一种联合站内/间量测的三站混合目标定位方法与流程
- 国知局
- 2025-01-10 13:30:29
本发明属于目标定位,涉及一种联合站内/间量测的三站混合目标定位方法。
背景技术:
1、多站雷达高精度目标定位是分布式雷达系统的一种独特优势。目标定位能力来自于多站雷达对目标观测视角的差异,在雷达数给定的条件下,雷达观测目标的视角越分散,越能获得高的系统空域分集增益,目标定位精度也就越高;反之,若目标位于多站雷达的同一观测方向,则无法有效定位。目标定位在军用和民用领域都具有广阔的应用前景:在军用方面,目标位置的精确估计,对于战时情报获取、跟踪乃至最后的精确打击都提供了有力保障;而在民用方面,精确定位可为通信、救援、交通等民生服务提供可靠帮助。
2、目标定位一般分为有源定位和无源定位两种。有源定位指雷达主动发射信号,经目标照射后返回接收端,即发射信号源可控,是一套完备的收-发系统,但发射源的存在,使得雷达隐蔽性差,易受敌方电子干扰;无源定位雷达不发射信号,只接收目标辐射的信号,隐蔽性好,但目标辐射强度低时却无法定位目标。空-天跨域雷达系统采用高轨卫星照射任务区域,无人机接收的方式定位目标,辐射源合作可控,敌方干扰我方高轨卫星的代价很大,结合了有源定位和无源定位的各自优势,可作为定位类型的一种补充。对于一发多收的分布式雷达目标定位而言,到达时间差(time difference ofarrival,tdoa)定位至少需要四部接收站,而在战时环境中,接收站数是一种十分宝贵的感知资源,有必要研究给定接收站数下的目标定位问题。为此,本发明对三站目标定位展开研究,并提出一种联合站内/间量测的三站混合目标定位方法。
3、不同于卫星导航定位技术,定位在用户处完成位置解算。在雷达目标定位问题中,雷达与目标之间的关系是一种非合作关系,定位的前提是目标已被检测,定位解算在接收端的中央处理中心完成。根据信号获取阶段的不同,目标定位方法可分为直接定位方法和间接定位方法。直接定位方法指直接联合多个接收站的目标信号,在信号级层面直接估计目标位置,若多雷达以近似相同的视角观测目标,还可以通过信号相参的方式,利用相位信息定位目标,显著提高定位精度。在直接定位方法中,目标位置可以通过多维搜索或优化松弛的方法实现,但多维搜索方法面临相位模糊和计算量较大的问题,而优化松弛方法则需要调整参数以及在凸松弛近似和定位精度之间权衡。间接定位方法顾名思义是先从信号中提取间接量测,如距离、doppler、角度等,再根据提取的量测对目标进行量测级定位,由于间接定位方法孤立了定位过程,且可以获得目标位置的闭合形式解,该类方法已成为研究的主流方法。
4、目标定位的前提是目标参数对于当前雷达系统来说是可识别的。对于空中(三维)目标定位问题而言,排除病态观测构型之外,tdoa定位至少需要四站,差分将额外消耗一部公共接收站。此外,目标定位与雷达站数、雷达-目标几何构型和信噪比(snr)等因素息息相关,若要达到定位精度指标要求,还需要对上述多个因素联合雷达系统参数进行优化。chan和ho提出的椭球定位估计器是一种经典的两阶段tdoa定位方法,该方法在第一阶段将参考距离(参考雷达到目标的距离)连同目标位置构成增广参数矢量,通过将非线性方程组线性化的方式估计增广参数矢量,第二阶段则利用参考距离和目标位置之间的关系对目标定位结果进行更新。进一步地,在2004的iscas大会上,ho和parith将该方法修改为一种迭代形式,使之适用于接收站存在位置误差的情况,在接收站位置误差很小的条件下,该方法可以逼近参数估计的克拉美-罗下界,而当位置误差较大时,非线性的引入会导致定位精度下降。为此,研究人员在第二阶段尝试用一阶taylor近似技术替代,取得了一定的精度改善。然而,该类方法将参考距离引入增广的参数矢量中,这样一来,至少需要五部接收站才能满足参数可识别的要求。为此,公开文献指出可以将参考距离的估计先代入增广参数矢量中,来减少所需接收站数。
5、尽管上述方法可以将tdoa定位的接收站数降至最少四站。然而,对于实时侦察和监视而言,接收站数是一种十分宝贵的资源。在允许的条件下,我们希望用尽可能少的接收站数来满足定位指标要求,甚至在满足指标要求的条件下,用一定程度的定位精度损失为代价来换取站数减少。在这些情况下,研究三站目标定位将显得十分必要。若利用tdoa量测进行多站目标定位,至少需要四部接收站。如果只有三部接收站,则无法识别的那部分目标参数需要通过其他额外量测进行估计。
6、为此,本发明联合雷达站内/间的多量测信息,通过站内估计参考距离和目标x坐标的方式,使得剩余目标参数的估计可通过三站实现,提出一种联合站内/间量测的三站混合目标定位方法,为战略、侦察和制导等应用提供较为精确的目标位置信息。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种联合站内/间量测的三站混合目标定位方法,为三站目标定位问题提供一种解决方案。
2、本发明提供的技术方案如下:
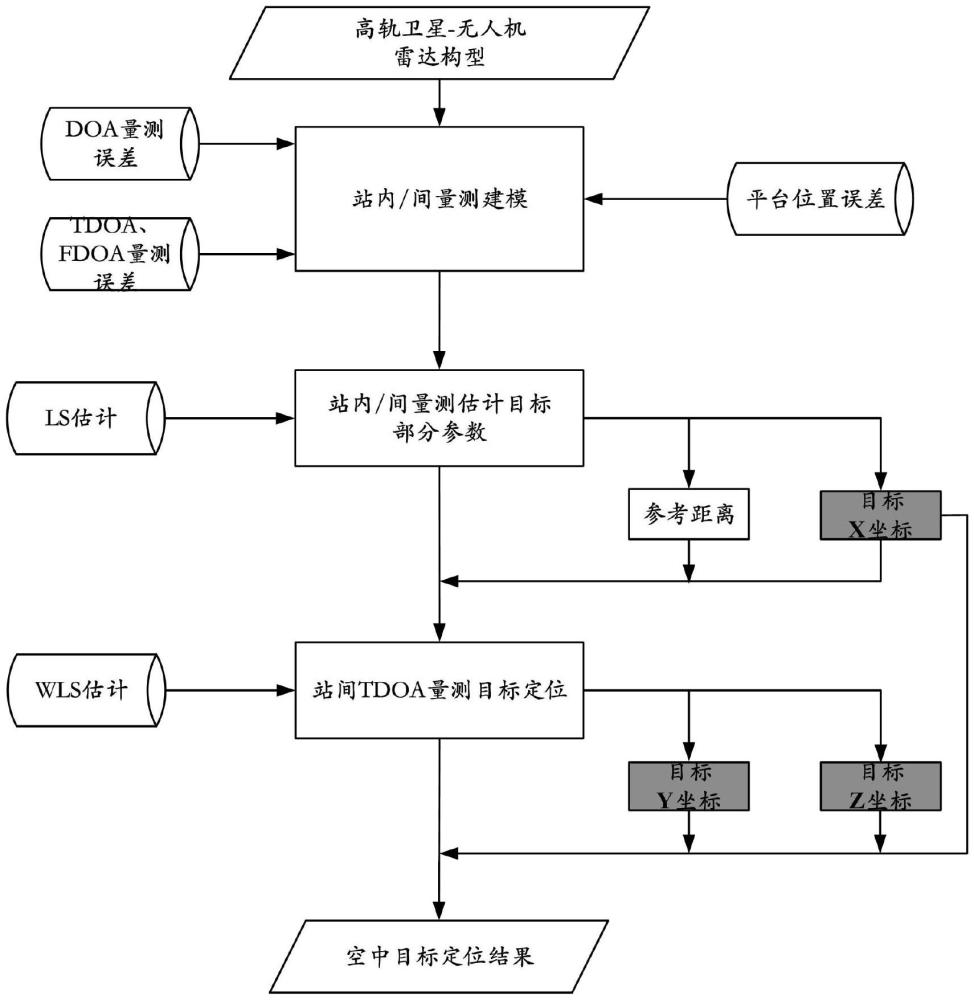
3、第一方面,一种联合站内/间量测的三站混合目标定位方法,包括:
4、获取各雷达站内doa量测,将雷达划分为一台参考站和两台接收站,获取接收站-参考站的站间tdoa量测、fdoa量测;
5、利用doa量测和tdoa量测估计目标x轴坐标和目标到参考站的距离;
6、利用fdoa量测对目标x轴坐标和目标到参考站的距离进行修正;
7、利用tdoa量测及修正后x轴坐标和目标到参考站的距离,确定目标y轴和z轴坐标,完成三站目标定位。
8、结合第一方面,所述获取各雷达站内doa量测,包括:
9、假设空-天分布式雷达网络由单部高轨星载雷达和k部无人机载雷达构成,高轨星载雷达发射信号,无人机载雷达仅接收信号,接收雷达数k=3;卫星导航位置位于考虑到gnss的定位精度有限,卫星真实位置a和导航位置ao之间的关系描述为a=ao+δa=[xa,ya,za]t,式中δa为卫星导航位置误差,卫星速度为va;第i部无人机导航位置位于真实位置si和导航位置的关系为式中δsi为第i部无人机位置误差,无人机速度均为vs;
10、假设场景中的空中目标位于u=[x,y,z]t,第i部无人机观测目标的真实接收锥角为:
11、
12、式中e1=[1,0,0]t;doa量测表示为:
13、
14、其中表示doa量测噪声。
15、结合第一方面,所述将雷达划分为一台参考站和两台接收站,获取接收站-参考站站间tdoa量测、fdoa量测,包括:
16、从高轨卫星发射,经过目标后,由第i部无人机接收的真实双基距离表示为:
17、bi=||u-a||2+||u-si||2
18、距离差分后,
19、ri1=bi-b1=ri-r1
20、式中ri=||u-si||2表示目标到第i部无人机的距离,则tdoa量测写成:
21、
22、其中c表示光速,δti1表示差分时延量测噪声;
23、真实双基doppler为:
24、
25、式中vt为目标瞬时速度,λ为波长,
26、
27、ψt和分别为发射和接收速度锥角,多普勒差分后,
28、
29、fdoa量测为:
30、
31、其中表示fdoa量测噪声。
32、结合第一方面,所述利用doa量测和tdoa量测估计目标x轴坐标和目标到参考站的距离步骤,包括:考虑到雷达位置误差对观测视角的影响很小,即:
33、
34、和ri=ri1+r1,得:
35、
36、定义参数矢量将所有接收雷达的量测整理为矩阵形式,写成:
37、ha=gav1
38、式中:
39、
40、和
41、
42、用含噪量测矢量和分别替代无噪量测矢量和r1=[r21,r31]t,则最小二乘问题建立为:
43、
44、部分目标参数v1的ls解为:
45、
46、结合第一方面,所述利用fdoa量测对目标x轴坐标和目标到参考站的距离进行修正的步骤,包括:第i部接收雷达和参考雷达的fdoa量测,写成:
47、
48、正侧视阵的速度锥角和阵面锥角相等,有则由于公共项(vs+vt)/λ的存在,fdoa量测之间约束为:
49、
50、将代入上述fdoa量测之间约束表达式,得:
51、
52、即:
53、
54、将和整理为矩阵形式,得:
55、ha=gav1
56、式中ga修正为:
57、
58、和
59、
60、结合第一方面,所述利用tdoa量测及修正后x轴坐标和目标到参考站的距离,确定目标y轴和z轴坐标,完成三站目标定位的步骤,包括:
61、将tdoa量测ri1=ri-r1整理为ri1+r1=ri,并两边平方,得:
62、
63、将和代入,得:
64、
65、其中和将来自所有接收站的tdoa量测整理为矩阵形式:
66、
67、式中v2=[y,z]t,
68、
69、和
70、
71、则根据gauss-markov定理,最小化其中剩余参数v2的加权最小二乘(wls)估计为:
72、
73、式中为tdoa矢量,加权矩阵w为
74、w=(aqtat+bqsbt)-1
75、式中qt=c2e[δtδtt]和qs=e[δsδst],其中δt=[δt21,…,δtk1]t和
76、a≈ik-1
77、
78、最终,三站目标定位结果表示为
79、第二方面,一种联合站内/间量测的三站混合目标定位装置,包括:
80、一个或多个处理器;
81、存储装置,用于存储一个或多个程序,
82、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实施第一方面所述的联合站内/间量测的三站混合目标定位方法。
83、第三方面,一种可读存储介质,其上存储有计算机程序,该程序被处理器执行时实施第一方面所述的联合站内/间量测的三站混合目标定位方法。
84、第四方面,一种计算机程序产品,所述计算机程序产品包括:计算机程序,当所述计算机程序被运行时,执行第一方面所述的联合站内/间量测的三站混合目标定位方法。
85、根据本发明提供的一种联合站内/间量测的三站混合目标定位方法,具有以下有益效果:
86、(1)本发明提供的一种联合站内/间量测的三站混合目标定位方法,创新地提出利用doa量测和tdoa量测估计参考距离和目标x坐标,并利用fdoa量测辅助提升参数估计精度,该方法减少了所需doa量测数,能够降低系统成本,且便于工程实现。
87、(2)本发明提供的一种联合站内/间量测的三站混合目标定位方法,为三站位置不确定下的目标定位方法,该方法通过“压缩”参数的方式在接收站位置未知的条件下,构造伪线性方程组估计目标y和z坐标,该方法仅需三部接收站即可完成目标定位,稳健性好,具有良好的工程应用前景。
本文地址:https://www.jishuxx.com/zhuanli/20250110/353571.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表