1.本实用新型涉及一种秋千,尤其涉及一种采用电磁力作为辅助动力的秋千。
背景技术:
2.现有技术中的秋千,参见授权公告号为cn205340102u所公开的秋千,在秋千摆动过程中始终需要人力提供动力以维持秋千的摆动。现有技术中的秋千占据人力时间长,效率低下,使用不便。
技术实现要素:
3.本实用新型的目的是提供一种采用电磁力作为辅助动力的动秋千。
4.为达到上述目的,本实用新型采用的技术方案是:一种秋千,包括:
5.主支架;
6.摆杆,所述摆杆的上端部与所述主支架转动地连接;
7.座椅,所述座椅设置于所述摆杆的下部;
8.驱动机构,所述驱动机构用于驱动所述摆杆相对所述主支架摆动,
9.所述驱动机构包括:
10.磁感件,所述磁感件设置于所述摆杆上或所述座椅上;
11.线圈组件,所述线圈组件设置于所述主支架上;
12.摇摆控制传感器,所述摇摆控制传感器设于所述摆杆的摆动方向上;
13.摇摆控制电路,所述摇摆控制电路的输入端连接所述摇摆控制传感器的信号输出端,所述摇摆控制电路的输出端连接所述线圈组件的电流输入端。
14.优选地,所述磁感件位于所述摆杆或所述座椅的正下方,当所述摆杆向前或向后摆动时,所述磁感件进入所述线圈组件内。
15.进一步优选地,所述磁感件包括沿上下方向延伸的上杆体,以及位于上杆体下部且沿前后方向延伸的下杆体,所述下杆体在所述摆杆的摆动过程中能够进入所述线圈组件内。
16.优选地,所述摇摆控制电路用于比较所述摇摆控制传感器的输出信号与预设值并输出控制信号至所述线圈组件,若所述摇摆控制传感器的输出信号超出预设值范围,则所述摇摆控制电路控制所述线圈组件处于通电状态,若所述摇摆控制传感器的输出信号未超出预设值范围,则所述摇摆控制电路控制所述线圈组件处于断电状态。
17.优选地,所述摆杆的上端部开设有弧形限位槽,所述弧形限位槽的圆心位于所述摆杆与所述支架的转动轴线上,所述支架上设置有限位销,所述限位销插在所述弧形限位槽内,当所述摆杆摆动至前极限位置时,所述限位销与所述弧形限位槽的前侧内端面相接触;当所述摆杆摆动至后极限位置时,所述限位销与所述弧形限位槽的后侧内端面相接触。
18.进一步地,所述摆杆包括左侧摆杆、右侧摆杆,以及连接所述左侧摆杆的下端部和所述右侧摆杆的下端部的横连杆,所述磁感件固定地设置在所述横连杆的中部。
19.进一步地,所述左侧摆杆与所述右侧摆杆在左右方向上的间距小于所述主支架在左右方向上的宽度。
20.作为一种优选的实施方式,所述主支架包括:前支架、后支架,以及固定地连接在所述前支架的下部和所述后支架的下部之间的支撑板,所述前支架的上部与所述后支架的上部固定地连接。
21.进一步地,所述前支架呈向上开口的u形,所述后支架呈向上开口的u形,所述主支架还包括设于所述前支架的底部的前支脚,以及设于所述后支架的底部的后支脚。
22.进一步优选地,所述支撑板位于所述摆杆的下方,所述支撑板位于所述摆杆的下方,所述线圈组件安装在所述支撑板内且位于所述支撑板的后方,所述摇摆控制传感器设于所述支撑板内且位于所述摆杆或所述座椅在静止状态时的正下方。
23.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:本实用新型秋千在摆动过程中不需要人力维持摆动,效率高,实用方便。
附图说明
24.附图1为本实用新型的秋千的三维立体图;
25.附图2为本实用新型秋千的内部结构示意图;
26.附图3为本实用新型秋千的下视图;
27.附图4为对应附图3中a
‑
a的本实用新型秋千摆动至中间位置时的剖视图一;
28.附图5为对应附图3中a
‑
a的本实用新型秋千向前摆动时的剖视图二;
29.附图6为对应附图3中a
‑
a的本实用新型秋千向后摆动时的剖视图三;
30.附图7为本实用新型秋千中磁感件与线圈组件的结构示意图一;
31.附图8为本实用新型秋千中磁感件与线圈组件的结构示意图二;
32.附图9为本实用新型秋千中驱动机构的工作原理示意图;
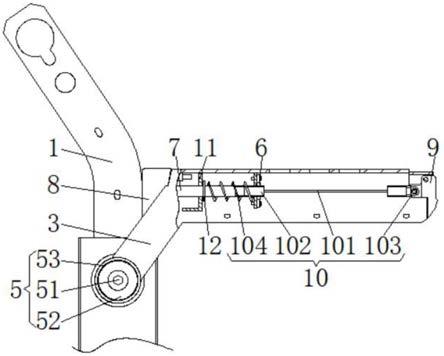
33.附图10为本实用新型秋千的转轴位置的局部放大示意图一;
34.附图11为对应附图10的本实用新型秋千的转轴二位置的局部放大示意图二;
35.其中:1、主支架;11、前支架;12、后支架;13、支撑板;14、前支脚;15、后支脚;16、限位销;17、弧形限位槽;
36.2、摆杆;21、左侧摆杆;22、右侧摆杆;23、横连杆;
37.3、座椅;
38.4、驱动机构;5、磁感件;6、线圈组件;7、摇摆控制传感器;8、摇摆控制电路;
39.100、转轴。
具体实施方式
40.下面结合附图和具体的实施例来对本实用新型的技术方案作进一步的阐述。
41.以下关于上、下、左、右、前、后等方位词,均是按照儿童乘坐在该秋千上时观察到的方位进行参考定义的。
42.一种秋千,参见图1至图3所示,包括:
43.主支架1;
44.摆杆2,摆杆2的上端部与主支架1转动地连接;
45.座椅3,座椅3设置于摆杆2的下部;
46.驱动机构4,驱动机构4用于驱动摆杆2相对主支架1摆动,
47.驱动机构4包括:
48.磁感件5,磁感件5设置于摆杆2上或座椅3上;
49.线圈组件6,线圈组件6设置于主支架1上;
50.摇摆控制传感器7,摇摆控制传感器7设于摆杆2的摆动方向上;
51.摇摆控制电路8,摇摆控制电路8的输入端连接摇摆控制传感器7的信号输出端,摇摆控制电路8的输出端连接线圈组件6的电流输入端。
52.磁感件5位于摆杆2或座椅3的正下方,当摆杆2向前或向后摆动时,磁感件5进入线圈组件6内。磁感件5包括沿上下方向延伸的上杆体,以及位于上杆体下部且沿前后方向延伸的下杆体,下杆体在摆杆2的摆动过程中能够进入线圈组件6内。
53.摆杆2包括左侧摆杆21、右侧摆杆22,以及连接左侧摆杆21的下端部和右侧摆杆22的下端部的横连杆23,磁感件5固定地设置在横连杆23的中部。左侧摆杆21与右侧摆杆22在左右方向上的间距小于主支架1在左右方向上的宽度。上述设置使得摆杆2在摆动过程中能够避免与主支架1发生碰撞,保障了秋千在使用过程中的安全性。
54.摇摆控制电路8用于比较摇摆控制传感器7的输出信号与预设值并输出控制信号至线圈组件6,若摇摆控制传感器7的输出信号超出预设值范围,摇摆控制电路8基于比较来产生第一信号,第一信号使得电流被提供至线圈组件6,线圈组件6通电后产生作用于磁感件5的排斥磁性力,排斥磁性力使得摆杆向前或向后摆动;若摇摆控制传感器7的输出信号未超出预设值范围,摇摆控制电路8基于比较来产生第二信号,第二信号使得电流被停止提供至线圈组件6,线圈组件6作用于磁感件5的排斥磁性力消失。
55.具体到本实施例中,参见图4至图9所示,当摆杆2向后摆动至位于其底部的磁感件5被摇摆控制传感器7检测到,摇摆控制传感器7产生信号并将信号输入摇摆控制电路8,摇摆控制电路8产生第一信号,第一信号使得电流被提供至线圈组件6,线圈组件6通电后产生作用于磁感件5的排斥磁性力。此时,排斥磁性力对摆杆2做负功,摆杆2在向后摆动过程中速度逐渐降低。至摆杆2向后摆动的速度为零后,排斥磁性力开始对摆杆2做正功,摆杆2转而向前摆动。当摆杆2向前摆动至位于其底部的磁感件5被摇摆控制传感器7检测到,摇摆控制传感器7产生信号并将信号输入摇摆控制电路8,摇摆控制电路8产生第二信号,第二信号使得电流被停止提供至线圈组件6,线圈组件6作用于磁感件5的排斥磁性力消失。摆杆2向前摆动过程中,摆杆2的自身重力对摆杆2做负功,摆杆2向前摆动的速度逐渐降低。至摆杆2向前摆动的速度为零后,摆杆2的自身重力对摆杆2做正功,摆杆2转而向后摆动。此过程循环进行,摆杆2得以保持前后向的往复摆动。
56.主支架1包括:前支架11、后支架12,以及固定地连接在前支架11的下部和后支架12的下部之间的支撑板13。具体到本实施例中,前支架11自下向上地倾斜向后延伸,前支架12自下向上地倾斜向前延伸,前支架11的上部与后支架12的上部通过转轴100固定地连接。上述设置使得前支架11与后支架12形成稳固的支撑结构,提高了秋千在使用过程中的安全性。
57.摆杆2绕转轴100转动地连接在主支架1的上部。前支架11呈向上开口的u形,后支架12呈向上开口的u形,主支架1还包括设于前支架11的底部的前支脚14,以及设于后支架
12的底部的后支脚15。前支脚14与后支脚15进一步形成了对主支架1的稳固支撑,提高了秋千在使用过程中的安全性。
58.本实施例中,参见图10和图11所示,摆杆2的上端部开设有弧形限位槽17,弧形限位槽17位于转轴100的下方,弧形限位槽17的圆心位于转轴100的转动轴线上,支架1上设置有限位销16,限位销16插设在弧形限位槽17内,当摆杆2摆动至前极限位置时,限位销16与弧形限位槽17的前侧内端面相接触;当摆杆2摆动至后极限位置时,限位销16与弧形限位槽17的后侧内端面相接触。弧形限位槽17与限位销16的设置限制了摆杆2在前后方向的摆动幅度,进而有效地消除了秋千摆动过程中由于驱动机构4的故障而可能发生的安全隐患。
59.具体到本实施例中,支撑板13位于摆杆2的下方,线圈组件6安装在支撑板13内且位于支撑板13的后方。摇摆控制传感器7设于支撑板13内且位于摆杆2或座椅3在静止状态时的正下方。将线圈组件6安装在支撑板13内可以防止通电后的线圈组件6对人员安全造成伤害。将摇摆控制传感器7设于支撑板13内可以有效防止摇摆控制传感器7受到外部损坏,并且为摇摆控制传感器7设置相对隔离的工作空间有利于去除干扰,提高摇摆控制传感器7的检测准确性。
60.以下具体阐述下本实施例的工作过程:
61.秋千在摆动过程中,当摆杆2向后摆动至被摇摆控制传感器7检测到,线圈组件6在摇摆控制电路8的控制下通电,通电后的线圈组件6产生排斥磁感力,排斥磁感力对向后摆动的摆杆2做负功,摆杆2逐渐停止向后摆动。之后,排斥磁感力对摆杆2做正功,摆杆2开始向前摆动。当摆杆2向前摆动至被摇摆控制传感器7检测到,线圈组件6在摇摆控制电路8的控制下断电,排斥磁感力消失。摆杆2的自身重力对向前摆动的摆杆2做负功,摆杆2逐渐停止向前摆动。随后,摆杆2的自身重力对摆杆2做正功,摆杆2开始向后摆动。上述过程循环,摆杆2得以持续地做前后方向的往复摆动。
62.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。