技术特征:
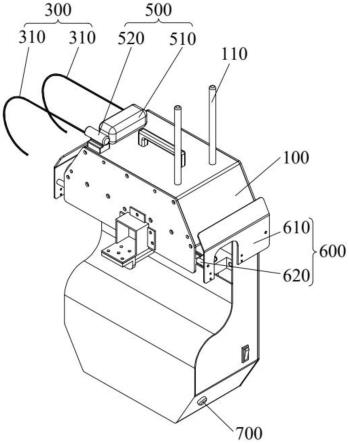
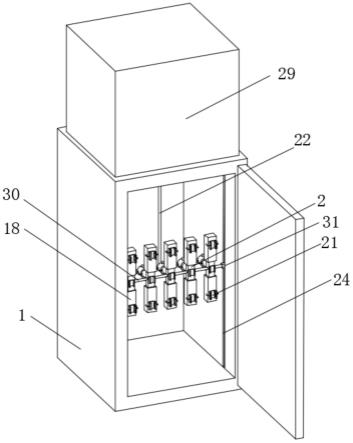
1.一种高空巡线机器人,其特征在于,包括壳体(100)和设置于所述壳体(100)上的移动模块(200)、异物清除模块(300)、移动控制模块(400)、观察模块(500)和控制器;其中,所述移动模块(200)能使所述壳体(100)支撑于线缆上并驱使所述壳体(100)沿所述线缆的长度方向移动;所述异物清除模块(300)包括设置于所述壳体(100)上的挂钩(310),所述挂钩(310)用于钩取并清除所述线缆上的异物;所述移动控制模块(400)与所述控制器通讯连接,所述控制器能够控制所述移动控制模块(400),以使所述移动控制模块(400)控制所述移动模块(200)以驱使所述壳体(100)沿所述线缆的长度方向移动;所述观察模块(500)与远程显示端通讯连接,所述观察模块(500)能摄录所述壳体(100)于朝向所述挂钩(310)一侧的画面,并将摄录到的所述画面发送至所述远程显示端。2.根据权利要求1所述的高空巡线机器人,其特征在于,所述移动模块(200)包括:转轮(210),可转动地设置于所述壳体(100)上,所述转轮(210)的数量设置为至少两个,至少两个所述转轮(210)沿第一方向间隔排列;夹紧装置,设置于所述壳体(100)上,所述夹紧装置能够与所述转轮(210)共同夹紧所述线缆以将所述壳体(100)支撑于所述线缆上,所述移动控制模块(400)与其中一个所述转轮(210)传动连接并能够控制该所述转轮(210)转动。3.根据权利要求2所述的高空巡线机器人,其特征在于,所述夹紧装置包括夹紧板(221)、抬升杆(222)、锁扣轮(223)和弹性件,所述夹紧板(221)固定设置于所述壳体(100)上,所述抬升杆(222)的第一端可转动地设置于所述夹紧板(221)上,所述抬升杆(222)的第二端连接所述锁扣轮(223),所述弹性件配置为提供迫使所述抬升杆(222)朝靠近所述转轮(210)的方向转动的力,以使所述锁扣轮(223)与所述转轮(210)共同夹紧所述线缆。4.根据权利要求2所述的高空巡线机器人,其特征在于,所述移动控制模块(400)包括传动组件和驱动设备(420);其中,所述传动组件包括第一齿轮(411)、第二齿轮(412)、第三齿轮(413)、第四齿轮(414)和传动杆(415),所述第一齿轮(411)与所述驱动设备(420)连接,所述第二齿轮(412)和所述第三齿轮(413)分别固定设置于所述传动杆(415)相对的两端,所述第四齿轮(414)与其中一个所述转轮(210)共轴固定设置,所述传动杆(415)可转动地设置于所述壳体(100)上,所述第一齿轮(411)和所述第二齿轮(412)啮合连接,所述第三齿轮(413)与所述第四齿轮(414)啮合连接,所述控制器与所述驱动设备(420)通讯连接,所述控制器能够控制所述驱动设备(420),以使所述驱动设备(420)驱动所述第一齿轮(411)转动。5.根据权利要求4所述的高空巡线机器人,其特征在于,所述驱动设备(420)设置为电机,所述第一齿轮(411)固定套设于所述电机的输出轴上。6.根据权利要求1所述的高空巡线机器人,其特征在于,还包括障碍物监测模块(600)和报警模块(700),所述障碍物监测模块(600)和所述报警模块(700)均与所述控制器通讯连接,所述障碍物监测模块(600)能够在监测到所述壳体(100)沿移动方向上存在未及时清除的所述异物时向所述控制器发送报警信号,所述控制器接收到所述报警信号后控制所述报警模块(700)报警。7.根据权利要求6所述的高空巡线机器人,其特征在于,所述障碍物监测模块(600)包
括:异物挡板(610),成对设置于所述壳体(100)沿移动方向上相对的两侧,所述异物挡板(610)可伸缩设置于所述壳体(100);压力传感器,设置于所述壳体(100)上并与所述异物挡板(610)一一对应设置,所述压力传感器与所述控制器通讯连接,所述压力传感器连接对应的所述异物挡板(610)并能够实时监测对应的所述异物挡板(610)在所述壳体(100)移动过程中受到对应侧未及时清除的所述异物的推力。8.根据权利要求6所述的高空巡线机器人,其特征在于,所述报警模块(700)设置为蜂鸣器和/或警示灯。9.根据权利要求1所述的高空巡线机器人,其特征在于,所述观察模块(500)包括摄像头(510),所述摄像头(510)沿朝向所述挂钩(310)的一侧固定设置于所述壳体(100),所述摄像头(510)与所述远程显示端通讯连接。10.根据权利要求1所述的高空巡线机器人,其特征在于,所述观察模块(500)还包括探照灯(520),所述探照灯(520)沿朝向所述挂钩(310)的一侧固定设置于所述壳体(100)。
技术总结
本发明属于高空巡线设备技术领域,公开了一种高空巡线机器人,其包括壳体和设置于壳体上的移动模块、异物清除模块、移动控制模块、观察模块和控制器,移动模块能使壳体支撑于线缆上并驱使壳体沿线缆的长度方向移动,异物清除模块包括设置于壳体上的挂钩,挂钩用于钩取并清除线缆上的异物,移动控制模块与控制器通讯连接,控制器能够控制移动控制模块,以使移动控制模块控制移动模块以驱使壳体沿线缆的长度方向移动,观察模块能摄录壳体于朝向挂钩一侧的画面,并将摄录到的画面发送至远程显示端。本发明提供的高空巡线机器人,能在巡线过程中有效清除线缆上的异物,保证巡线工作的可靠性和有效性。靠性和有效性。靠性和有效性。
技术研发人员:梁嘉年 杨燕槟 方津 朱婷婷 陈伙荣 梁达安 徐启锋
受保护的技术使用者:广东电网有限责任公司清远供电局
技术研发日:2022.09.20
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。