新型水下爬壁清洁机器人
- 国知局
- 2024-07-12 12:49:48
本技术涉及自动清理水下光滑壁面,尤其涉及新型水下爬壁清洁机器人。
背景技术:
1、到2022年底,全国各类水生野生动物驯养繁育、展演展示的场馆超过300家,年接受水族馆各类野生动物科普教育的公众近2亿人次,2021年,全国游泳场地3.25万个,场地面积0.74亿平方米,根据中国渔业统计年鉴统计,2022年水产品产量达到8750万吨,我国水中行业规模庞大,前景大好。
2、基于此,为了产业机械化和自动化的发展,我们对上述产业的运作过程进行分析,发现了无论是大型水族箱,亦或是游泳池,以及养殖鱼池缸壁的清洁一直是困扰使用者的一大问题:
3、对于鱼缸而言,鱼缸壁上的污染物主要有藻类和灰尘,它们粘在鱼缸壁上,经过长时间的积累,就形成了一层污垢,清理它们的方法主要有:1、生物清洁,主要是在鱼缸内饲养少量清道夫或黑壳虾,它们会啃食藻类。但是这种方法的缺点也很明显,就是这些生物不能完全清除藻类。2、刮藻刀,主要利用一种工具将缸壁上的污垢刮下,但这种方式的缺陷也很明显,就是清洁过程过于麻烦,若是将水全部移出鱼缸再进行清洁,成本过高;若是不将水移出则清洁难度过高,并且对于边角接缝处难以完全清洁,对于大型水族箱而言,清理缸壁基本只剩下了一种方法:潜水员携带装备潜水清理,这种方法费时费力,并且在当下人力资源较为短缺的情况下花费较大。
4、对于游泳池的清洁而言,基本所有的游泳池都无法实现每日换水,这种做法的成本太高,因此,游泳池的清洁办法较为复杂:外壳(1)毛发聚集器过滤除去水中的毛发、纤维状物及较大的悬浮物。刮板(2)加入明矾或其他絮凝剂以沉淀水中的污垢,使水与杂质快速、比较彻底的分离开来电机板(3)采用水泵加压,使原水通过过滤介质,去除水中的悬浮物,从而达到过滤的目的出水口(4)活性炭过滤器过滤,即利用活性炭的吸附性能去除液体中的杂质,使水体得到净化,可以吸附水中的有机物、胶体、微生物、各类离子等。防水无刷电机(5)紫外线杀菌系统,即用紫外照射,配合降低了氯剂量,减少池水中的三氯甲烷含量。但泳池长期使用,灰尘、角质及污物难免会沉积到池底或壁面上,若要清理该脏污,则必须排出大量池水进行清扫,成本过高。
5、对于养殖鱼池而言,虽然工厂化水产养殖是一种工业化程度较高的养殖模式,自动投饲机、苗种分级等设备已得到较为普遍运用,但是养殖过程中依然有部分环节需要依靠人工完成,如鱼池清刷、起捕等,因此造成的人员成本高、劳动强度大等问题是制约工厂化养殖模式普及应用的重要因素之一。随着社会的进步与产业的发展,我国的工厂化水产养殖必将走向智能化,采用机器人技术清刷是未来工厂化养殖鱼池清刷的主要发展方向。
6、基于目前的这些困难,需要一款能够自动清理水下光滑壁面的机器人,具体为能够在水下环境下完成对壁面的清理,大量节省人力物力,可以按照既定的清刷路径清刷壁面,目前由于人员成本不断提高,越来越多的地方运用机器代替人类劳动,机器人也走进我们普通家庭,水下壁面清刷机器人的研发可以大大降低工作强度,节约劳动成本,提高机械化和自动化水平;同时节约水资源,减轻水质污染和降低疾病发生率。
7、为此,我们提出新型水下爬壁清洁机器人解决上述问题。
技术实现思路
1、本实用新型提供新型水下爬壁清洁机器人,解决了现有水下光滑壁面难以自动清理的技术问题。
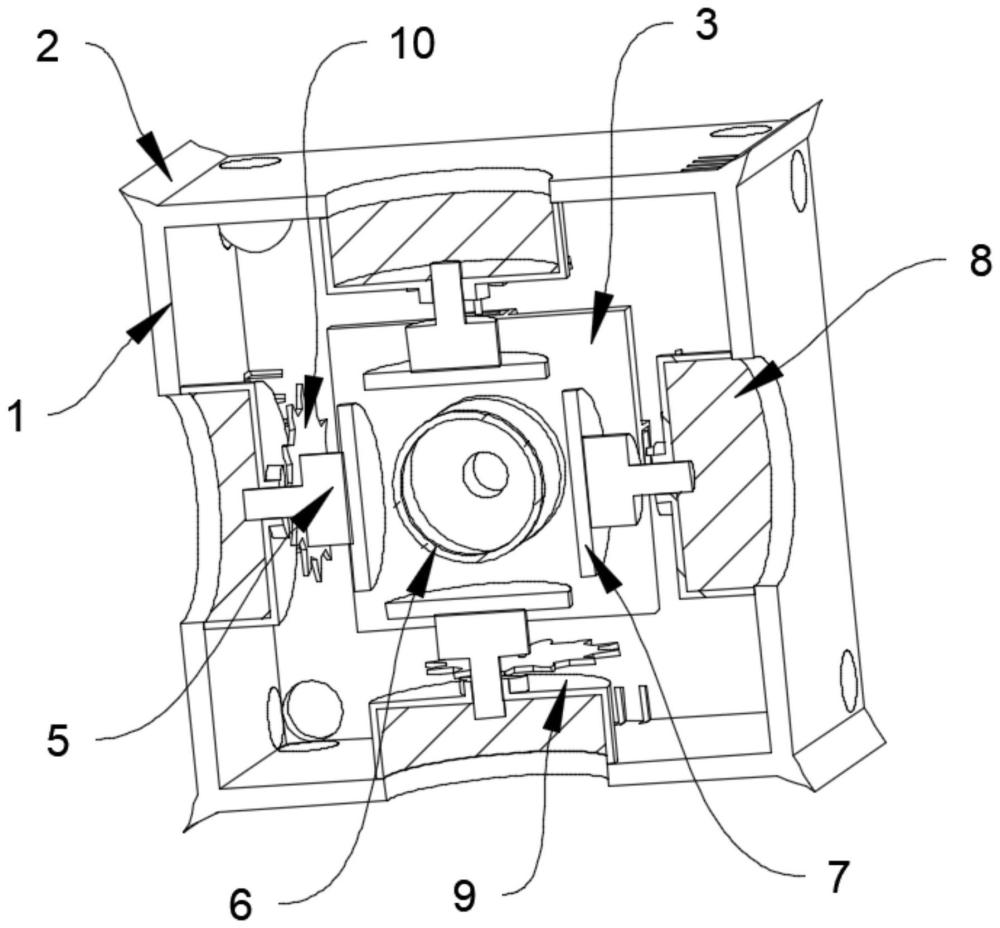
2、为解决上述技术问题,本实用新型提供的新型水下爬壁清洁机器人,包括外壳,所述外壳的四角处一体成型有刮板,外壳的外壁开设有多组出水口,外壳的内部设置有电机板,电机板的一侧安装有四个转向防水直流电机,所述转向防水直流电机的驱动端安装有转向齿轮,外壳的内壁侧安装有电件防水亚克力管和多个固定座,所述固定座的一侧安装有防水无刷电机,所述防水无刷电机的驱动端安装有离心轮,外壳的内壁安装有多个分水盘,所述离心轮位于分水盘的内部,所述分水盘的一侧安装有与转向齿轮啮合连接的直齿轮。
3、优选的,所述外壳的外壁开设有多个通孔,通孔的内壁转动连接有球形轮。
4、优选的,所述分水盘的内壁开设有方形孔。
5、优选的,所述外壳的材质为高密树脂,所述刮板的材质为高弹橡胶。
6、优选的,所述外壳上设置有定位模块,定位模块包括硬件和软件两个部分,硬件部分采用realsense双目摄像头+imu和nuc机载电脑的组合。
7、优选的,所述外壳内设置有锂离子聚合物电池。
8、与相关技术相比较,本实用新型提供的新型水下爬壁清洁机器人具有如下有益效果:
9、1、本实用新型中,在离心轮高速转动将水带动排出时,将排出的水集中的从方形孔中压出,并从外壳排水口处快速排出,利用反推作用,致使机器人的移动较为简单合理的实现,省去了四面布置轮系的复杂结构,并且,为转角的实现更近一步,至此,只需完成分水盘的调控即可完成移动与转角过程,故加设较为高效的转向齿轮和直齿轮,完成对分水盘的控制,实现了对现实壁面结构的针对处理,此外,利用球形轮结构,增大机器自由度,使其更便于旋转,促进了内壁转角的实现。
10、2、本实用新型中,为高弹橡胶的刮板,压贴墙壁更紧,其边界处较为尖锐,能有效的铲除脏污,采用高密树脂的外壳,相较于传统的塑料或者合金外壳,该材料具有疏水性更强、密封性更好、质量更轻便、形状更多变等优点。
技术特征:1.新型水下爬壁清洁机器人,包括外壳(1),其特征在于,所述外壳(1)的四角处一体成型有刮板(2),外壳(1)的外壁开设有多组出水口(4),外壳(1)的内部设置有电机板(3),电机板(3)的一侧安装有四个转向防水直流电机(11),所述转向防水直流电机(11)的驱动端安装有转向齿轮(10),外壳(1)的内壁侧安装有电件防水亚克力管(6)和多个固定座(7),所述固定座(7)的一侧安装有防水无刷电机(5),所述防水无刷电机(5)的驱动端安装有离心轮(8),外壳(1)的内壁安装有多个分水盘(9),所述离心轮(8)位于分水盘(9)的内部,所述分水盘(9)的一侧安装有与转向齿轮(10)啮合连接的直齿轮(12)。
2.根据权利要求1所述的新型水下爬壁清洁机器人,其特征在于,所述外壳(1)的外壁开设有多个通孔,通孔的内壁转动连接有球形轮。
3.根据权利要求2所述的新型水下爬壁清洁机器人,其特征在于,所述分水盘(9)的内壁开设有方形孔(13)。
4.根据权利要求3所述的新型水下爬壁清洁机器人,其特征在于,所述外壳(1)的材质为高密树脂,所述刮板(2)的材质为高弹橡胶。
5.根据权利要求4所述的新型水下爬壁清洁机器人,其特征在于,所述外壳(1)上设置有定位模块。
6.根据权利要求5所述的新型水下爬壁清洁机器人,其特征在于,所述外壳(1)内设置有锂离子聚合物电池。
技术总结本技术公开了新型水下爬壁清洁机器人,涉及自动清理水下光滑壁面技术领域,包括外壳,所述外壳的四角处一体成型有刮板,外壳的外壁开设有多组出水口,外壳的内部设置有电机板,电机板的一侧安装有四个转向防水直流电机,本技术中,在离心轮高速转动将水带动排出时,将排出的水集中的从方形孔中压出,并从外壳排水口处快速排出,利用反推作用,致使机器人的移动较为简单合理的实现,省去了四面布置轮系的复杂结构,并且,为转角的实现更近一步,至此,只需完成分水盘的调控即可完成移动与转角过程,故加设较为高效的转向齿轮和直齿轮,完成对分水盘的控制,实现了对现实壁面结构的针对处理。技术研发人员:李奂辰,高渝林,张家硕,张锦政,张书鹏受保护的技术使用者:郑州大学技术研发日:20231019技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240614/101129.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表