基于惯性参考单元的扰动控制方法及系统
- 国知局
- 2025-01-17 13:07:42
本发明涉及扰动控制领域,尤其涉及一种基于惯性参考单元的扰动控制方法及系统。
背景技术:
1、光电跟瞄系统可以安装于车载、船载、机载、星载等运动平台上。相比于地基式光电跟瞄系统,运动平台上的光电跟瞄系统受运动平台振动的干扰,会导致视轴晃动或抖动,影响跟瞄精度。复合轴跟瞄与惯性参考单元相结合的策略,可以减轻运动平台振动的影响,提升光电跟瞄系统的稳定精度。惯性参考单元是由惯性传感器组成的姿态测量系统,可以为光电跟瞄系统提供相对于惯性空间稳定的参考光束,为有效载荷的目标定位与跟踪提供精确的载体坐标系。
2、但是,在相关的惯性参考单元的扰动控制方法中,由于在控制过程中存在诸多扰动,影响惯性参考单元的精准控制,从而存在跟踪精度较低的不足。
技术实现思路
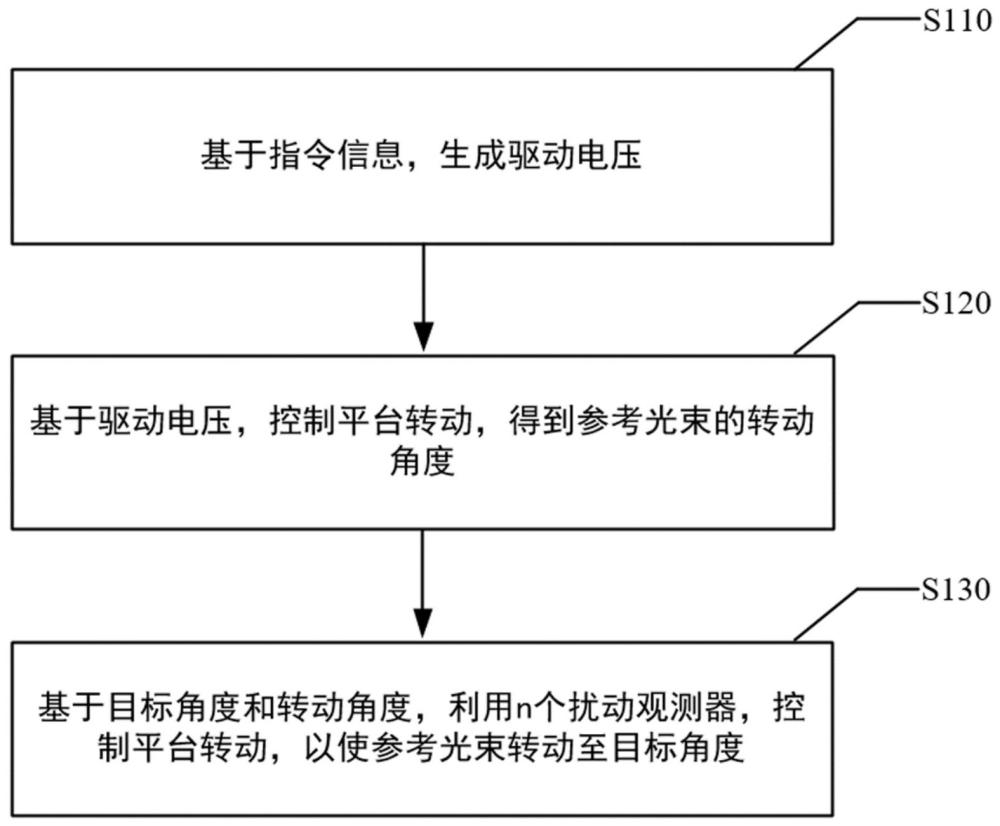
1、有鉴于此,本发明的实施例提供了一种基于惯性参考单元的扰动控制方法,上述惯性参考单元的平台上安装有用于发射参考光束的光源,上述扰动控制方法包括:基于指令信息,生成驱动电压,其中,上述指令信息包括目标角度;基于上述驱动电压,控制上述平台转动,得到上述参考光束的转动角度,其中,上述转动角度与上述目标角度之间存在角度偏差,上述角度偏差是由扰动引起的;基于上述目标角度和上述转动角度,利用n个扰动观测器,控制上述平台转动,以使上述参考光束转动至上述目标角度,其中,n大于或等于2。
2、本发明的实施例还提供了一种基于惯性参考单元的扰动控制系统,包括:惯性参考单元,上述惯性参考单元的平台上安装有用于发射参考光束的光源;控制装置,包括n个扰动观测器和位置环控制器,其中,上述控制装置被配置为基于指令信息,利用上述位置环控制器生成驱动电压,其中,上述指令信息包括目标角度;基于上述驱动电压,利用上述位置环控制器控制上述平台转动,得到上述参考光束的转动角度,其中,上述转动角度与上述目标角度之间存在角度偏差,上述角度偏差是由扰动引起的;基于上述目标角度和上述转动角度,利用上述n个扰动观测器和上述位置环控制器控制上述平台转动,以使上述参考光束转动至上述目标角度,其中,n大于或等于2。
3、根据本发明实施例,通过设置n个扰动观测器,可以抑制不同频率段和/或不同幅值的扰动,从而可以抑制在控制惯性参考单元的过程中存在的多种扰动,可以实现提高惯性参考单元的控制精度的目的。
技术特征:1.一种基于惯性参考单元的扰动控制方法,其特征在于,所述惯性参考单元的平台上安装有用于发射参考光束的光源,所述扰动控制方法包括:
2.根据权利要求1所述的基于惯性参考单元的扰动控制方法,其特征在于,所述基于所述目标角度和所述转动角度,利用n个扰动观测器,控制所述平台转动,以使所述参考光束转动至所述目标角度,包括:
3.根据权利要求2所述的基于惯性参考单元的扰动控制方法,其特征在于,在k小于或等于n的情况下,所述在所述第k个更新轮次中,利用在所述第k-1个更新轮次中确定的转动角度和所述n个扰动观测器中的前m个扰动观测器,确定在所述第k个更新轮次中更新的驱动电压,包括:
4.根据权利要求3所述的基于惯性参考单元的扰动控制方法,其特征在于,还包括:
5.根据权利要求4所述的基于惯性参考单元的扰动控制方法,其特征在于,还包括:
6.根据权利要求2所述的基于惯性参考单元的扰动控制方法,其特征在于,在k大于n的情况下,所述在所述第k个更新轮次中,利用在所述第k-1个更新轮次中确定的转动角度和所述n个扰动观测器中的前m个扰动观测器,确定在所述第k个更新轮次中更新的驱动电压,包括:
7.根据权利要求3所述的基于惯性参考单元的扰动控制方法,其特征在于,所述基于在所述第k-1个更新轮次中确定的转动角度和在所述第k-1个更新轮次中确定的第一电压,利用第m个扰动观测器,确定第一扰动估计值,包括:
8.根据权利要求6所述的基于惯性参考单元的扰动控制方法,其特征在于,所述扰动观测器包括第一扰动观测器和至少一个第二扰动观测器,所述第一扰动观测器中滤波器的抑制频段的宽于所述第二扰动观测器中滤波器的抑制频段,且所述第一扰动观测器中所述滤波器的抑制幅值在所述第二扰动观测器的抑制频段内低于所述第二扰动观测器中所述滤波器的抑制幅值。
9.一种基于惯性参考单元的扰动控制系统,其特征在于,包括:
10.根据权利要求9所述的基于惯性参考单元的扰动控制系统,其特征在于,还包括:
技术总结本发明提供了一种基于惯性参考单元的扰动控制方法及系统,惯性参考单元的平台上安装有用于发射参考光束的光源,扰动控制方法包括:基于指令信息,生成驱动电压,其中,指令信息包括目标角度;基于驱动电压,控制平台转动,得到参考光束的转动角度,其中,转动角度与目标角度之间存在角度偏差,角度偏差是由扰动引起的;基于目标角度和转动角度,利用n个扰动观测器,控制平台转动,以使参考光束转动至目标角度,其中,n大于或等于2。技术研发人员:李醒飞,何梦洁,拓卫晓,王天宇受保护的技术使用者:天津大学技术研发日:技术公布日:2025/1/13本文地址:https://www.jishuxx.com/zhuanli/20250117/356251.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表