一种自动驾驶系统ODC边界构建方法
- 国知局
- 2025-01-10 13:32:58
本发明属于自动驾驶,具体涉及一种自动驾驶系统odc边界构建方法。
背景技术:
1、随着不同级别自动驾驶汽车的快速发展,从封闭园区、港口和机场到高速公路甚至城市交通场景,自动驾驶系统已在多种场景中得到广泛应用,随之而来的是自动驾驶系统(advanced driving system,ads)需要应对的任务和场景也变得越来越复杂,这给系统的安全运行带来了一系列挑战。具体来说,典型长尾交通场景、恶劣的环境条件以及驾驶员和乘客的滥用严重干扰了系统功能的安全可靠运行。例如,ads可能会遇到罕见的天气条件(如浓雾和暴风雪)、道路异常(如道路塌陷或施工)以及其他交通参与者或驾驶员的不寻常行为,这些在系统设计阶段很难预见。因此,这要求在设计与开发ads时,充分考虑系统必要的运行条件,以确保系统在面对各种未知和罕见事件时保持安全有效运行。然而,由于系统的复杂程度高和ai模型的黑盒性,针对高等级自动驾驶系统,传统的安全规范无法充分描述和定义当前自动驾驶系统的安全运行条件。因此,如何有效识别、评估和定义高级ads的能力和局限性,对于防止任何功能滥用和促进安全有效运行至关重要。
2、当前,主要通过定义系统的运行设计域(operational design domain,odd)来设定系统可运行的安全场景边界,以确保自动驾驶系统的可靠运行。odd指车辆可以安全驾驶的外部环境(例如,道路类型、天气条件、交通参与者),通过评估其可用区间的大小以及可应对场景条件,可反映ads的自动化水平。在l5级别,自动驾驶系统达到甚至超过人类驾驶员水平,系统可在无限制的odd中运行。然而,odd概念框架一个主要的局限性是它仅反映了影响自动驾驶车辆的外部因素,而忽略了同样重要的车内条件。因此,在odd的概念基础上,设计运行条件(odc,operational design condition)的定义被提出,odc的概念框架不仅包括odd,还包括必要的车辆内部条件(驾乘人员状态、车辆运动状态、系统功能状态等),全面描述了自动驾驶车辆可在哪些条件下有效运行。然而,当前缺少系统性、流程化的odc边界设计方法。这最终限制了高级别ads的推广落地应用,导致系统可用性不佳,并在执行动态驾驶任务过程中频繁发生中断。
3、因此,实有必要提供一种自动驾驶系统odc边界构建方法以解决上述问题。
技术实现思路
1、本发明提供一种自动驾驶系统odc边界构建方法,首先,设定自动驾驶系统的功能目标与功能规范。接着,通过系统理论过程方法进行危害识别与风险评估来揭示系统潜在的不足和危害,这些危害可能由特定的odc触发条件组合触发。随后,基于触发条件定义需测试覆盖的场景状态空间。然后,将系统接入仿真框架开展仿真测试,通过收集测试结果评估区间风险水平,定义可接受风险的安全边界,从而可以解决背景技术中涉及的至少一个技术问题。
2、为了解决上述技术问题,本发明是这样实现的:
3、一种自动驾驶系统odc边界构建方法,包括如下步骤:
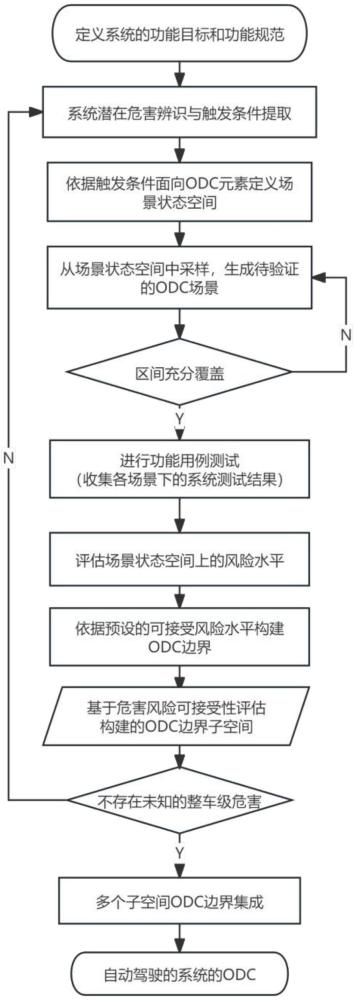
4、步骤s1,定义自动驾驶系统的功能目标和功能规范;
5、步骤s2,基于自动驾驶系统的决策逻辑过程,辨识自动驾驶系统潜在的危害,确定危害的触发条件并分析导致危害的场景元素,基于导致危害的场景元素构建针对特定危害的场景状态子空间;
6、步骤s3,基于步骤s1定义的功能目标和功能规范以及步骤s2构建的场景状态子空间对自动驾驶系统进行仿真测试,搜集不同测试用例下自动驾驶系统的反馈;
7、步骤s4,多次执行步骤s2以及步骤s3,持续发掘自动驾驶系统未知的危害,直至不存在未知的整车级危害,基于仿真测试的结果评估自动驾驶系统在各个危害关联的场景状态子空间下的风险水平,根据预设的可接受风险水平构建各个场景状态子空间下的odc边界,将所有场景状态子空间的odc边界集成为自动驾驶系统的odc边界。
8、作为一种优选的改进,自动驾驶系统s的设计运行条件odcs为工作点(u,c)的集合,其中u∈u表示自动驾驶系统s在实际运行环境c∈c下的功能表现,工作点(u,c)应满足预期的设计条件φ=(r,b,e)s,其中包括自动驾驶系统应实现的要求r、在构建自动驾驶系统时需要考虑的约束b以及自动驾驶系统应运行的上下文环境e,则自动驾驶系统s的odcs表示为:
9、odcs={(u,c)|(u,c).sat(r,b,e)s∧c∈c,u∈u}。
10、作为一种优选的改进,步骤s3中,仿真测试的过程具体包括如下步骤:
11、基于scenic场景描述语言对场景状态子空间进行建模,使用概率建模语言来指定场景状态子空间中实体特征的初始状态及其随时间的行为配置的分布;
12、使用采样算法对场景状态子空间进行搜索,确保场景状态子空间被充分覆盖;
13、构建仿真测试框架,将自动驾驶系统接入所述仿真测试框架进行仿真测试,搜集自动驾驶系统在不同测试用例下的反馈。
14、作为一种优选的改进,采样算法可选被动采样器或者使用历史测试记录的主动采样器,通过等距的均匀采样或基于霍夫丁不等式计算需要的场景数量确保场景状态子空间被充分覆盖。
15、作为一种优选的改进,所述仿真测试框架包括括仿真器、采样器和判别器,所述仿真器支持自动驾驶系统的接入和对应场景状态的仿真,并且还用于记录车辆状态信息;所述采样器面向场景状态子空间进行采样与搜索,得到测试用例的初始场景状态;所述判别器则基于定义的功能规范判断测试用例是否通过,评估仿真器记录的测试数据,判定测试用例的场景标签。
16、作为一种优选的改进,步骤s4之后还包括如下步骤:采用支持向量机对各个场景状态子空间下的odc边界进行优化,优化的目标函数表示为:
17、argminθμ(tp\fθ(u,c))+w·μ(tn∩fθ(u,c));
18、式中,μ(·)表示风险评估函数,和tn=((u,c)∩φ)-d分别表示真阳性用例和真阴性用例,d代表预测区间,表示对当前到未来时间d步的场景分类的预测;w表示权重;fθ表示分类器;θ表示fθ分类函数的参数;所述目标函数旨在优化分类器参数,从而找到最小化加权假阳性和假阴性用例分类损失的分类边界函数;
19、对负样本进行过采样,并训练支持向量机,找到一个最大化边界的超平面,这个超平面可有效区分正负样本,选择该超平面的边界直接作为场景状态子空间的odc边界,以使风险最小化。
20、作为一种优选的改进,场景状态子空间的odc边界集成通过场景状态子空间的odc边界取交的方式来确定或按照危害事件的风险水平进行加权计算。
21、本发明的有益效果在于:
22、本发明提出的技术方案主要针对高等级自动驾驶系统或车路协同式自动驾驶系统的odc边界构建问题,通过系统性的危害触发条件辨识方法提取关键odc元素,降维场景状态空间,加速odc测试验证流程;基于风险可接受程度评估,对安全场景区间与不安全场景区间进行分类以定义odc边界,提升了边界设计的准确性,进而使得自动驾驶系统可在更广的场景状态空间中连续化运行。
本文地址:https://www.jishuxx.com/zhuanli/20250110/353854.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表