一种广义噪声下船舶交流微电网的分布式包含控制方法
- 国知局
- 2025-01-10 13:31:29
本发明涉及新能源及节能,特别是涉及一种广义噪声下船舶交流微电网的分布式包含控制方法。
背景技术:
1、随着国际海运的发展,船舶已成为全球贸易和运输的重要工具,航运业承担着超过全球80%贸易往来的运输工作。常规船用燃料主要是重油和柴油,其燃烧会产生大量的二氧化碳等污染物。虽采用了许多碳捕获和减排措施,但仍达不到彻底解决污染。因此,将电力推进系统集成到船舶中,使推进负载和其他负载都由电力驱动,并全面开发船上的新能源电力驱动,以彻底解决污染。但是对于现有的燃料发动机船舶,为平衡经济利益和环境保护,通常对现有的传统船舶进行新能源改造。在实际对船舶改造的过程中,单一的新能源发电机无法承担船舶全部的用电需求,通常需要多种新能源(如燃料电池、光伏阵列等)作为分布式发电机被集成到船舶已有的交流微电网中。并且实际运行中,船舶电力系统存在各种干扰,例如,在有限的空间电子设备之间存在电磁干扰,分布式计算设备的通信和计算噪声等干扰,以及海洋环境对船舶微电网(shipboard microgrid,简称smg)数据的采集的干扰。此时,如何为需要高质量电能的微电网的负载侧(电力推进系统、以及一些在不同的电压水平下工作的负荷,如雷达、照明系统和生活用电),提供稳定电能成为关键。受天气,航线等影响,在船舶微电网中,各发电机供电和负载耗电容易突然产生变化。
2、现有的船舶交流微电网技术,通常关注综合能源管理问题,以实现混合新能源发电机的能量调度和潮流简单的平均或按比例分配,无法根据微电网当下需求,对分布式发电机输出状态进行调节,以满足负载侧供电需求。
3、因此,需要一种广义噪声下保证各分布式发电机稳定且灵活供电的交流微电网控制策略。
技术实现思路
1、有鉴于此,本发明提供了一种广义噪声下船舶交流微电网的分布式包含控制方法,解决了将多种新能源发电机并入船舶交流微电网中电力系统存在噪声和无法灵活调节各节点电压的问题。
2、为此,本发明提供了以下技术方案:
3、一种广义噪声下船舶交流微电网的分布式包含控制方法,包括:
4、将新能源发电机通过逆变器作为分布式发电机集成到船舶交流微电网中,建立多模态船舶交流微电网的控制模型;
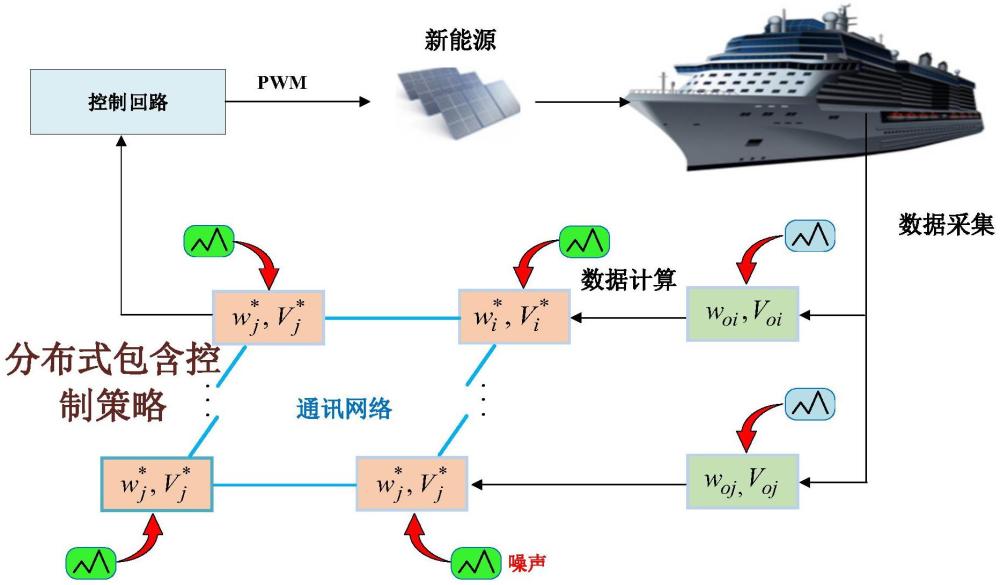
5、模型通过下垂策略作为一次控制调节分布式发电机电压和频率,并完成功率分配;由控制系统采用分布式包含策略,通过控制器增益调节一次控制所带来的电压和频率的偏差;
6、所述分布式包含控制策略包括:
7、制定广义噪声下的包含控制协议:
8、
9、其中,表示每个分布式发电机的参考信息,vnk=[wnk(t),vnk(t)]t表示每个分布式发电机的状态、表示噪声强度、ζij表示广义噪声,cv为控制器增益;
10、利用广义噪声下的包含控制协议,获得噪声强度矩阵以及广义噪声下分布式发电机的输出状态;
11、通过包含误差调节分布式包含控制策略的控制器增益,使其在广义噪声下满足nos稳定条件;
12、所述制定广义噪声下的包含控制协议,包括:
13、所述分布式发电机电压、频率和功率信息作为包含控制的输入;
14、制定无噪声时包含控制协议;
15、将船舶微电网在运行中受到干扰的影响,描述为广义噪声。
16、进一步地,所述多模态船舶交流微电网的控制模型,包括:
17、面向用户端的服务层,包括数据监控和能源管理;
18、控制层,实现控制策略与各种软件的兼容,通过对数据的分析计算,对电气层进行控制;
19、数据层,相邻分布式发电机之间交换各种类型的数据包,并配置多模态识别表以增强数据安全性;
20、电气层包括分布式发电机和负载。
21、进一步地,所述控制系统,包括:服务层、控制层、数据层。
22、进一步地,所述模型通过下垂策略作为一次控制调节分布式发电机电压和频率,并完成功率分配,包括:
23、
24、分布式发电机之间的有功和无功功率实现共享的约束条件:
25、
26、其中,wi为分布式发电机的工作频率、vi为分布式发电机的工作电压;pi为分布式发电机输出的有功功率、qi为分布式发电机的输出的无功功率;和为下垂控制的参考点频率和电压;kpi和kqi为下垂控制系数,通过额定功率和最大允许电压和频率偏差来确定。
27、进一步地,所述分布式发电机电压、频率和功率信息作为包含控制的输入,包括:
28、通过对发电机工作频率和电压进行微分,作为控制系统输入:
29、
30、其中,在n个分布式发电机的船舶交流微电网中,采用功率控制器进行功率计算、低通滤波和下垂控制,获得逆变器桥的电压控制器基准和工作频率;对功率控制环求时间导数,表示为:
31、
32、其中,wc为滤波器的截止频率;vodi,voqi,iodi,ioqi分别为三相电压经过d-q变换后电压和电流的分量。
33、进一步地,所述由控制系统采用分布式包含策略,通过控制器增益调节一次控制所带来的电压和频率的偏差:
34、
35、其中,cw和cv是耦合增益,影响控制器转速;wnk和vnk是参考频率和电压信息。
36、进一步地,所述制定无噪声时包含控制协议,包括:
37、分布式包含控制系统包括:n+m个智能体;
38、其中,跟随者集合f={1,2,…,n}、虚拟领导者集合l={n+1,…,n+m};将拉普拉斯矩阵定义为:
39、
40、其中,矩阵的每个特征值都有一个正实部;
41、矩阵满足每一行和为1,且所有的元素都是非负的;
42、此时,包含控制协议为:
43、
44、且分布式发电机输出状态满足约束条件,存在一个非负常数满足使得:
45、
46、即实现至少有一条来自虚拟领导者的状态消息被定向到所有分布式发电机终端,且包含在虚拟领导者所生成的凸包内;其中,δ为均方包含误差的上界。
47、进一步地,所述将船舶微电网在运行中受到干扰的影响,描述为广义噪声:
48、ζ(0)=0
49、其中,θ(t)为白噪声,ζij(t)是系统内存在的干扰。
50、进一步地,所述利用广义噪声下的包含控制协议,获得噪声强度矩阵以及广义噪声下分布式发电机的输出状态,包括:
51、确定广义噪声对各分布式发电机的影响,将广义噪声整理为紧凑噪声强度矩阵:
52、
53、其中,fi=diag{fi1,fi2,…,fin},a(i,·)表示邻接矩阵的第i行,k(i,·)代表了虚拟领导者增益矩阵的第i行;
54、广义噪声下,发电机输出状态:
55、
56、进一步地,所述通过包含误差调节分布式包含控制策略的控制器增益,使其在广义噪声下满足nos稳定条件,包括:
57、定义跟随者的包含误差ei:
58、
59、获得其紧凑形式:
60、基于随机微分方程框架得到系统的稳定性条件:
61、4λminl1cv-ρ2>0
62、其中,ρ为紧凑噪声强度矩阵的二阶矩上界,λmin为构造的参数矩阵的最小特征值;
63、利用gronwall不等式条件得到系统状态参数期望偏差的最大值:
64、
65、利用大数定律得到系统频率和电压偏差存在的上界。
66、本发明的优点和积极效果:
67、本发明构建了多模态船舶交流微电网的框架,并针对发电侧,以基于逆变器的船载微源的分层控制为基础,提出了适用于船舶交流微电网的分布式包含控制策略。可有效处理多种新能源接入船舶交流微电网的协同控制问题,提高能源利用率。构建了多模态船舶交流微电网,分为电气层,数据层,控制层,服务层,异构分布式发电机可以通过其传输数据,以支持分布式二次控制的实现,并可以实现软件定义的算法。将多种新能源并入船舶交流微电网。
68、与常用的基于分布式一致性策略的方法相反,本发明实现了船舶交流微电网的基于包含的控制策略,以提高分布式发电机调节船舶交流微电网每个pcc点电压的灵活性,并使其在更广泛的实际情况下可用。
69、本发明引入广义噪声来描述干扰对所提出的策略的影响。基于随机微分方程理论,通过分析广义噪声对系统稳定的影响,得出控制策略的nos(noise-to-state,简称nos)稳定条件,并且包含误差的均方可以收敛到原点附近的一个小邻域,进而实现船舶交流微电网在广义噪声下的包含控制。提高系统的稳定性和灵活性,并克服广义噪声对船舶交流微电网带来的消极影响。
本文地址:https://www.jishuxx.com/zhuanli/20250110/353689.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表