基于原边控制的EV-DWPT系统输出功率控制方法及装置与流程
- 国知局
- 2025-01-10 13:29:04
本技术涉及无线电能传输技术,尤其涉及一种电动汽车动态无线充电系统输出功率控制方法及装置。
背景技术:
1、无线电能传输技术改变了有线输电需要电气接触的方式,使电能供给更加灵活,应用在电动汽车充电领域尤其是动态无线充电具有很大价值。电动汽车动态无线充电,能够实现电动汽车的边行驶边充电,其通过铺设在道路下面的供电导轨发射出来的能量给电动汽车车载电池进行充电,有效的解决了续航能力不足的问题,同时能够减少电动汽车车载电池组容量,降低电动汽车的成本。因此,电动汽车动态无线供电(electric vehicledynamic wireless power transfer,ev-dwpt)技术是电动汽车无线充/供电技术的一个非常重要分支。
2、在电动汽车动态无线充电系统中,根据不同的路面端能量发射装置结构,可以分为基于长导轨的动态无线充电和基于短导轨的动态无线充电两种。基于短导轨的电动汽车动态无线充电方案如图1所示,具有灵活、电磁污染小、损耗小等优点,成为当前的主流方案。然而当电动汽车行驶在导轨切换处时,发射线圈与拾取线圈之间的互感会有明显的变化,导致系统的输出功率不稳定。不稳定的功率脉动会影响车载电池充电寿命。因此,ev-dwpt系统的输出功率稳定控制至关重要。
3、基于磁耦合的ev-dwpt系统的输出功率对线圈耦合系数的变化很敏感。为了根据耦合互感变化调节输出功率,一般有一次侧控制、二次侧控制的功率控制方法。对于二次侧控制来说,需要在副边增加dcdc环节,进行功率调节,由于电动汽车动态无线充电系统功率等级一般较高,对dcdc环节的电气应力要求较高,同时对散热要求也比较高。
4、因此,有必要给出一种方法解决上述问题,通过一次侧控制的方式解决基于lcc-s补偿的ev-dwpt系统中由于耦合系数变化而引起的输出功率波动问题。
技术实现思路
1、本技术提供一种基于原边控制的ev-dwpt系统输出功率控制方法及装置,通过一次侧控制的方式解决基于lcc-s补偿的ev-dwpt系统中由于耦合系数变化而引起的输出功率波动问题。
2、本技术的技术方案如下:
3、根据本技术实施例的第一方面,提供一种基于原边控制的ev-dwpt系统输出功率控制方法,包括:
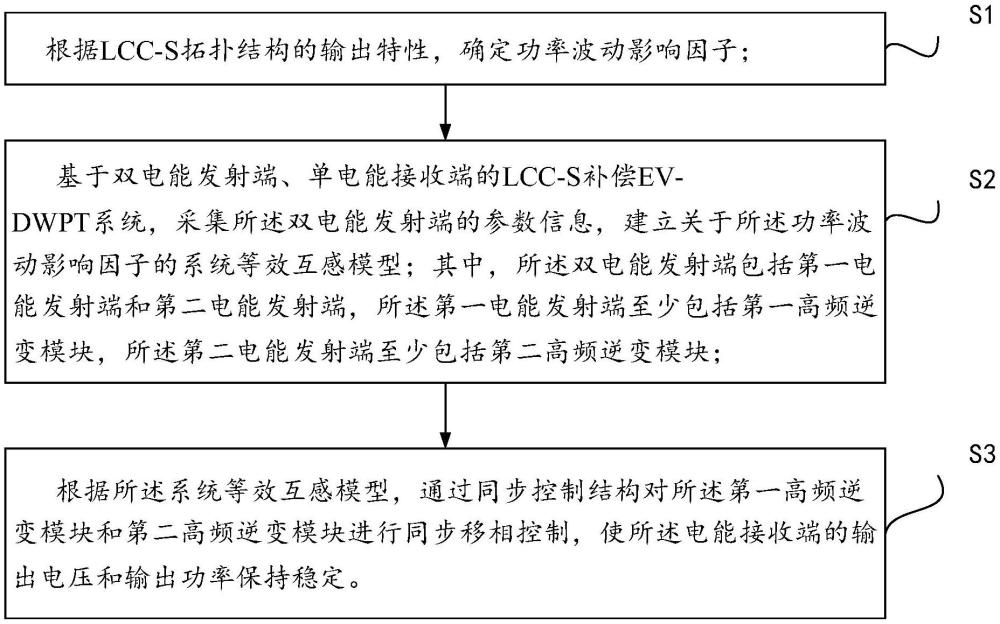
4、s1:根据lcc-s拓扑结构的输出特性,确定功率波动影响因子;
5、s2:基于双电能发射端、单电能接收端的lcc-s补偿ev-dwpt系统,采集所述双电能发射端的参数信息,建立关于所述功率波动影响因子的系统等效互感模型;其中,所述双电能发射端包括第一电能发射端和第二电能发射端,所述第一电能发射端至少包括第一高频逆变模块,所述第二电能发射端至少包括第二高频逆变模块;
6、s3:根据所述系统等效互感模型,通过同步控制结构对所述第一高频逆变模块和第二高频逆变模块进行同步移相控制,使所述电能接收端的输出电压和输出功率保持稳定。
7、可选地,所述lcc-s拓扑结构包括:
8、直流电源、高频逆变电路、原边补偿电路、发射线圈、接收线圈、副边补偿电路、整流滤波电路和用电负载;其中,
9、所述原边补偿电路包括补偿线圈lf、第一补偿电容cf和第二补偿电容cp,补偿线圈lf的一端连接高频逆变电路的一端,补偿线圈lf的另一端连接有第一补偿电容cf的一端和发射线圈lp的一端,发射线圈lp的另一端连接第二补偿电容cp,高频逆变电路的另一端分别连接第一补偿电容cf的另一端和第二补偿电容cp的另一端;
10、所述副边补偿电路包括第三补偿电容cs,所述第三补偿电容cs的一端连接整流滤波电路的一端,第三补偿电容cs的另一端连接接收线圈ls的一端,所述整流滤波电路的另一端连接接收线圈ls的另一端。
11、可选地,根据lcc-s拓扑结构的输出特性,确定功率波动影响因子,具体包括:
12、s101:在所述lcc-s拓扑结构处于谐振状态的条件下,建立副边电抗模型和副边输出电流模型;
13、s102:根据所述副边电抗模型和副边输出电流模型,在所述副边输出电流保持稳定时,确定所述功率波动影响因子。
14、可选地,在所述lcc-s拓扑结构处于谐振状态的条件下,建立副边电抗模型和副边输出电流模型,具体包括:
15、在lcc-s拓扑结构中,当系统谐振时:
16、
17、副边的等效负载为则有:
18、
19、其中,zs表示副边电抗,zref表示一次侧发射阻抗;zp表示原边电抗;
20、
21、其中,it表示原边输入电流,ip表示原边谐振腔电流,is表示副边输出电流;
22、udc表示直流输入电压,uin表示交流输入电压,ul和il分别表示电能接收端的直流输出电压和电流,lp、ls和lf分别表示发射线圈、接收线圈和补偿线圈的电感;m表示发射线圈和接收线圈之间的互感;ω表示工作频率,req表示副边的等效负载。
23、可选地,根据所述副边电抗模型和副边输出电流模型,在所述副边输出电流保持稳定时,所述确定功率波动影响因子;具体包括:
24、基于公式(2)和公式(3)进行原边的功率控制,确定功率波动影响因子为原边谐振腔电流ip和能量线圈间互感m。
25、可选地,在双电能发射端、单电能接收端的lcc-s补偿ev-dwpt系统中,第一电能发射端和第二电能发射端相邻的铺设在公路上,第一电能发射端的发射线圈lp1和第二电能发射端的发射线圈lp2与设置在电动汽车上的电能接收端的接收线圈ls构成能量线圈;
26、其中,m1表示第一电能发射端的发射线圈lp1和接收线圈ls之间的互感,m2表示第二电能发射端的发射线圈lp2和接收线圈ls之间的互感,m3表示第一电能的发射线圈lp1和第二电能的发射线圈lp2的互感;m1和m2会随着电子汽车的移动而变化;m3在线圈间距确定的情况下保持不变。
27、可选地,所述基于双电能发射端、单电能接收端的lcc-s补偿ev-dwpt系统,采集所述双电能发射端的参数信息,建立关于所述功率波动影响因子的系统等效互感模型,具体包括:
28、s201,确定接收线圈ls对发射线圈lp1和发射线圈lp2产生的反射阻抗分别为:
29、
30、其中,则参数取值设为lf1=lf2=lf,cf1=cf2=cf,cp1=cp2=cp,lp1=lp2=lp,且谐振腔电流相同ip1=ip2=ip,则所述接收线圈ls对发射线圈lp1和发射线圈lp2产生的反射阻抗转化为:
31、
32、s202:设置约束条件为:当忽略高频逆变模块损耗和补偿网络损耗时,直流输入功率等于发射线圈上消耗的有功功率,则有:
33、
34、s203:当ip1和ip2同频同相且大小相同时,则有系统等效互感模型为:
35、
36、其中,pdc1表示第一电能发射场的直流输入功率,pdc2表示第二电能发射场的直流输入功率,udc1表示第一电能发射场的直流输入电压,idc1表示第一电能发射场的直流输入电流,ip1_rms表示谐振腔电流ip1的有效值,ip2_rms表示谐振腔电流ip2的有效值,rp1表示发射线圈lp1的等效电阻,re{zr1}和re{zr2}表示两个反射阻抗的等效电阻,re{zs}表示表示副边电抗zs的等效电阻。
37、另一方面,提供一种基于原边控制的ev-dwpt系统输出功率控制装置,包括:
38、影响因子确定模块,用于根据lcc-s拓扑结构的输出特性,确定功率波动影响因子;
39、模型构建模块,基于双电能发射端、单电能接收端的lcc-s补偿ev-dwpt系统,采集所述双电能发射端的参数信息,建立关于所述功率波动影响因子的系统等效互感模型;其中,所述双电能发射端包括第一电能发射端和第二电能发射端,所述第一电能发射端至少包括第一高频逆变模块,所述第二电能发射端至少包括第二高频逆变模块;
40、同步移相控制模块,根据所述系统等效互感模型,通过同步控制结构对所述第一高频逆变模块和第二高频逆变模块进行同步移相控制,使所述电能接收端的输出电压和输出功率保持稳定。
41、有益效果:
42、本技术提供了提供一种基于原边控制的ev-dwpt系统输出功率控制方法及装置,根据lcc-s拓扑结构的输出特性,确定功率波动影响因子;基于双电能发射端、单电能接收端的lcc-s补偿ev-dwpt系统,采集所述双电能发射端的参数信息,建立关于所述功率波动影响因子的系统等效互感模型;其中,所述双电能发射端包括第一电能发射端和第二电能发射端,所述第一电能发射端至少包括第一高频逆变模块,所述第二电能发射端至少包括第二高频逆变模块;根据所述系统等效互感模型,通过同步控制结构对所述第一高频逆变模块和第二高频逆变模块进行同步移相控制,通过一次侧控制的方式解决基于lcc-s补偿的ev-dwpt系统中由于耦合系数变化而引起的输出功率波动问题,实现了电动汽车动态行驶过程中电动汽车端输出功率的稳定控制,使输出电压和功率稳定。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
本文地址:https://www.jishuxx.com/zhuanli/20250110/353418.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表