1.本发明涉及一种无人机路径规划方法。
背景技术:
2.在无人机实际飞行过程中,从上一个任务点到下个任务点内的路径并不是直线飞行,空域内存在各种的障碍点及威胁,如果为了躲避威胁绕一大圈又浪费了无人机的航程,因此针对这种路径规划问题,可将问题简化为如何寻找一条避开所有威胁和障碍的无人机两点间的最短路径问题。最短路径问题是图论研究中的一个经典算法问题,即旨在找出图中两节点之间总代价最低的路径。最短路径问题是交通网络分析中的一个重要问题,也是地理信息系统中的一个研究热点。该问题描述简单、易于理解,如何避开障碍点并寻找一条最短路径成了问题的关键,引入voronoi图的方法,将障碍物设为voronoi图多边形的中心合理避开,通过dijkstra算法求出最短路径来解决该问题就有了很大的实际意义。
技术实现要素:
3.发明目的:为解决背景技术中存在的技术问题,本发明提出一种无人机路径规划方法,包括以下步骤:
4.步骤1,设定无人机需要执行的任务点为从点a到点b,按照voronoi图方法生成包围住障碍点的多边形;
5.步骤2,将多边形顶点坐标筛选;
6.步骤3,从a点开始,依次向外探寻最短路径。
7.步骤1包括:从点a到点b有n个障碍点,n取值为自然数,按照voronoi图方法生成包围住障碍点的多边形,多边形的顶点是无人机在路径规划时能够途径的点,求出多边形顶点坐标,坐标是连接两邻点直线垂直平分线组成的连续多边形的顶点。
8.步骤2包括:剔除无穷远点,生成多边形顶点之间的距离矩阵,没有连接的多边形顶点之间的距离设为无穷大,距离矩阵中每个顶点最多也只与3个顶点相连接;寻找在a、b点附近最近的三个顶点,与a点最近的三个顶点记为:点1、点2、点3,与b点最近的三个顶点记为:点13、点14、点18;
9.将点1、点2、点3计算出的连线距离及与点13、点14、点18计算出的连线距离分别加入到a、b两点的距离矩阵行中。
10.步骤3包括:把顶点集合v分成两组,第一组为已求出最短路径的顶点集合s,初始时集合s中只有一个源点a,以后每求得一条最短路径,就将求得的最短路径的顶点加入到集合s中,直到全部顶点都加入到集合s中;第二组为其余未确定最短路径的顶点集合u,按最短路径按长度的递增次序依次把第二组的顶点加入集合s中,在加入的过程中,总保持从源点a到集合s中各顶点的最短路径长度不大于从源点a到集合u中任何顶点的最短路径长度;
11.每个顶点对应一个距离,集合s中的顶点的距离就是从a到顶点的最短路径长度;
集合u中的顶点的距离,是从a到顶点只包括集合s中的顶点为中间顶点的当前最短路径长度,最后输出从a点到b点的最短路线和途径顶点。
12.有益效果:本发明提供了一种无人机在两点之间飞行时,如何巧妙地避开障碍点并以最短路径到达下一任务点的飞行路径方法,为后续在多机避障飞行和任务规划奠定基础。
附图说明
13.下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述和/或其他方面的优点将会变得更加清楚。
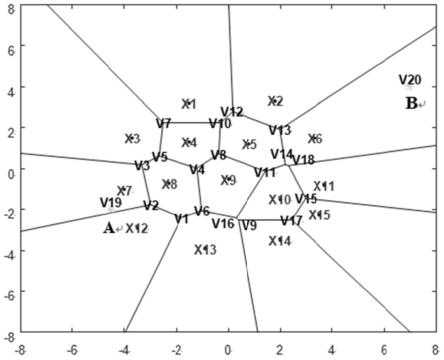
14.图1是dijkstra算法解决无人机两点间避障的最短的飞行路径示意图。
具体实施方式
15.本发明提供了一种无人机路径规划方法,引入voronoi图的方法,将障碍物设为voronoi图多边形的中心从而合理避开障碍,通过dijkstra算法思想求出两任务点之间的最短路径:
16.步骤1:设定无人机需要执行的任务点为从点a到点b,从点a到点b有n个障碍点,n取值为自然数,按照voronoi图方法生成包围住障碍点的多边形,多边形的顶点是无人机在路径规划时能够途径的点,求出多边形顶点坐标,坐标是连接两邻点直线垂直平分线组成的连续多边形的顶点;如图1所示。
17.图中红色的点就是障碍点,蓝色的点是无人机需要执行的任务点a、b,按照voronoi图方法生成包围住障碍点的多边形,多边形的顶点是无人机在路径规划时可以途径的点(由于说明书附图只能是灰度图,因此图中看不出颜色区别,特此说明,x1、x2。。。是红色的障碍点,v1、v2。。。是包围住障碍点的多边形的顶点)。
18.步骤2:将多边形顶点坐标筛选,剔除无穷远点,生成多边形顶点之间的距离矩阵,没有连接的多边形顶点之间的距离设为无穷大,距离矩阵中每个顶点最多也只与3个顶点相连接;寻找在a、b点附近最近的三个顶点,与a点最近的三个顶点记为:点1、点2、点3,与b点最近的三个顶点记为:点13、点14、点18;
19.将点1、点2、点3计算出的连线距离及与点13、点14、点18计算出的连线距离分别加入到a、b两点的距离矩阵行中;
20.步骤3:引入dijkstra算法思想,从a点开始,依次向外探寻最短路径。把图中顶点集合v分成两组,第一组为已求出最短路径的顶点集合(用s表示,初始时s中只有一个源点a,以后每求得一条最短路径,就将求得的最短路径的顶点加入到集合s中,直到全部顶点都加入到s中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用u表示),按最短路径长度的递增次序依次把第二组的顶点加入s中。在加入的过程中,总保持从源点a到s中各顶点的最短路径长度不大于从源点a到u中任何顶点的最短路径长度。此外,每个顶点对应一个距离,s中的顶点的距离就是从a到此顶点的最短路径长度,u中的顶点的距离,是从a到此顶点只包括s中的顶点为中间顶点的当前最短路径长度,最后输出从a点到b点的最短路线和途径顶点。根据上述步骤求解出从a点到b点之间的避开障碍物的路线:a-v1-v6-v16-v11-v14-b,从而寻找出了a-b之间的无人机的可行路径(由于说明书附图只能是灰度
图,因此无法看出图中颜色,特此说明)。
21.本发明提供了一种无人机路径规划方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
技术特征:
1.一种无人机路径规划方法,其特征在于,包括以下步骤:步骤1,设定无人机需要执行的任务点为从点a到点b,按照voronoi图方法生成包围住障碍点的多边形;步骤2,将多边形顶点坐标筛选;步骤3,从a点开始,依次向外探寻最短路径。2.根据权利要求1所述的一种无人机路径规划方法,其特征在于,步骤1包括:从点a到点b有n个障碍点,n取值为自然数,按照voronoi图方法生成包围住障碍点的多边形,多边形的顶点是无人机在路径规划时能够途径的点,求出多边形顶点坐标,坐标是连接两邻点直线垂直平分线组成的连续多边形的顶点。3.根据权利要求2所述的一种无人机路径规划方法,其特征在于,步骤2包括:剔除无穷远点,生成多边形顶点之间的距离矩阵,没有连接的多边形顶点之间的距离设为无穷大,距离矩阵中每个顶点最多也只与3个顶点相连接;寻找在a、b点附近最近的三个顶点,与a点最近的三个顶点记为:点1、点2、点3,与b点最近的三个顶点记为:点13、点14、点18;将点1、点2、点3计算出的连线距离及与点13、点14、点18计算出的连线距离分别加入到a、b两点的距离矩阵行中。4.根据权利要求3所述的一种无人机路径规划方法,其特征在于,步骤3包括:把顶点集合v分成两组,第一组为已求出最短路径的顶点集合s,初始时集合s中只有一个源点a,以后每求得一条最短路径,就将求得的最短路径的顶点加入到集合s中,直到全部顶点都加入到集合s中;第二组为其余未确定最短路径的顶点集合u,按最短路径按长度的递增次序依次把第二组的顶点加入集合s中,在加入的过程中,总保持从源点a到集合s中各顶点的最短路径长度不大于从源点a到集合u中任何顶点的最短路径长度;每个顶点对应一个距离,集合s中的顶点的距离就是从a到顶点的最短路径长度;集合u中的顶点的距离,是从a到顶点只包括集合s中的顶点为中间顶点的当前最短路径长度,最后输出从a点到b点的最短路线和途径顶点。
技术总结
本发明提供了一种无人机路径规划方法,包括以下步骤:步骤1,设定无人机需要执行的任务点为从点A到点B,按照voronoi图方法生成包围住障碍点的多边形;步骤2,将多边形顶点坐标筛选;步骤3,从A点开始,依次向外探寻最短路径。本发明提供了一种无人机在两点之间飞行时,如何巧妙地避开障碍点并以最短路径到达下一任务点的飞行路径方法,为后续在多机避障飞行和任务规划奠定基础。任务规划奠定基础。任务规划奠定基础。
技术研发人员:张田 张振兴
受保护的技术使用者:中国人民解放军总参谋部第六十研究所
技术研发日:2022.02.18
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。