一种智能农作物种植机器人
- 国知局
- 2024-07-12 12:55:48
本申请属于机器人,特别是涉及一种智能农作物种植机器人。
背景技术:
1、农业机器人是一种机器,是机器人在农业生产中的运用,是一种可由不同程序软件控制,以适应各种作业,能感觉并适应作物种类或环境变化,有检测(如视觉等)和演算等人工智能的新一代无人自动操作机械。随着农业科技的不断进步,人们对机械化和智能化种植的设备开发也在不断地进步,农业机器人出现后,发展很快,许多国家在农业机器人的研制和发展,出现了多种类型农业机器人。目前日本居于世界各国之首。在进入21世纪以后,新型多功能农业机器人得到日益广泛地应用,智能化机器人也会在广阔的田野上越来越多地代替手工完成各种农活,第二次农业革命将深入发展。区别于工业机器人,是一种新型多功能农业机械。农业机器人的广泛应用,改变了传统的农业劳动方式,提高了农民的劳动力,促进了现代农业的发展。
2、但是目前用于绝大多数常见种子播种种植的普适设备由于智能化技术的相对不完善,且种植的不稳定性也会造成作物成活率无法保障。
技术实现思路
1、1.要解决的技术问题
2、基于目前用于绝大多数常见种子播种种植的普适设备由于智能化技术的相对不完善,且种植的不稳定性也会造成作物成活率无法保障的问题,本申请提供了一种智能农作物种植机器人。
3、2.技术方案
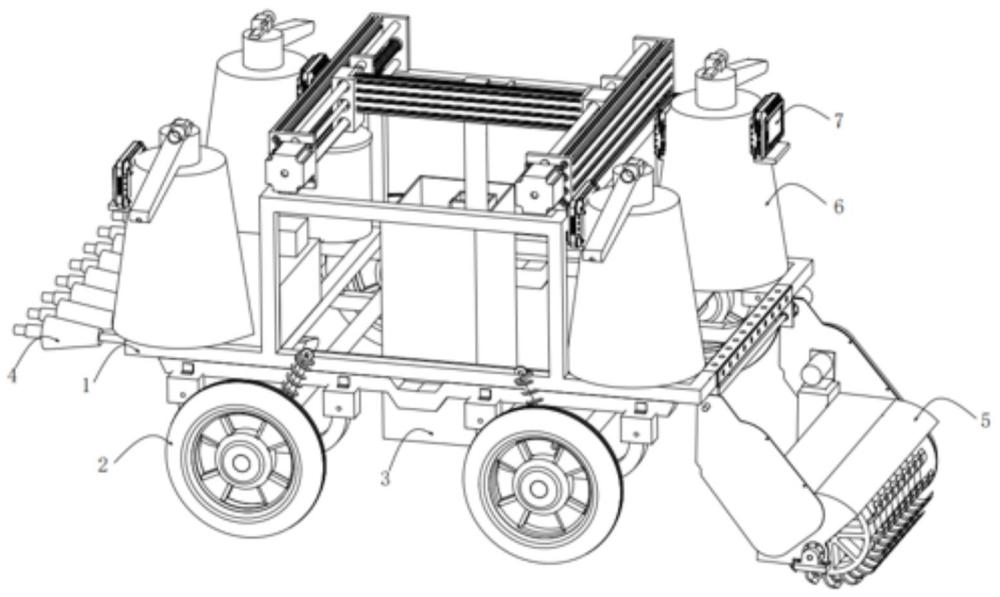
4、为了达到上述的目的,本申请提供了一种智能农作物种植机器人,包括依次连接的感知层、决策层和执行层,所述执行层包括依次连接的旋耕机构、车架和灌溉机构,所述车架上设置有前桥后桥和路侧设备,所述车架与轮胎连接,所述决策层包括主控终端,所述主控终端设置于所述路侧设备上,所述感知层设置于所述车架上,所述感知层用于感知周围的环境状况,将获取的环境数据传递给主控终端,所述主控终端对数据进行综合分析和处理,结合农业作业的实际需求,进行路径规划和任务分配,并生成相应的决策策略,生成相应的行车指令,所述车架上设置有三维滑台种植机构。
5、本申请提供的另一种实施方式为:所述感知层包括深度相机、激光雷达、卫星定位系统、土壤水肥传感器和温湿度传感器。
6、本申请提供的另一种实施方式为:所述决策层包括相互连接的智能控制器和底盘控制器。
7、本申请提供的另一种实施方式为:所述路侧设备可拆卸,所述路侧设备与所述主控终端连接,所述路侧设备包括监测组件、喷水组件、爆闪紫外线灯、超声波驱虫器、种子仓和肥料仓,所述喷水组件包括相互连接的喷嘴和水箱,所述喷嘴能够旋转。
8、本申请提供的另一种实施方式为:所述路侧设备为4个。
9、本申请提供的另一种实施方式为:所述智能控制器采用了nvidia jetson nano搭载ros2系统。
10、本申请提供的另一种实施方式为:所述底盘控制器采用了aurix2g-tc375芯片。
11、本申请提供的另一种实施方式为:所述前桥后桥、驱动电机、电控系统、配电模块、截波器和显示器依次连接,所述电控系统与电池箱、所述旋耕机构、水泵、转向电机、制动器和所述三维滑台分别连接,所述配电模块与电池箱、所述旋耕机构、水泵、转向电机、制动器和所述三维滑台分别连接。
12、本申请提供的另一种实施方式为:所述三维滑台为十字滑台。
13、本申请提供的另一种实施方式为:所述智能农作物种植机器人采用集中式电气架构,整体采用48v电压平台,由一块电池箱统一供电。
14、3.有益效果
15、与现有技术相比,本申请提供的智能农作物种植机器人的有益效果在于:
16、本申请提供的智能农作物种植机器人,为适用于精细化农业种植区域的配有路侧设备的集成一体化种植设备,包括主体车架、种植浇灌机构、物料可移动补充机构和控制接收器,机械装置能够一次性完成常见种植的所有步骤,物料可移动补充机构可在预设点位进行对种子、肥料和水的补充,智能交互系统的装载使得机器人之间可协同高效作业,通过该种方式能够使得种植更加地快捷,相对于现有人工种植更加的省时省力,减少了人工和能源的成本,而通过机械化、电动化和智能化的种植方式也保障了种植的稳定性。
17、本申请提供的智能农作物种植机器人,为可用于针对耕种、种植、施肥、灌溉等农业生产环节的各类机器。
18、本申请提供的智能农作物种植机器人,用于解决当前农业仍大量依赖人力不智能;多功能分散没有集成化设备的问题。智能交互系统的装载使得机器人之间可协同高效作业,通过该种方式能够使得种植更加地快捷,相对于现有人工种植更加的省时省力,减少了人工和能源的成本,而通过机械化、电动化和智能化的种植方式也保障了种植的稳定性。
技术特征:1.一种智能农作物种植机器人,其特征在于:包括依次连接的感知层、决策层和执行层,所述执行层包括依次连接的旋耕机构、车架和灌溉机构,所述车架上设置有前桥后桥和路侧设备,所述车架与轮胎连接,所述决策层包括主控终端,所述主控终端设置于所述路侧设备上,所述感知层设置于所述车架上,所述感知层用于感知周围的环境状况,将获取的环境数据传递给主控终端,所述主控终端对数据进行综合分析和处理,结合农业作业的实际需求,进行路径规划和任务分配,并生成相应的决策策略,生成相应的行车指令,所述车架上设置有三维滑台种植机构。
2.如权利要求1所述的智能农作物种植机器人,其特征在于:所述感知层包括深度相机、激光雷达、卫星定位系统、土壤水肥传感器和温湿度传感器。
3.如权利要求2所述的智能农作物种植机器人,其特征在于:所述决策层包括相互连接的智能控制器和底盘控制器。
4.如权利要求3所述的智能农作物种植机器人,其特征在于:所述路侧设备可拆卸,所述路侧设备与所述主控终端连接,所述路侧设备包括监测组件、喷水组件、爆闪紫外线灯、超声波驱虫器、种子仓和肥料仓,所述喷水组件包括相互连接的喷嘴和水箱,所述喷嘴能够旋转。
5.如权利要求4所述的智能农作物种植机器人,其特征在于:所述路侧设备为4个。
6.如权利要求5所述的智能农作物种植机器人,其特征在于:所述智能控制器采用了nvidia jetson nano搭载ros2系统。
7.如权利要求6所述的智能农作物种植机器人,其特征在于:所述底盘控制器采用了aurix2g-tc375芯片。
8.如权利要求6所述的智能农作物种植机器人,其特征在于:所述前桥后桥、驱动电机、电控系统、配电模块、截波器和显示器依次连接,所述电控系统与电池箱、所述旋耕机构、水泵、转向电机、制动器和所述三维滑台分别连接,所述配电模块与电池箱、所述旋耕机构、水泵、转向电机、制动器和所述三维滑台分别连接。
9.如权利要求6所述的智能农作物种植机器人,其特征在于:所述三维滑台为十字滑台。
10.如权利要求1~9中任一项所述的智能农作物种植机器人,其特征在于:所述智能农作物种植机器人采用集中式电气架构,整体采用48v电压平台,由一块电池箱统一供电。
技术总结本申请提供了一种智能农作物种植机器人,包括依次连接的感知层、决策层和执行层,所述执行层包括依次连接的旋耕机构、三维滑台种植机构、车架和灌溉机构,所述车架上设置有前桥后桥和路侧设备,所述车架与轮胎连接,所述决策层包括主控终端,所述主控终端设置于所述路侧设备上,所述感知层设置于所述车架上,所述感知层用于感知周围的环境状况,将获取的环境数据传递给主控终端,所述主控终端对数据进行综合分析和处理,结合农业作业的实际需求,进行路径规划和任务分配,并生成相应的决策策略,生成相应的行车指令,所述车架上设置有三维滑台。可用于针对耕种、种植、施肥、灌溉等农业生产环节的各类机器。技术研发人员:张昊博,邵昱龙,张涵,王俊杰,黄岩军,王晓涵,杜昕俐受保护的技术使用者:同济大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240614/101760.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表