一种固定式煤矿井下岩壁震动监测报警装置及方法与流程
- 国知局
- 2025-01-10 13:24:20
本发明涉及矿井震动监测和预警,具体而言,涉及一种固定式煤矿井下岩壁震动监测报警装置及方法。
背景技术:
1、在矿井开采过程中,岩壁失稳是一种常见且危险的现象,由于开采活动扰乱了地下原有的地质平衡,导致岩层的应力重新分布,这种变化可能引起岩壁发生震动、裂隙扩张甚至大规模的崩塌,严重威胁到采矿工人的人身安全并造成财产损失。因此,在矿井开采活动中,有效地监测和提前预警岩壁失稳情况,对保证矿井安全具有重要意义。
2、在矿井岩壁稳定性的监测手段中,主要的技术支持包括应力、应变、位移、微震和声发射等方法。其中,传统的应力、应变和位移等监测预警方案在动态特性上存在严重不足,监测滞后,无法实时且动态地追踪岩壁失稳的整个演变过程。微震监测适用于矿区整体的监测,但较低的监测频域使其难以捕捉到局部工作面上高频的微小震动信号,这在一定程度上影响了其对局部灾害的有效预警能力。与此相比,声发射监测以其较高的监测频域,在捕捉微小震动信号和确定震源方面具有显著优势。但是,由于矿井下的环境十分复杂,复杂的岩壁震动相当于难以估计运动状态的机动目标,其运动模型具有不确定性,使用常规的线性融合算法效果不好,导致声发射监测到的声波信号多为含噪的复杂信号,而且在没有发生明显裂纹扩展的情况下,可能无法提供充分的预警。
技术实现思路
1、本发明要解决的技术问题是:
2、为了解决矿井环境复杂,采集到的信号多为含噪信号,使用常规线性融合算法监测的准确性不佳,且在没有发生明显裂纹扩展的情况下,无法充分预警的问题。
3、本发明为解决上述技术问题所采用的技术方案:
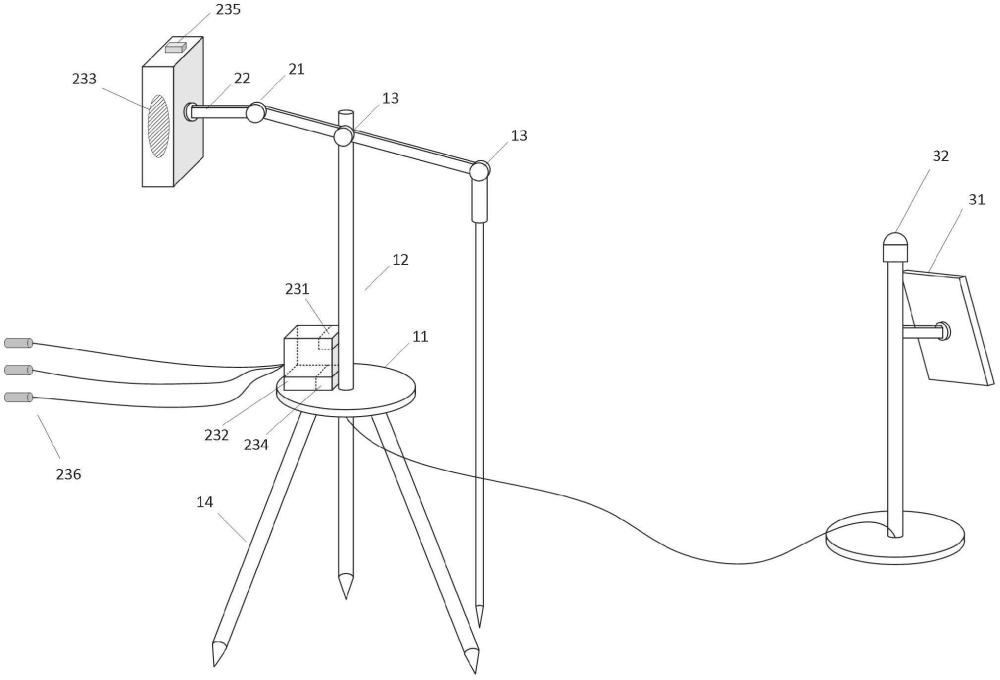
4、本发明提供了一种固定式煤矿井下岩壁震动监测报警装置,包括固定支撑座、微震监测系统和地面接收端,
5、所述固定支撑座包括基座和连杆组件,所述基座的下方设有三角固定锚,用于固定在地面或墙壁,所述基座上方设有连杆组件,所述连杆组件包括竖杆和横杆,所述竖杆的底端设置在基座上端中心处,竖杆的上端通过转轴与横杆连接,所述横杆的一端通过转轴连接有锚杆,所述锚杆用于插入地面或墙壁,所述横杆的另一端连接有云台稳定器,所述云台稳定器通过连接臂与微震监测系统中的雷达的壳体连接;
6、所述微震监测系统包括控制器、通信模块、信号处理模块、雷达、姿态传感器和微震传感器,所述雷达上设有姿态传感器,所述姿态传感器与控制器连接,所述控制器与云台稳定器连接,用于通过姿态传感器监测到水平角度超过阈值后,将信号发送至控制器,通过控制器控制云台稳定器驱动连接臂进而将雷达的位置调整至初始位置;
7、所述通信模块、信号处理模块和电源模块均设置在基座上,所述通信模块用于将雷达和微震传感器收集的震动数据传送至信号处理模块,在信号处理模块完成震动数据的处理后再将岩壁震动信息打包传输到地面接收端,实现与地面接收端的实时通信;所述信号处理模块用于将雷达监测得到的循环测距信息和微震传感器测量的岩壁内部震动信息进行去噪、平滑和归一化处理后,采用卡尔曼滤波算法对多传感器进行数据融合,将融合后的数据进行分析,以评估墙壁的震动情况,并提供预警信息。
8、进一步地,所述地面接收端包括显示模块和报警模块,所述显示模块用于接收并实时显示当前时间的微震数据处理结果,以及显示报警模块所提供的报警信息;所述报警模块用于在当前微震数据超过风险阈值时进行报警或水平角度偏差过大时报警,报警信息实时显示在地面终端的显示模块上。
9、进一步地,还包括电源模块和数据存储模块,所述电源模块用于为控制器、通信模块、信号处理模块、雷达、姿态传感器、微震传感器、显示模块和预警模块供电;所述数据存储模块用于将原始数据上传到云端储存,存储内容包括姿态传感器的角度数据和监测岩壁的周期性震动数据,所述监测岩壁的周期性震动数据包括振幅、频率、相位和震动波形。
10、一种固定式煤矿井下岩壁震动监测报警装置的报警方法,包括以下步骤:
11、s100、安装雷达和微震传感器,对待监测岩壁进行现场监测数据收集;
12、s200、利用现场监测数据对特殊地质事件的响应分析,确立岩壁的微震位移、微震频度和微震能量的阈值1;
13、s300、利用有限元软件进行岩体超载模拟,计算测点数据的最大容许值,确立阈值2;
14、s400、选取阈值1与阈值2中的较小值作为测点的预警阈值;
15、s500、对步骤s100获取的现场监测数据进行小波预处理后,利用卡尔曼滤波算法得到最优状态估计,并分析岩壁微震活动的异常变化,再结合步骤s400中所设置的预警阈值,设定预警判断逻辑。
16、进一步地,在步骤s500中,具体包括,
17、s510、利用基于交互多模型的卡尔曼滤波算法对小波预处理之后的现场监测数据进行交互多模型卡尔曼滤波;
18、设目标的基本运动模型和观测方程为:
19、xk+1=ak+1xk+bk+1μk+1+wk+1 (1)
20、zk+1=hk+1xk+1+vk+1 (2)
21、其中,xk为系统k时刻的状态向量,ak+1为系统k+1时刻的状态转移矩阵,μk+1为k+1时刻的状态控制向量,bk+1为k+1时刻的控制变量矩阵;wk+1为k+1时刻的控制系统的噪声,服从高斯分布:wk~n(0,q),q为系统噪声的协方差矩阵;zk+1为k+1时刻的测量向量,hk+1为k+1时刻的状态向量到测量向量的转换矩阵;vk+1为k+1时刻的测量的噪声,服从高斯分布:wk~n(0,r),r为测量噪声的协方差矩阵;
22、卡尔曼滤波算法包括预测和更新,其中,
23、预测过程:
24、
25、更新过程:
26、
27、其中,和分别为k+1时刻与k时刻的后验状态估计,为最优估计;表示k时刻的先验状态估计,及根据k时刻的最优估计预测k+1时刻的状态;pk+1和pk分别为k+1时刻与k时刻的后验估计协方差;为k+1时刻的先验估计协方差;kk+1为卡尔曼增益;
28、s520、采用多个卡尔曼滤波器进行并行处理,假定震动有n个运动模型,转移概率矩阵为:
29、
30、其中,pij为目标从运动模型i转移到运动模型j的转移概率;
31、s530、交互多模型方法包括输入交互、卡尔曼滤波、模型概率更新和输出交互,具体包括:
32、s531、交互输入,在k-1时刻,模型j的状态最优估计值为估计协方差矩阵为设为模型在时间点k时,预测当前时间点来自各个模型以一定比例混合的状态值,为来自各个模型混合得到的协方差矩阵;
33、设和均为k时刻模型j交互后的初始条件:
34、
35、其中,为模型i到j的相关性系数;
36、
37、其中,为模型i的相关性系数;
38、s532、模型j的卡尔曼滤波,设用于多模型交互跟踪中对目标进行滤波和预测k-1时刻j模型输入分别为和多模型卡尔曼滤波过程包括,
39、卡尔曼滤波的一次预测方程:
40、
41、其中,是j模型基于k-1时刻状态对k时刻状态的预测值;φj是j模型状态转移矩阵;
42、预测协方差矩阵:
43、
44、其中,是k-1时刻的状态估计协方差矩阵;qj是j模型预测过程中的协方差矩阵;
45、卡尔曼滤波增益:
46、
47、其中,hj是j模型观测矩阵,将状态空间映射到观测空间;rj是j模型观测噪声的协方差矩阵;
48、k时刻对应单个模型滤波器输出的系统状态估计和协方差估计分别为:
49、
50、其中,zk是k时刻的观测值;
51、s533、模型概率更新,采用极大似然估计进行模型更新,通过计算当前模型和当前目标状态的相似度来给出当前最合适的跟踪模型所占权重;
52、在k时刻模型i的最匹配的极大似然函数为:
53、
54、其中,n是观测向量的维度;
55、
56、模型j的更新概率为:
57、
58、其中c为归一化常数:
59、
60、s534、输出交互,总的状态估计方程为:
61、
62、总的更新误差协方差矩阵为:
63、
64、进一步地,在步骤s500中,所述小波变换预处理为小波阈值去噪法,包括,
65、小波分析,对步骤s100收集的现场监测数据,选择小波基函数和分解层数对实际震动信号进行小波分解,得到不同尺度的小波系数,具体包括:
66、当分解层数为n时,频段范围为:
67、fs/2n+1=fmax/2n (24)
68、其中,fs为采样频率,fmax为最大信号频率;
69、所述小波分解为将原始信号分解为不同频带的信号,小波函数公式如下,通过参数a定位频率,通过参数b定位时间:
70、
71、其中,是小波函数,为symlets小波;x(τ)是原始信号;
72、小波逆变换为:
73、
74、其中,cψ是小波函数的常数;
75、经小波变换后,选择具有自适应调节性能的阈值处理含噪泄漏声发射信号,选用阈值为:
76、
77、其中,σ为噪声标准差;j为分解层数;d为信号长度;ln表示以e为底的对数函数;
78、所述阈值函数包括软阈值和硬阈值:
79、
80、其中,为经阈值函数处理之后的小波系数,ωj,k为原小波系数,λ为所选取阈值。
81、进一步地,在步骤s100中,在利用雷达进行现场检测数据收集时,每个扫频周期发射信号和接收信号的数学模型为:
82、
83、其中,
84、
85、其中,a(t)和b(t)分别为发射和接收信号的幅值,f0为发射信号初始频率,k为调制斜率,为初始相位,t为时间,a0为电磁波传播速度,b为信号带宽,t为单个扫频周期时间,r0为雷达(233)到目标之间的初始距离,x(t)为目标物体的震动位移;
86、雷达接收到的回波信号通过低噪声放大器获得高增益的回波信号,然后与本振信号通过混频、低通滤波得到基带信号为:
87、
88、其中,
89、
90、基带差拍信号简化为:
91、
92、其中,c(t)为基带信号的幅值;
93、设在一个扫频周期内物体的位移x(t)为常数,第q个扫频周期时间内,基带差拍信号为:
94、
95、其中,
96、
97、其中,cq为第q个扫频周期基带差拍信号的幅值,fc为中心载波频率,λ0和λc分别为初始和中心载波频率对应的波长,fb为差拍频率,和x(qt)分别为第q个扫频周期时间内差拍信号的初始相位和目标震动位移时间序列;
98、得到相邻扫频周期震动位移时域信息的变化量为:
99、
100、其中,δx(t)为震动位移的变化量,为相邻扫频周期基带信号相位信息的变化量,θ为目标震动方向与雷达波束视线的夹角;
101、由位移变化量反演目标震动位移时域信息。
102、进一步地,在步骤s100中,进行雷达安装时,根据现场工况,在重点监测区域内安装雷达信标,并进行周期性扫描,获得一组岩壁震动位移数据;在进行微震传感器安装时,将其设置在轨道巷底板以及运输巷煤层,按布设要求每隔1m-5m设置一个钻孔,布设要求为:
103、①在弱冲击地压危险区,孔间距在4m-5m之间;
104、②在中等冲击地压危险区,孔间距在2m-4m之间;
105、③在强冲击地压危险区,孔间距在1m-2m之间;
106、采用三点式测量法,当有震动事件发生时,各测点在接收到p波和s波后,得到传感器测点到台站的距离;对于一个测点,震源位于以测点为球心,震源与测点的距离为半径的地下半球面上;两个半球面的交线为震源轨迹线,在地面的投影为震中轨迹线,再用第三个测点,得到另一条震中轨迹线,两者的交点为震中位置。
107、进一步地,在步骤s200中,所述特殊地质事件包括地面塌陷、地裂缝、地震和岩体崩塌,选取具有数据记录的特殊地质事件,通过地震波处理软件对地震波信号的p波和s波进行处理,确定矿震的位置、震级、释放的能量以及地震矩信息;其中,通过震相的持续时间估算释放的能量,以及利用地震波信号的到时和振幅信息,通过反演方法获取目标区域的速度模型和衰减结构,获取地震波在地壳中的传播特性和引起的形变位移,进而确定阈值1。
108、进一步地,在步骤s300中,结合煤矿井下地质工程图资料对矿井环境进行建模,利用超载法模拟岩壁的极限承重情况,超载工况采用k倍压力进行不断尝试,直至模型计算不收敛,保留此刻岩壁的形变位移数据和应力测点数据作为阈值2的参数数值。
109、相较于现有技术,本发明的有益效果是:
110、本发明一种固定式煤矿井下岩壁震动监测报警装置及方法,微震监测系统包括云台稳定器、姿态传感器、链接构件、监测系统模组,并以线性调频连续波雷达和声发射压电式微振传感器构成微震检测数据的采集系统;将这两种传感器通过预测滤波算法进行数据融合处理,实现了对岩壁外部形变位移及内部细微振动的全面监测,从而能够更加准确地评估岩壁的震动状态;这一方法,不仅有效地去除了噪声干扰下地时序数据问题,还极大提升了岩壁稳定性监测的整体性能,弥补了传统监测手段在数据覆盖范围上的局限性;此外,基于现场实测数据针对特定地质事件响应分析所得出的阈值,与利用有限元软件进行岩体超载模拟所得到的阈值进行对比研究,以此来精细化调整最终确定的预警标准;这种将实际观测数据和理论模型相结合的方式,显著提高了对与潜在岩壁失稳和地质灾害发生概率预测的准确性;
111、本发明提出的基于毫米波雷达和压电式微震传感器的岩壁震动监测装置及监测方法解决了当前岩壁稳定性的监测问题,通过微震监测系统和地面接收端,结合多传感器对岩体的形变位移、微震频率及能量和震源等信息进行实时监测,克服了单一传感器只对特定频率范围内的微震响应敏感的问题,以及传统的监测方案易受温度、湿度、电磁干扰等环境因素的影响,获得了高精度的震动参数,借助预测滤波算法对不同传感器的数据进行融合处理,降低了环境因素对监测结果的干扰,存储数据采用云存储和本地存储的双保险策略,实现高效全面地监测和预警。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352918.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表