突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法与流程
- 国知局
- 2025-01-10 13:17:03
本发明专利涉及智能车轨迹规划,具体而言,涉及突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法。
背景技术:
1、智能车的轨迹规划旨在生成反映行车局部路径与速度的时空轨线,符合车辆内部运动学约束与外部环境避障约束等,并在严格保障上述约束得以满足的前提下尽量使得既定的性能指标得到优化。
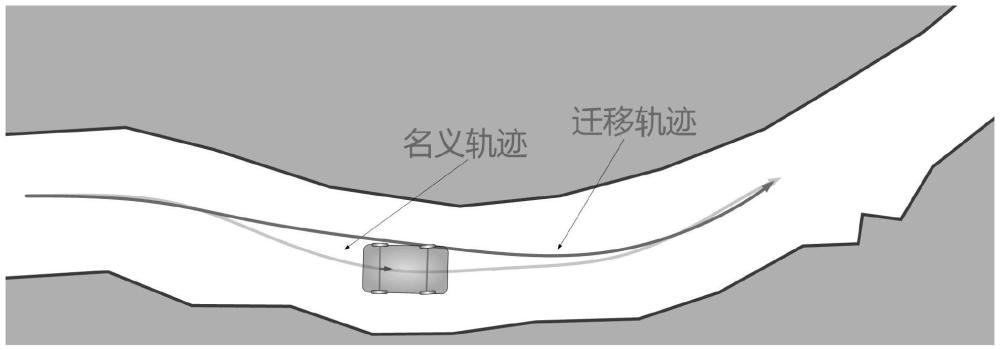
2、轨迹在线重规划是指在智能车行驶的过程中不断地以车辆当前瞬间位置及运动状态为起点,以行车道路前方某一既定预瞄点位(往往是前方10s左右可抵达的位置,一般是80~120m范围内)为局部终点进行高实时性、高性能的轨迹规划。与轨迹规划相比,轨迹重规划强调在名义轨迹规划结果基础上进行二次加工,如图1中的a所示,此前轨迹规划已为智能车生成了一条浅灰色线条作为名义轨迹规划结果,而车辆在真正沿着该轨迹行驶(闭环控制跟踪的执行过程)的过程之中,如图1中的b所示,走在半路上可能突然遭遇了突发的外部重创或故障,导致车辆前轮的转弯响应速度下降到了原来的一半,在线轨迹重规划要求在名义轨迹(图1中的a之中的灰线)基础上充分考虑最新的车辆运动能力,快速生成一条符合最新车辆运动学能力的行车轨迹,这一计算过程称为轨迹在线重规划(参见图1中的b之中的黑虚线)。
3、不难发现,重规划的轨迹与名义轨迹不重叠,且显得转弯更加圆润而平缓,这正是符合故障后车辆运动学规律的一条轨迹。此外,轨迹重规划未必能够衔接至原来的局部预瞄点,因此图1中的b中的灰线与黑虚线末端并未重叠。本发明专注于智能车在线行驶过程中突然故障(车辆运动能力出现变化)条件下的轨迹在线重规划技术。
4、目前在学术界或者产业界,专注于该问题的技术方案主要分为两种:第一种是紧急制动并按照移动窗口方法采样一系列前轮转角角速度容许取值,选择合理的前轮转角以便车辆停止下来。该方法未能充分利用车辆的全部运动学能力,且一旦出现故障则立即刹停车辆会造成交通堵塞、追尾等衍生灾难,导致自动驾驶轨迹规划的容错性与纠错性不强。第二种是在线实施轨迹规划,即从故障发生时刻开始重新开展全新的轨迹规划过程,而该过程往往耗时较长,且此前求解的名义规划结果未得到有效利用,造成了计算资源的无谓浪费。总之,目前市面上针对突发故障条件下的轨迹在线重规划技术研究还不够体系化或者完备。
5、为此,本申请发明人在此提出突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,以解决现有技术中的上述问题。
技术实现思路
1、本发明的目的在于解决上述背景技术中提出的现有技术问题,提供一种在突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法。
2、本发明的上述目的是这样实现的:
3、突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,包括以下步骤:
4、s1、基于灵敏度的迁移轨迹构造;
5、s2、迁移轨迹的裁切;
6、s3、利用跟踪模拟技术进一步提升重规划轨迹的可行性。
7、进一步的,假设在道路上行车的过程中,车辆突然发生了自身机械结构、转向、加减速等方面运动能力的衰减变化,而这种变化反映的就是故障,则步骤s1具体为:
8、首先用参数列表q来体现这种故障发生后的最新车辆运动能力情况,将新的参数列表记录为:
9、qnew=[xlb_new xub_new glb_new gub_new pnew];
10、使用以下公式实现轨迹迁移,即快速估算出qnew参数下的命题5的近似最优解znew:
11、znew=znorm+m·(qnew-qnorm).;
12、计算出的迁移轨迹是从名义起点向终点行驶的轨迹,进一步进行后续进行处理。
13、进一步的,步骤s2具体为:
14、首先,假设车辆在发生故障的在线时刻所处在的真实位置为惯性坐标系中的某一点p,将该点向迁移轨迹投影,得到投影点q;其中,投影是指沿着迁移轨迹上寻找与p距离最近的点位,将其称为q;
15、将迁移轨迹起点至q为止的部分裁去,剩余部分保留下来,裁切后剩余保留下来的轨迹为path。
16、进一步的,步骤s3具体为:
17、1)首先,在该场景中虚构一辆符合车辆当前故障工况下运动学能力的车辆虚拟底盘,并将其摆放在环境中的p点,以便体现车辆当前的位置,并要求该底盘的车速、加速度、前轮转角以及转角速度等变量都取值为此刻车辆真实的状态观测数值;
18、2)模拟车辆从p点开始,利用横向与纵向控制律跟踪path行驶,横向控制选择纯跟踪控制算法,纵向控制采取pd控制算法,模拟车辆在控制算法作用下,尽可能抵近path行驶的底盘响应效果,并将该轨迹记录下来,并将其称为final_path;
19、3)提取到该final_path后,将其视为轨迹在线重规划结果,并输出即可彻底完成完整的轨迹重规划任务。
20、与现有技术相比,本发明具有以下有益效果:
21、1、本发明的方法在充分利用名义轨迹信息基础上,实现高性能、高质量的轨迹重规划,在突发行车故障的条件下实时地规划出符合车辆故障后真实运动能力的轨迹;
22、2、本发明的方法利用灵敏度信息将名义轨迹迁移为故障运动学条件下合理的新轨迹,随后进一步对该轨迹进行裁切,然后利用模拟跟踪法增强其运动学可行性,从而生成一条尽可能合理的轨迹在线重规划结果;
23、3、本发明的方法中采取跟踪模拟的方式,模拟车辆虚拟底盘试图跟踪path行驶的过程,从而以极低的计算成本(模拟过程的计算自由度为0)推演出了车辆在当前真实故障运动能力意义下的可行且起点正确的行车轨迹,将其视为轨迹重规划结果是能够天然地符合边值约束与运动学约束的,能够有效完成轨迹重规划任务。
技术特征:1.突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,其特征在于,假设在道路上行车的过程中,车辆突然发生了自身机械结构、转向、加减速等方面运动能力的衰减变化,而这种变化反映的就是故障,则步骤s1具体为:
3.根据权利要求2所述的突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,其特征在于,步骤s2具体为:
4.根据权利要求3所述的突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,其特征在于,步骤s3具体为:
技术总结本发明涉及智能车轨迹规划技术领域,具体公开了突发故障条件下基于灵敏度模拟的智能车轨迹在线重规划方法,其技术要点为:包括以下步骤:S1、基于灵敏度的迁移轨迹构造;S2、迁移轨迹的裁切;S3、利用跟踪模拟技术进一步提升重规划轨迹的可行性。本发明的方法充分利用名义轨迹信息基础上,实现高性能、高质量的轨迹重规划,在突发行车故障的条件下实时地规划出符合车辆故障后真实运动能力的轨迹;本发明利用灵敏度信息将名义轨迹迁移为故障运动学条件下合理的新轨迹,随后进一步对该轨迹进行裁切,然后利用模拟跟踪法增强其运动学可行性,从而生成一条尽可能合理的轨迹在线重规划结果。我们将上述完整方案称为基于灵敏度模拟的轨迹在线重规划方法。技术研发人员:李柏,殷烛炎,陈鹏,周彬,余贵珍受保护的技术使用者:踏歌智行科技有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/352135.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表