:
27、步骤21、建立目标函数其中,||·||是l2范数;
28、步骤22、分别计算p和q的质心:
29、
30、其中,μp是p的质心,μq是q的质心;
31、步骤23、分别计算p中每个元素与质心μp的差,分别计算q中每个元素与质心μq的差:
32、p'={p1-μp,p2-μp,p3-μp,…,pn-μp}={p1',p'2,p'3,…,p'n}
33、q'={q1-μq,q2-μq,q3-μq,…,qn-μq}={q1',q'2,q'3,…,q'n}
34、根据p'和q'对步骤21的目标函数进行简化:
35、
36、定义矩阵u是对w进行奇异值分解得到的左奇异矩阵,v是对w进行奇异值分解得到的右奇异矩阵,λ是由奇异值组成的对角矩阵,上角标t代表矩阵的转置;
37、求得:
38、r*=uvt
39、r*即为计算出的旋转矩阵r,再根据r计算t*:
40、t*=μq-rμp
41、t*即为计算出的平移矩阵t。
42、更进一步地,所述任务规划和轨迹规划描述为:
43、min f(p)
44、
45、其中,f(p)为目标函数,aeq和beq是等式约束,aieq和bieq是不等式约束,p是无人机的运动轨迹。
46、本发明的有益效果是:
47、本发明对多旋翼无人机单体进行了结构和电路设计,提出了小尺寸、低重量、长续航的设计方案,以满足多旋翼无人机协同控制的要求。多功能地面模块用于实现全局的定位/定姿算法,为集中/分布式的任务规划、运动规划和集群控制等任务提供数据接口,同时具备人机交互、虚拟现实交互等功能;分布式协同控制/规划方法则为系统实现的核心,规划方法一般嵌入在期望指令获取模块中,控制方法则可以部署在多旋翼无人机协同模块的飞控软件和多功能地面模块的交互单元中,实现对多旋翼无人机的运动控制。自主设计的大规模自适应通信软件用于无人机集群与通信工作,完成多功能地面模块与多旋翼无人机间的上下行数据交互,传输稳定且延迟短;多旋翼无人机飞控软件实现多旋翼无人机平台软件通信、多传感器融合导航、简单任务执行、高性能位置/姿态控制和数据存储等功能,保证无人机系统能够稳定运行并顺利执行多功能地面模块的指令。
48、本发明设计的微小型多旋翼协同控制系统拥有更好、更稳定的控制性能和更低的成本,且使用更为便利。系统具有丰富的协同控制、导航、规划接口,可利用本发明的系统对部署的协同算法进行快速验证。
本文地址:https://www.jishuxx.com/zhuanli/20241216/348802.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表