1.本发明涉及高空巡线设备技术领域,尤其涉及一种高空巡线机器人。
背景技术:
2.架空输电线路一般长达几公里到几百公里,线路设备长期露置在大自然的环境中运行,遭受各种气候条件的侵袭以及其它的外力破坏,所有这些因素都随时地危及线路的安全运行。而线路一旦发生故障,需要较长时间才能修复送电,会造成程度不同的损失。为了保证线路的安全运行,在线路运行过程中,需要加强线路的巡视和检查,随时发现设备的缺陷和危及线路安全运行的因素,以便及时检修消除隐患,并制定安全措施。
3.目前,对输电导线进行巡检的方法主要有人工巡检和直升机巡检两种方法。其中,人工巡检劳动强度大、工作环境恶劣、危险,而直升机巡检的成本又非常高。此外,目前一些厂家也研制出能够自行巡线的仿生机器人,但仍无法自行对位于线路上的异物进行识别和清理,其所有的清理工作仍需人工完成。
技术实现要素:
4.本发明的目的在于提供一种高空巡线机器人,能够在巡线过程中有效清除线路上的异物。
5.为达此目的,本发明采用以下技术方案:
6.一种高空巡线机器人,包括壳体和设置于所述壳体上的移动模块、异物清除模块、移动控制模块、观察模块和控制器;其中,
7.所述移动模块能使所述壳体支撑于线缆上并驱使所述壳体沿所述线缆的长度方向移动;
8.所述异物清除模块包括设置于所述壳体上的挂钩,所述挂钩用于钩取并清除所述线缆上的异物;
9.所述移动控制模块与所述控制器通讯连接,所述控制器能够控制所述移动控制模块,以使所述移动控制模块控制所述移动模块以驱使所述壳体沿所述线缆的长度方向移动;
10.所述控制器能够控制所述移动模块,以使所述移动模块驱动所述壳体沿所述线缆的长度方向移动;
11.所述观察模块与远程显示端通讯连接,所述观察模块能摄录所述壳体于朝向所述挂钩一侧的画面,并将摄录到的所述画面发送至所述远程显示端。
12.可选地,所述移动模块包括:
13.转轮,可转动地设置于所述壳体上,所述转轮的数量设置为至少两个,至少两个所述转轮沿第一方向间隔排列;
14.夹紧装置,设置于所述壳体上,所述夹紧装置能够与所述转轮共同夹紧所述线缆以将所述壳体支撑于所述线缆上,所述移动控制模块与其中一个所述转轮传动连接并能够
控制该所述转轮转动。
15.可选地,所述夹紧装置包括夹紧板、抬升杆、锁扣轮和弹性件,所述夹紧板固定设置于所述壳体上,所述抬升杆的第一端可转动地设置于所述夹紧板上,所述抬升杆的第二端连接所述锁扣轮,所述弹性件配置为提供迫使所述抬升杆朝靠近所述转轮的方向转动的力,以使所述锁扣轮与所述转轮共同夹紧所述线缆。
16.可选地,所述移动控制模块包括传动组件和驱动设备;其中,
17.所述传动组件包括第一齿轮、第二齿轮、第三齿轮、第四齿轮和传动杆,所述第一齿轮与所述驱动设备连接,所述第二齿轮和所述第三齿轮分别固定设置于所述传动杆相对的两端,所述第四齿轮与其中一个所述转轮共轴固定设置,所述传动杆可转动地设置于所述壳体上,所述第一齿轮和所述第二齿轮啮合连接,所述第三齿轮与所述第四齿轮啮合连接,所述控制器与所述驱动设备通讯连接,所述控制器能够控制所述驱动设备,以使所述驱动设备驱动所述第一齿轮转动。
18.可选地,所述驱动设备设置为电机,所述第一齿轮固定套设于所述电机的输出轴上。
19.可选地,还包括障碍物监测模块和报警模块,所述障碍物监测模块和所述报警模块均与所述控制器通讯连接,所述障碍物监测模块能够在监测到所述壳体沿移动方向上存在未及时清除的异物时向所述控制器发送报警信号,所述控制器接收到所述报警信号后控制所述报警模块报警。
20.可选地,所述障碍物监测模块包括:
21.异物挡板,成对设置于所述壳体沿移动方向上相对的两侧,所述异物挡板可伸缩设置于所述壳体;
22.压力传感器,设置于所述壳体上并与所述异物挡板一一对应设置,所述压力传感器与所述控制器通讯连接,所述压力传感器连接对应的所述异物挡板并能够实时监测对应的所述异物挡板在所述壳体移动过程中受到对应侧未及时清除的所述异物的推力。
23.可选地,所述报警模块设置为蜂鸣器和/或警示灯。
24.可选地,所述观察模块包括摄像头,所述摄像头沿朝向所述挂钩的一侧固定设置于所述壳体,所述摄像头与所述远程显示端通讯连接。
25.可选地,所述观察模块还包括探照灯,所述探照灯沿朝向所述挂钩的一侧固定设置于所述壳体。
26.有益效果:
27.本发明提供的高空巡线机器人,移动模块能够使壳体支撑于线缆上,相关操作人员操控控制器能够控制移动控制模块,使移动控制模块控制移动模块,进而使移动模块驱使壳体沿线缆的长度方向移动,移动过程中观察模块能够对壳体朝向挂钩的一侧画面进行摄录并实时发送至远程显示端,使得相关操作人员能够通过远程显示端对线缆状况进行有效观察,并且异物清除模块中的挂钩能够在巡线过程中有效勾取并清除线缆上的异物,有效避免线缆上的异物影响高空巡线机器人的巡线工作,保证巡线工作的可靠性和有效性。
附图说明
28.图1是本发明实施例一提供的高空巡线机器人一视角的结构示意图;
29.图2是本发明实施例一提供的高空巡线机器人另一视角的结构示意图;
30.图3是本发明实施例一提供的高空巡线机器人又一视角的结构示意图;
31.图4是本发明实施例一提供的高空巡线机器人内部一部分结构示意图;
32.图5是本发明实施例一提供的高空巡线机器人内部另一部分结构示意图;
33.图6是本发明实施例一提供的高空巡线机器人内部又一部分结构示意图;
34.图7是本发明实施例二提供的高空巡线机器人内部的部分结构示意图。
35.图中:
36.100、壳体;110、天线;
37.200、移动模块;210、转轮;221、夹紧板;222、抬升杆;223、锁扣轮;224、抬升缸;
38.300、异物清除模块;310、挂钩;
39.400、移动控制模块;411、第一齿轮;412、第二齿轮;413、第三齿轮;414、第四齿轮;415、传动杆;420、驱动设备;
40.500、观察模块;510、摄像头;520、探照灯;
41.600、障碍物监测模块;610、异物挡板;611、通过槽;620、伸缩轴;
42.700、报警模块。
具体实施方式
43.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
44.在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
45.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
46.在本实施例的描述中,术语“上”、“下”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
47.实施例一
48.本实施例提供一种高空巡线机器人,参照图1至图6所示,高空巡线机器热包括壳体100和设置于壳体100上的移动模块200、异物清除模块300、移动控制模块400、观察模块500和控制器(未示出),其中移动模块200能使壳体100支撑于线缆上并驱使壳体100沿线缆
的长度方向移动,异物清除模块300包括设置于壳体100上的挂钩310,挂钩310用于钩取并清除线缆上的异物,移动控制模块400与控制器通讯连接,控制器能够控制移动控制模块400,以使移动控制模块400控制移动模块200以驱使壳体100沿线缆的长度方向移动,观察模块500与远程显示端通讯连接,观察模块500能摄录壳体100于朝向挂钩310一侧的画面,并将摄录到的画面发送至远程显示端。
49.于本实施例中,移动模块200能够使壳体100支撑于线缆上,相关操作人员操控控制器能够控制移动控制模块400,使移动控制模块400控制移动模块,进而使移动模块200驱使壳体100沿线缆的长度方向移动,移动过程中观察模块500能够对壳体100朝向挂钩310的一侧画面进行摄录并实时发送至远程显示端,使得相关操作人员能够通过远程显示端对线缆状况进行有效观察,并且异物清除模块300中的挂钩310能够在巡线过程中有效勾取并清除线缆上的塑料袋等异物,有效避免线缆上的异物影响高空巡线机器人的巡线工作,保证巡线工作的可靠性和有效性。
50.于本实施例中,壳体100的长度方向即为其在线缆上的移动方向。
51.具体地,在相关操作人员操控控制器,以使移动模块200驱使壳体100沿线缆的长度方向移动,当相关操作人员通过远程显示端观测到异物时,此使控制壳体100的移动速度降低,随后移动模块200控制壳体100缓慢前进,过程中相关操作人员通过观察模块500反馈至远程显示端的画面观察壳体100上的挂钩310是否勾取住异物,当确定挂钩310成功勾取住异物后,控制移动模块200以使壳体100相对前进方向后退一段距离,如此会使得挂钩310带动异物在线缆上移动,在后退一段距离后,移动模块200再次控制壳体100前进,如此进行多次反复的前进与后退后,异物便会在自身重力的作用下掉落,从而实现对线缆上异物的清除功能。
52.可选地,控制器优选设置为印制电路板。
53.可选地,异物清除模块300中挂钩310的数量设置为至少一个,本实施例中挂钩310的数量设置为两个,并沿壳体100的宽度方向间隔设置,挂钩310呈j字形设置。
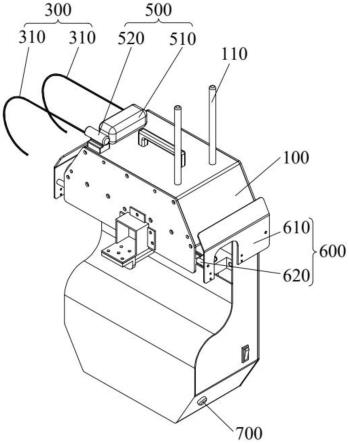
54.继续参照图1至图2所示,观察模块500包括摄像头510,摄像头510沿朝向挂钩310的一侧固定设置于壳体100,摄像头510与远程显示端通讯连接。远程显示端不限于手机、电脑等显示端,且摄像头510向远程显示端发送摄录画面的原理及过程为现有技术。
55.进一步地,观察模块500还包括探照灯520,探照灯520沿朝向挂钩310的一侧固定设置于壳体100。当处于夜晚等光线较暗的环境中时,可以在进行巡线过程中开启探照灯520,如此相关操作人员便可轻松有效的通过摄像头510将线缆上的具体情况观测到。
56.可选地,壳体100的上侧还设置有把手,便于相关操作人员更加便捷省力地抓取搬运高空巡线机器人。
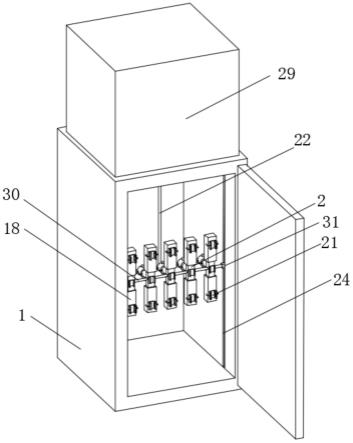
57.具体地,参照图3至图5所示,移动模块200包括转轮210和夹紧装置,其中转轮210可转动地设置于壳体100上,转轮210的数量设置为至少两个,至少两个转轮210沿第一方向间隔排列,夹紧装置设置于壳体100上,夹紧装置能够与转轮210共同夹紧线缆以将壳体100支撑于线缆上,移动控制模块400与其中一个转轮210传动连接并能够控制该转轮210转动。于本实施例中,转轮210的数量设置为两个,第一方向优选设置为壳体100的长度方向。
58.进一步地,夹紧装置包括夹紧板221、抬升杆222、锁扣轮223和弹性件,夹紧板221固定设置于壳体100上,抬升杆222的第一端可转动地设置于夹紧板221上,抬升杆222的第
二端连接锁扣轮223,弹性件配置为提供迫使抬升杆222朝靠近转轮210的方向转动的力,以使锁扣轮223与转轮210共同夹紧线缆。
59.具体地,参照图4所示,壳体100的外形设置为“匚”字形,当壳体100支撑于线缆上时,转轮210支撑于线缆的上方,锁扣轮223对应设置于线缆的下方,抬升杆222通过夹紧板221连接在壳体100上,当需要将壳体100安装至线缆上时,相关操作人员向下拉动锁扣轮223,使锁扣轮223带动抬升杆222朝远离转轮210的方向转动,使得转轮210与锁扣轮223之间打开并能够放入线缆。过程中弹性件产生弹性形变并逐渐产生驱动抬升杆222朝靠近转轮210方向转动的弹性复位力。在将转轮210支撑在线缆上后相关操作人员松开对锁扣轮223的拉动,即撤掉施加在锁扣轮223上的拉力,使得抬升杆222在弹性件的弹性复位力的作用下朝靠近转轮210的方向转动,进而使得转轮210和锁扣轮223能够于线缆的上下两侧共同夹紧线缆,从而使壳体100可靠稳定的支撑在线缆上。
60.进一步地,继续参照图3至图5所示,移动控制模块400包括传动组件和驱动设备420,其中传动组件包括第一齿轮411、第二齿轮412、第三齿轮413、第四齿轮414和传动杆415,第一齿轮411与驱动设备420连接,第二齿轮412和第三齿轮413分别固定设置于传动杆415相对的两端,第四齿轮414与其中一个转轮210共轴固定设置,传动杆415可转动地设置于壳体100上,第一齿轮411和第二齿轮412啮合连接,第三齿轮413与第四齿轮414啮合连接,控制器与驱动设备420通讯连接,控制器能够控制驱动设备420,以使驱动设备420驱动第一齿轮411转动。
61.于本实施例中,第一齿轮411、第二齿轮412、第三齿轮413和第四齿轮414均设置为斜齿轮。具体地,驱动设备420驱动第一齿轮411转动,能够带动与第一齿轮411啮合链接的第二齿轮412转动,第二齿轮412转动能够通过传动杆415带动第三齿轮413转动,第三齿轮413转动能够带动与之啮合链接的第四齿轮414转动,从而带动与第四齿轮414共轴固定设置的转轮210转动,进而能够驱动壳体100在线缆上移动。
62.于本实施例中,驱动设备420设置为电机,电机的固定端固定设置于壳体100上,第一齿轮411固定套设于电机的输出轴上。
63.继续参照图1至图3所示,高空巡线机器人还包括障碍物监测模块600和报警模块700,障碍物监测模块600和报警模块700均与控制器通讯连接,障碍物监测模块600能够在监测到壳体100沿移动方向上存在未及时清除的异物时向控制器发送报警信号,控制器接收到报警信号后控制报警模块700报警。
64.于本实施例中,障碍物监测模块600包括异物挡板610和压力传感器(未示出),异物挡板610成对设置于壳体100沿移动方向上相对的两侧,异物挡板610可伸缩设置于壳体100上,压力传感器设置于壳体100上并与异物挡板610一一对应设置,压力传感器与控制器通讯连接,压力传感器连接对应的异物挡板610并能够实时监测对应的异物挡板610在壳体100移动过程中受到对应侧未及时清除的异物的推力。
65.具体地,异物挡板610上连接有伸缩轴620,伸缩轴620能够沿壳体100的移动方向伸缩于壳体100,异物挡板610能够阻挡线缆上的异物,以避免未及时清理的异物在壳体100移动的过程中进入至壳体100内,卡住移动模块200或移动控制模块400中的内部构件。当相关操作人员由于工作疏忽忽略了线缆上的异物时,随着壳体100的移动,线缆上未及时清除的异物会堆积在异物挡板610远离壳体100的一侧,若只有少量的异物堆积在异物挡板610
上时,此时异物对于壳体100的移动影响不会太大,随着高空巡线机器人在同一线缆上的运行时长的增加,就会导致异物挡板610一侧的异物越堆越多,从而阻碍壳体100的移动,此时堆积的异物会对异物挡板610产生一个推力,进而会使得压力传感器通过伸缩轴620将推力监测到,当推力大于预设值时,则压力传感器会将报警信号发送给控制器,控制器在接收到报警信号后会将报警模块700激活。而在相关操作人员将异物清理后,由于压力传感器监测不到数值,此时报警模块700也会自动解除报警。
66.压力传感器的压力监测原理、压力传感器与控制器之间的通讯过程以及控制器与报警模块700之间的通讯过程均为现有技术。
67.优选地,异物挡板610上还开设有通过槽611,通过槽611的设置能够给线缆提供可靠的穿设空间。
68.进一步地,报警模块700设置为蜂鸣器和/或警示灯。当异物挡板610前的异物堆积过多时,压力传感器会将报警信号发送给控制器,随后控制器在接收到报警信号后将蜂鸣器激活,使蜂鸣器发出声响,或者将警示灯激活,使警示灯亮灯或者闪烁,提醒现场的操作人员能够及时观测到,便于现场操作人员寻找。
69.于本实施例中,壳体100上还设置有天线,天线的设置能够更加稳定有效地传递控制器的各种通讯信号,避免高空信号传递不佳导致控制器的通讯控制过程失效。
70.实施例二
71.本实施例与实施例一提供的高空巡线机器人的不同之处在于:夹紧装置包括夹紧板221、抬升杆222、锁扣轮223和抬升缸224,夹紧板221固定设置于壳体100上,抬升杆222的第一端可转动地设置于夹紧板221上,抬升杆222的第二端连接锁扣轮223,抬升缸224的固定端固定设置于壳体100上,抬升缸224的伸缩端与抬升杆222相铰接。
72.具体地,当需要将壳体100安装至线缆上时,相关操作人员控制抬升缸224的伸缩端相对固定端回缩,使抬升杆222带动锁扣轮223朝远离转轮210的方向转动,从而使得转轮210与锁扣轮223之间打开并能够放入线缆。在将转轮210支撑在线缆上后,相关操作人员控制抬升缸224的伸缩端相对固定端伸出,使抬升杆222带动锁扣轮223朝靠近转轮210的方向转动,进而使得转轮210和锁扣轮223能够于线缆的上下两侧共同夹紧线缆,从而使壳体100可靠稳定的支撑在线缆上。
73.于本实施例中,抬升缸224与控制器通讯连接,控制器能够控制抬升缸224的伸缩端相对固定端伸缩。
74.显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。