柔性自适应力控接触装置
- 国知局
- 2024-06-20 15:23:44
本发明涉及机器人力控,具体而言,涉及一种柔性自适应力控接触装置。
背景技术:
1、机器人自动化作业在工业生产中越发重要,尤其是涉及表面处理(例如研磨、抛光)等接触性作业。传统的表面处理通常依靠人工手持工具对工件表面进行加工,人工处理的方式不受工件表面形状的影响,任何位置都具有良好的适应性,但是人工加工质量完全由作业人员的经验决定。表面处理过程中需要避免工件受力不均匀,要求作业人员每时每刻都保持对工件施加恒定的压力是十分困难的,并且人工处理效率较低,不利于提高生产力,同时加工过程中产生的粉尘等污染物对人体有害,因此目前开始以机器人替代人工进行表面处理等接触性作业。
2、工业机器人在进行自动化磨抛时,主要是将磨抛工具安装于机器人末端,机器人按特定轨迹运动,带动磨抛工具与待加工表面进行接触,以此来去除工件表面材料达到磨抛的目的。在实际加工过程中,由于机器人的控制精度、磨抛工具的安装精度、工件表面曲率变化等问题都有可能导致工具与工件表面产生欠接触或过接触,两种情况都会影响接触力的均匀性,严重影响工件加工效果,尤其在过接触状态,微小的位移下,工件和磨抛工具间会产生较大的冲击力,使得工件切削量变大,破坏工件表面,严重时甚至会损坏工业机器人。因此,在机器人进行接触作业时,对机器人末端进行受力控制是十分必要的,通常是在机器人末端与末端工具之间增加一个力控装置以此来避免上述的欠接触和过接触情况,实现加工过程中接触力的精确控制。
3、目前主要使用的力控装置分为主动柔顺装置和被动柔顺装置两种,申请号为201711388747.9的专利申请公布了一种伺服补偿恒力执行机构,该机构属于主动柔顺装置,由电机、弹簧等部件组成,其利用机械插补的方法能够实现一个自由度方向上力的主动调节,但是对于曲面不规则表面没有足够的适应性,完全依靠机器人轨迹算法,在实际加工过程中,控制难度大,精度较低,在进行非金属磨抛时容易产生边缘应力,影响磨抛质量。申请号为202111316621.7的专利申请公布了一种多自由度力控减振装置,该装置拥有多个自由度,对曲面能进行主动适应,并主动进行接触力调节,但是该装置完全由刚性部件组成,在接触工件表面时可近似为刚性接触,姿态和力的调节完全由控制算法决定,控制难度较大,没有容错率,当反应速度稍慢一点,都可能导致工件表面受到损坏。申请号为201810665628.1的专利申请公布了一种用于机器人力控的多方向被动柔顺装置,该装置能够被动的适应工件表面形状,且控制要求低,但是该装置不能主动调节接触力,由于其内部弹性元件的弹性模量固定,则接触力大小完全由内部弹性元件的压缩程度所决定,不利于复杂工件和不同工作情况下使用。
技术实现思路
1、本发明的目的包括提供了一种柔性自适应力控接触装置,其运用在柔性力控场景下能够实现加工工具与待加工件的柔性接触,并精准控制加工工具对待加工件的接触力。
2、本发明的实施例可以这样实现:
3、本发明提供一种柔性自适应力控接触装置,柔性自适应力控接触装置包括:
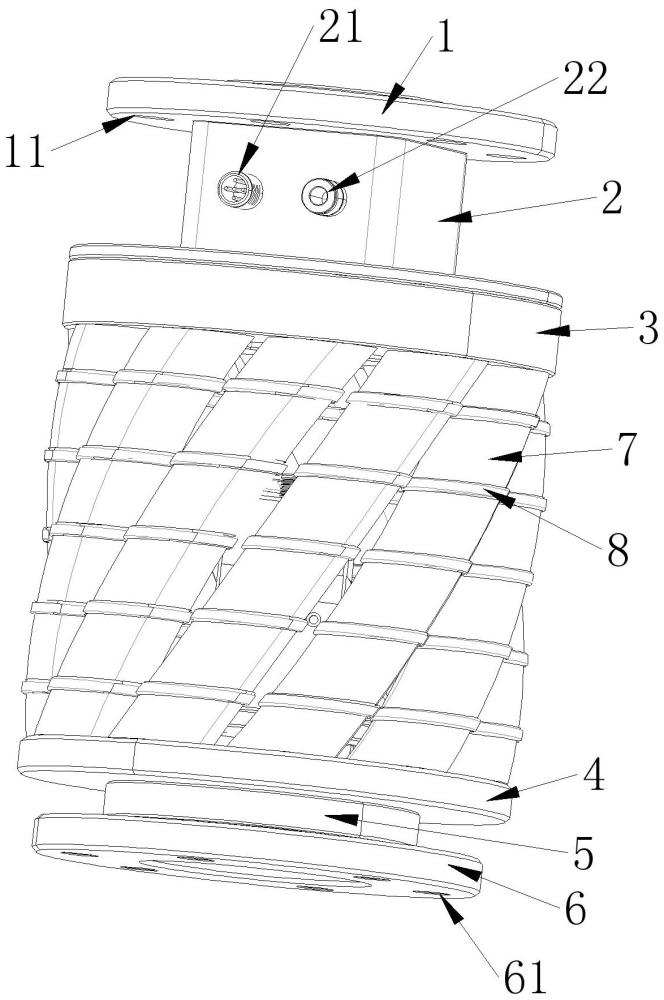
4、中空腔体,上开设有入口和出口,入口用于通入压力流体;
5、活动端部,与中空腔体间隔设置;
6、多个柔性管体,设置在中空腔体与活动端部之间,柔性管体连通到中空腔体的出口;
7、工具连接端,连接在活动端部远离柔性管体的一侧,工具连接端用于安装加工工具;
8、多个阵列布置的柔性管体用于在通入压力流体的情况下,在与工具连接端的受力作用下,造成装置的自适应变形,自适应变形包括伸展、收缩、旋转或摆动。
9、在可选的实施方式中,柔性自适应力控接触装置还包括:
10、传感器设备,用于实时采集待加工工件或本装置的状态参数;
11、控制阀,用于根据状态参数对进入中空腔体内的压力流体进行调压,从而控制柔性管体的形变量。
12、在可选的实施方式中,中空腔体上靠近柔性管体的一侧表面上开设有阵列排布的出口,出口与柔性管体一一对应连通。
13、在可选的实施方式中,柔性管体的轴线相对于竖直方向倾斜设置,柔性管体的轴线的倾斜方向为中空腔体的周向。
14、在可选的实施方式中,柔性管体的轴线为直线或曲线。
15、在可选的实施方式中,柔性自适应力控接触装置还包括:
16、径向约束件,安装在柔性管体上,径向约束件用于限制柔性管体沿径向变形。
17、在可选的实施方式中,柔性自适应力控接触装置还包括:
18、外接部,开设有电气接口和流体接口,电气接口用于连接电源和控制器,电源用于给传感器设备和控制阀供电,控制器用于接收传感器设备的力学信号,并控制控制阀,流体接口用于连接压力流体的供应设备,并将压力流体输送至控制阀。
19、在可选的实施方式中,传感器设备为力学传感器、形变传感器或气压传感器。
20、在可选的实施方式中,控制阀用于控制加工工具对待加工工件施加的力保持恒定,或者控制柔性管体中压力流体的压力保持恒定。
21、在可选的实施方式中,控制柔性管体通入的流体压力,在工具连接端的受到反作用力下,柔性管体以及工具连接端自适应旋转。
22、本发明实施例提供的柔性自适应力控接触装置的有益效果包括:
23、1.通过在中空腔体与活动端部之间设置多个柔性管体,通过中空腔体向柔性管体内充入或抽出压力流体,就可以控制柔性管体的形变,实现工具连接端上加工工具对待加工件的接触力的精准控制;
24、2.在需要加工工具对待加工件的接触力保持恒定的情况下,就可以在传感器设备的实时监测下,实时控制柔性管体内压力流体的量,保证加工工具对待加工件的接触力保持恒定;
25、3.布置多个柔性管体可以实现对活动端部以及工具连接端均匀施力,在打磨抛光领域,可以降低加工工具对待加工件的边缘应力影响,提高磨抛质量;
26、4.柔性管体可以依靠自身弹性自适应待加工件的表面形状,提高加工质量,还能起到良好的缓冲作用,保护工业机器人和待加工件。
技术特征:1.一种柔性自适应力控接触装置,其特征在于,所述柔性自适应力控接触装置包括:
2.根据权利要求1所述的柔性自适应力控接触装置,其特征在于,所述柔性自适应力控接触装置还包括:
3.根据权利要求1所述的柔性自适应力控接触装置,其特征在于,所述中空腔体(3)上靠近所述柔性管体(7)的一侧表面上开设有阵列排布的所述出口(31),所述出口(31)与所述柔性管体(7)一一对应连通。
4.根据权利要求1所述的柔性自适应力控接触装置,其特征在于,所述柔性管体(7)的轴线相对于竖直方向倾斜设置,所述柔性管体(7)的轴线的倾斜方向为所述中空腔体(3)的周向。
5.根据权利要求4所述的柔性自适应力控接触装置,其特征在于,所述柔性管体(7)的轴线为直线或曲线。
6.根据权利要求1所述的柔性自适应力控接触装置,其特征在于,所述柔性自适应力控接触装置还包括:
7.根据权利要求2所述的柔性自适应力控接触装置,其特征在于,所述柔性自适应力控接触装置还包括:
8.根据权利要求2所述的柔性自适应力控接触装置,其特征在于,所述传感器设备(5)为力学传感器、形变传感器或气压传感器。
9.根据权利要求2所述的柔性自适应力控接触装置,其特征在于,所述控制阀(10)用于控制所述加工工具对所述待加工工件施加的力保持恒定,或者控制所述柔性管体(7)中压力流体的压力保持恒定。
10.根据权利要求5所述的柔性自适应力控接触装置,其特征在于,控制所述柔性管体(7)通入的流体压力,在所述工具连接端(6)的受到反作用力下,所述柔性管体(7)以及所述工具连接端(6)自适应旋转。
技术总结本发明提供一种柔性自适应力控接触装置,涉及机器人力控技术领域。柔性自适应力控接触装置包括中空腔体、活动端部、工具连接端和多个柔性管体;中空腔体上开设有入口和出口,入口用于通入压力流体;多个柔性管体设置在中空腔体与活动端部之间,柔性管体连通到中空腔体的出口;工具连接端连接在活动端部远离柔性管体的一侧,工具连接端用于安装加工工具;多个阵列布置的柔性管体用于在通入压力流体的情况下,在与工具连接端的受力作用下,造成装置的自适应变形,自适应变形包括伸展、收缩、旋转或摆动。柔性自适应力控接触装置运用在在柔性力控场景下能够实现加工工具与待加工件的柔性接触,并精准控制加工工具对待加工件的接触力。技术研发人员:罗华,段必成,彭宇翔,赵怀宇,刁燕,吴晓东受保护的技术使用者:四川大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240619/12021.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表