-
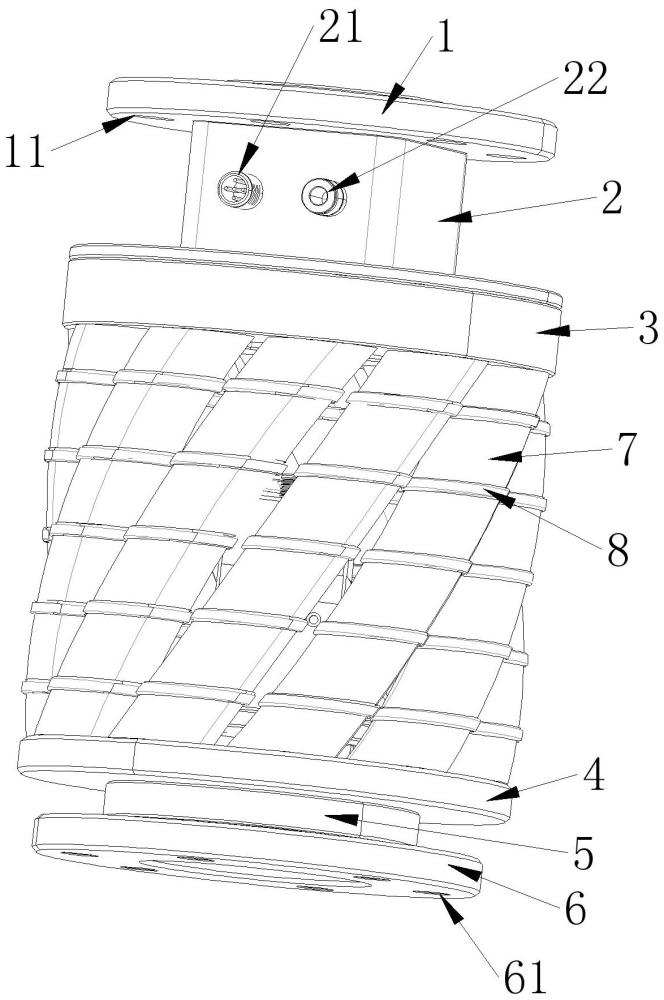
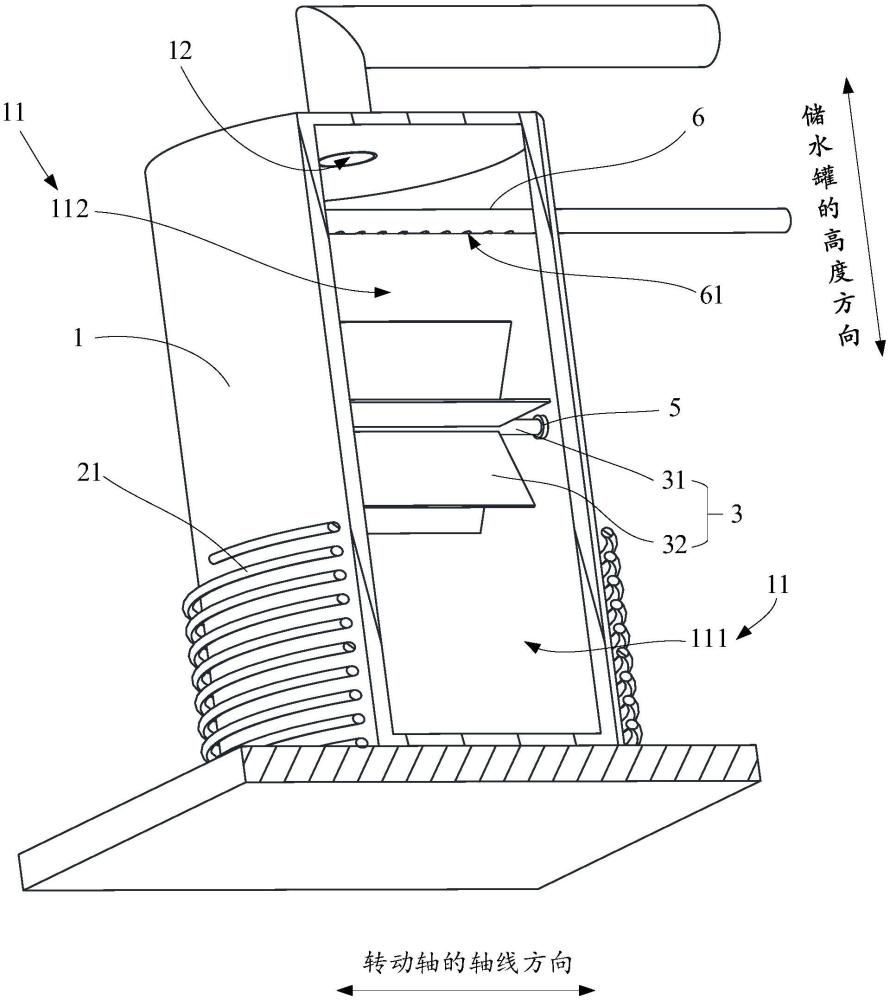
柔性自适应力控接触装置
本发明涉及机器人力控,具体而言,涉及一种柔性自适应力控接触装置。背景技术:1、机器人自动化作业在工业生产中越发重要,尤其是涉及表面处理(例如研磨、抛光)等接触性作业。传统的表面处理通常依靠人工手持工具......
技术新讯 > 适应力 > 列表
 2024-06-20
2024-06-20精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01