一种轨道交通限界检测方法
- 国知局
- 2025-01-10 13:35:32
本发明涉及限界检测领域,尤其涉及一种轨道交通限界检测方法。
背景技术:
1、铁路运营的范围不断扩大,铁路安全问题日益成为关注的焦点。式中,铁路限界检测作为确保列车运行安全的关键环节,受到了广泛的重视。所谓铁路限界检测,是指在轨道交通运行过程中,确保列车及其载货所需的空间范围不受干扰,包括轨道两侧及上方的安全距离,以防止列车与周围设施、植被及其他列车等发生碰撞。
2、传统的限界检测方法主要依赖于人工检查和定期的机械扫描。这些方法不仅耗时费力,而且检测精度往往不尽如人意。随着计算机视觉和人工智能技术的快速发展,自动化检测技术开始在铁路限界检测中发挥重要作用。通过图像处理和深度学习算法,可以高效、准确地识别和评估铁路限界范围,从而显著提高检测效率和安全性。
3、当前的限界检测技术主要依赖于诸如激光雷达、深度相机和三维激光设备等视觉设备,或者它们的组合。然而,我国的轨道列车数量庞大,大规模应用这些高成本设备将带来巨大的经济成本。因此,寻找一种成本低廉、检测速度快、准确性高且适应性强的限界检测方法,显得尤为重要。
技术实现思路
1、本发明提供了一种轨道交通限界检测方法,以实现有效地检测出轨道交通限界。
2、为了实现上述目的,本发明采取了如下技术方案。
3、根据本发明的一个方面,提供了一种轨道交通限界检测方法,包括:
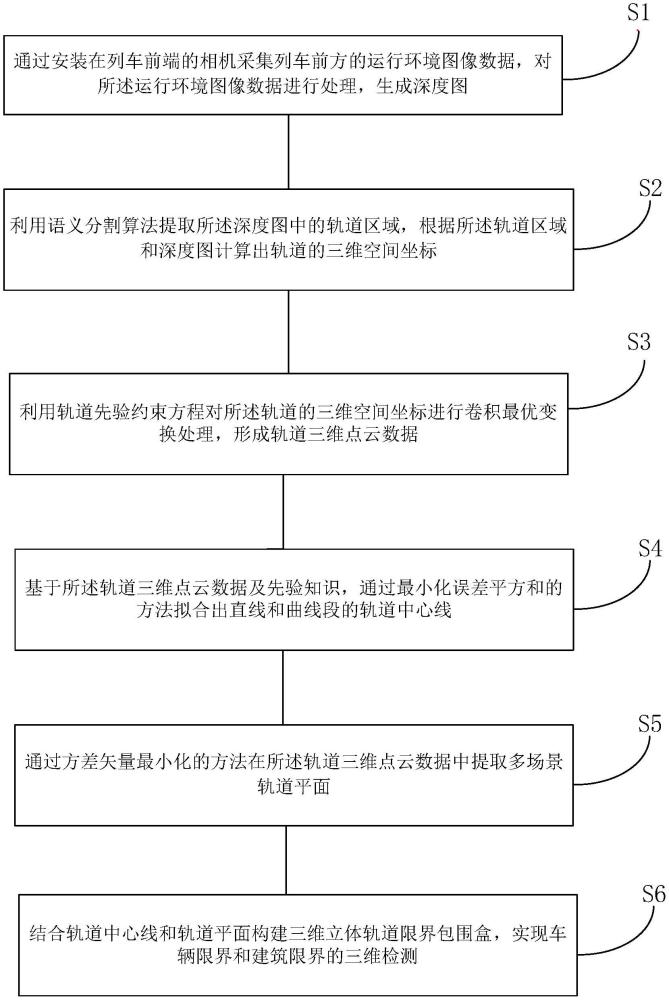
4、通过安装在列车前端的相机采集列车前方的运行环境图像数据,对所述运行环境图像数据进行处理,生成深度图;
5、利用语义分割算法提取所述深度图中的轨道区域,根据所述轨道区域和深度图计算出轨道的三维空间坐标;
6、利用轨道先验约束方程对所述轨道的三维空间坐标进行卷积最优变换处理,形成轨道三维点云数据;
7、基于所述轨道三维点云数据及先验知识,通过最小化误差平方和的方法拟合出直线和曲线段的轨道中心线;
8、通过方差矢量最小化的方法在所述轨道三维点云数据中提取多场景轨道平面;
9、结合轨道中心线和轨道平面构建三维立体轨道限界包围盒,实现车辆限界和建筑限界的三维检测。
10、优选地,所述的通过安装在列车前端的相机采集列车前方的运行环境图像数据,对所述运行环境图像数据进行处理,生成深度图,包括:
11、设置一个黑白间距已知且能够被相机拍摄到的棋盘格图案的标定板,在安装相机前,利用所述标定板标定计算获取相机内参矩阵k、径向畸变系数k1,k2,k3和切向畸变系数p1,p2,内参矩阵k包括焦距(fx,fy)和相机中心对应的像素位置坐标(cx,cy);
12、将标定好的相机安装在列车前端中央位置,列车不断向前方运动,通过相机采集列车前方的运行环境图像数据,设备坐标系设定为:相机设备的坐标为(0,0,0),列车行驶方向为y轴,垂直轨道平面方向为z轴,x轴垂直于平面yoz;
13、选择基于卷积神经网络的单目估计算法对采集的运行环境图像数据进行处理,得到每一帧彩色图像irgb对应的初始深度图dpred;
14、对每一帧深度图dpred和彩色图像irgb,使用深度补全算法生成深度图dcompleted。
15、优选地,所述的利用语义分割算法提取所述深度图中的轨道区域,根据所述轨道区域和深度图计算出轨道的三维空间坐标,包括:
16、使用语义分割算法对所述深度图dcompleted进行处理,分割轨道区域,输出轨道区域的像素坐标(u,v);
17、获取相机的内参矩阵和畸变系数,利用公式(1)对所述轨道区域的像素坐标(u,v)进行去畸变处理,得到校正后的像素坐标(uc,vc);
18、
19、式中,r是径向距离表示点到图像中心的距离,(u,v),(uc,vc)分别是校正前后的像素坐标,(cx,cy)是所述的相机中心对应的像素位置坐标,是内参矩阵k包括的一项参数,k1,k2,k3和p1,p2是所述的径向畸变系数和切向畸变系数;
20、从所述深度图dcompleted中提取与轨道区域的像素坐标对应的深度值d;
21、利用校正后的像素坐标(uc,vc)和对应的深度值d,通过公式(2)计算得到相机坐标系下的轨道三维空间坐标(x,y,z);
22、
23、根据所述运行环境图像数据通过特征点匹配的方法进行视觉里程计计算,以获取相机的外参矩阵[r|t],包括旋转矩阵r和平移向量t;
24、利用相机外参矩阵和所述相机坐标系下的三维空间坐标(x,y,z)通过公式(3)计算得到轨道的世界坐标系下的三维空间坐标(xw,yw,zw);
25、
26、优选地,所述的利用轨道先验约束方程对所述轨道的三维空间坐标进行卷积最优变换处理,形成轨道三维点云数据,包括:
27、将轨道两侧的世界坐标系下的三维空间坐标点数据通过体素化的方法进行左右区域体素划分,得到左轨道体素区域和右轨道体素区域,计算每个体素内点的质心,通过公式(4)构建特定的轨道先验约束方程,过滤掉不符合先验约束的体素区域,对所述三维空间坐标点数据进行卷积最优变换平滑和对齐处理,形成轨道三维点云数据;
28、
29、式中,voxeli表示第i个体素的空间范围,|vi|表示体素内点的数量,表示第i个体素左区域质心,表示第i个体素左区域质心到第i个体素右区域质心的距离计算,w轨是已知的轨道宽度,ε是允许的误差范围。
30、优选地,所述的基于所述轨道三维点云数据及先验知识,通过最小化误差平方和的方法拟合出直线和曲线段的轨道中心线,包括:
31、利用所述轨道三维点云数据获取点云坐标和轨道先验知识,轨道先验知识包括轨道平直性、曲率半径和轨道间距;
32、使用低阶多项式拟合直线段、高阶多项式或特定曲线方程拟合曲线段,通过公式(5)、(6)定义最小化误差平方和函数e,通过公式(7)、(8)确定拟合直线段、曲线段轨道参数,代入公式(5)、(6)拟合出直线和曲线段的轨道中心线,通过使用优化算法,使拟合的曲率接近给定的先验曲率半径,同时保证拟合曲线的间距与轨道设计标准一致;
33、
34、式中,t是参数,(x0,y0,z0)是直线段起点坐标,a,b,c分别表示直线在x,y,z方向上的方向向量分量;
35、
36、式中,f(t)、g(t)、h(t)是x、y、z分量的二次多项式表示;
37、
38、式中,ti是每个点对应的参数t值,(x0,y0,z0)是直线段起点坐标,a,b,c分别表示直线在x,y,z方向上的方向向量分量,f(ti),g(ti),h(ti)是参数ti下对应的拟合曲线的三维坐标。
39、优选地,所述的通过方差矢量最小化的方法在所述轨道三维点云数据中提取多场景轨道平面,包括:
40、利用轨道三维点云数据p,中心化点云数据,计算协方差矩阵;
41、基于协方差矩阵利用公式(9)进行特征值分解,通过方差矢量最小化的方法选取轨道平面的法向量n,利用法向量n通过公式(10)构建多场景轨道平面方程;
42、
43、式中,λi是第i个特征值,vi是第i个特征值对应的特征向量,pi=(xi,yi,zi)是第i个点的坐标,表示中心化点云数据的公式,表示协方差矩阵,通过对所述协方差矩阵进行特征值分解,最小的特征值对应的特征向量为平面的法向量n;
44、利用法向量n通过公式(10)构建多场景轨道平面方程;
45、
46、式中,为法向量n的分量。
47、优选地,所述的结合轨道中心线和轨道平面构建三维立体轨道限界包围盒,实现车辆限界和建筑限界的三维检测,包括:
48、利用轨道中心线和轨道平面方程,定义所述轨道限界包围盒的宽度和高度分别为车辆限界和建筑限界的安全宽度wv、wb和高度hv、hb,并且支持动态调整所述轨道限界包围盒的宽度和高度;
49、利用所述轨道限界包围盒的宽度和高度的信息通过公式(11)、(12)对轨道中心线上的任意一点c(t)=(x(t),y(t),z(t))构建与线路中心线垂直断面的车辆限界和建筑限界的限界框;
50、
51、
52、式中,代表车辆限界x轴方向的正、负半轴的两个端点,代表车辆限界z轴方向的正、负半轴的两个端点,x(t),z(t)是轨道中心线上的任意一点坐标,wv、wb和hv、hb是车辆限界和建筑限界的安全宽度和高度;
53、将所述车辆限界和建筑限界的界框沿轨道平面构建三维立体轨道限界包围盒,实现车辆限界和建筑限界的三维检测。
54、根据本发明的另一个方面,提供了一种轨道交通限界检测装置,包括:深度图生成模块、三维空间坐标计算模块、轨道三维点云数据获取模块、轨道中心线获取模块和轨道限界检测模块;
55、所述的深度图生成模块,用于通过安装在列车前端的相机采集列车前方的运行环境图像数据,对所述运行环境图像数据进行处理,生成深度图;
56、所述的三维空间坐标计算模块,用于利用语义分割算法提取所述深度图中的轨道区域,根据所述轨道区域和深度图计算出轨道的三维空间坐标;
57、所述的轨道三维点云数据获取模块,用于利用轨道先验约束方程对所述轨道的三维空间坐标进行卷积最优变换处理,形成轨道三维点云数据;
58、所述的轨道中心线获取模块,用于基于所述轨道三维点云数据及先验知识,通过最小化误差平方和的方法拟合出直线和曲线段的轨道中心线;
59、所述的轨道平面获取模块,用于通过方差矢量最小化的方法在所述轨道三维点云数据中提取多场景轨道平面;
60、所述的轨道限界检测模块,用于结合轨道中心线和轨道平面构建三维立体轨道限界包围盒,实现车辆限界和建筑限界的三维检测。
61、一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质用于存储计算机指令,所述计算机指令被处理器执行时,实现所述的轨道交通限界检测方法。
62、一种计算机程序产品,包括计算机程序,所述计算机程序当在一个或多个处理器上运行时,用于实现所述的轨道交通限界检测方法。
63、一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现所述的轨道交通限界检测方法。
64、由上述本发明的实施例提供的技术方案可以看出,本发明提供的轨道交通限界检测方法,创新性体现在利用单目深度估计算法和语义分割技术,结合轨道先验知识,通过构建三维点云数据和限界包围盒,实现了对车辆限界和建筑限界的快速检测。该方法不仅降低了检测成本,简化了操作流程,还具备极高的适应性,能够在不同场景和轨道类型下实现高效检测。通过自学习和优化算法,系统能持续提升检测精度,确保轨道交通的运行安全,有效减少事故发生。
65、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20250110/354081.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表