果园施肥机器人和施肥控制方法
- 国知局
- 2024-07-12 13:00:47
本发明涉及农业种植设备,尤其涉及一种果园施肥机器人和施肥控制方法。
背景技术:
1、在果树生长的过程中,需要定期对果树进行施肥,以确保果树能够正常生长,从而保证水果品质和产量。
2、现有的果园施肥方式主要以机械或人工开沟施肥为主,其中,机械开沟施肥虽然能提高施肥作业效率,但机械控制中大多采用连续定点定量施肥,导致肥料利用率低,人工开沟施肥虽然能根据果树位置进行定点开沟施肥来保证肥料利用率,但劳动强度大,且需要施肥人员具有足够的施肥经验。
3、而且,不同生长时期和品质果树,根系分布不同,而农艺角度要求肥料投放到果树根系周围,缩短肥料养分向根系迁移的距离,以促进根系对养分的高效吸收。同时,在施肥过程中,需要将肥料投放至土壤中的预定深度,让肥料能够与土壤充分混合,以充分改善根系空间的土壤理化特性和生物特性,为果树根系创造健康的生长环境,最大限度提高肥料利用率。
4、基于此,有必要提供一种新的果园施肥机器人,以在施肥的过程中能够根据果树的生长状态对果树进行施肥量精准调控,同时保证肥料利用率。
技术实现思路
1、本发明提供一种果园施肥机器人和施肥控制方法,用以解决现有技术中对果树采取机械施肥时无法根据果树的生长状态对果树进行施肥量精准调控,同时无法保证肥料利用率的缺陷。
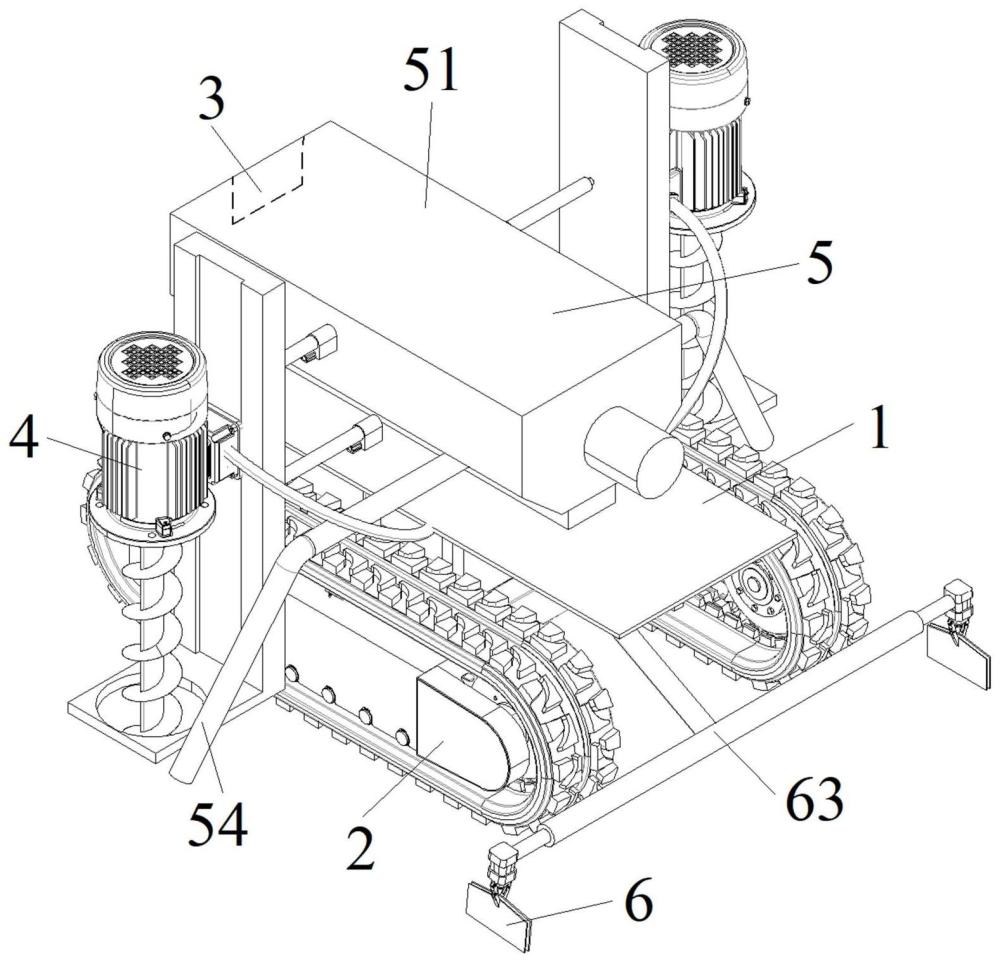
2、根据本发明的第一方面,提供一种果园施肥机器人,包括:本体、移动装置、摄像装置、打孔装置、排肥装置、覆土装置和控制装置,其中,
3、所述移动装置设置在所述本体的底部,所述移动装置用于带动所述本体移动;所述摄像装置设置在所述本体的头部,所述摄像装置用于拍摄所述本体两侧的果树,并获取果树的特征信息,所述特征信息包括果树的树干位置和冠层轮廓;所述打孔装置设置在所述本体的两侧,所述打孔装置用于向地面打下施肥孔;所述排肥装置设置在所述本体中,所述排肥装置用于将肥料投放至所述本体两侧的施肥孔中;所述覆土装置设置在所述本体的尾部,所述覆土装置用于对所述本体两侧的施肥孔进行覆土作业;
4、所述控制装置配置为:根据所述摄像装置获取的特征信息,确定每个果树的施肥位置,控制移动装置移动,让所述打孔装置到达施肥位置并打下施肥孔,控制排肥装置将肥料投放施肥孔中,最后控制覆土装置对施肥孔进行覆土作业。
5、根据本发明提供的一种果园施肥机器人,所述打孔装置包括:侧推机构、纵向移动机构、打孔电机和螺纹钻头,所述侧推机构连接至所述本体,所述纵向移动机构连接至所述侧推机构,所述打孔电机连接至所述纵向移动机构,所述螺纹钻头连接至所述打孔电机的输出端,
6、所述侧推机构能够驱动所述纵向移动机构沿所述本体的宽度方向移动,所述纵向移动机构能够驱动所述打孔电机沿竖直方向移动,所述打孔电机能够驱动所述螺纹钻头转动以对地面进行打孔。
7、根据本发明提供的一种果园施肥机器人,所述纵向移动机构包括纵向滑轨和纵向滑座,所述纵向滑轨连接至所述侧推机构,所述纵向滑座连接至所述纵向滑轨并能够沿竖直方向移动,所述打孔电机连接至所述纵向滑座。
8、根据本发明提供的一种果园施肥机器人,所述排肥装置包括:储料箱、输料管、轴流风机和排肥管,
9、所述储料箱固定设置在本体上,所述储料箱的底部设置有出料口,所述输料管能够接收来自于所述出料口的肥料,所述轴流风机和所述排肥管分别连接至所述输料管的两端,所述轴流风机能够将所述输料管中的肥料吹送至所述排肥管中,所述排肥管远离所述输料管的另一端延伸至所述本体侧部,并位于所述打孔装置的后方。
10、根据本发明提供的一种果园施肥机器人,所述排肥装置还包括:
11、排肥槽轮,所述排肥槽轮设置在所述出料口的下方并能够接收来自于所述出料口的肥料;
12、驱动电机,所述驱动电机传动连接至所述排肥槽轮并能够驱动所述排肥槽轮转动;
13、接料口,所述接料口设置在所述排肥槽轮的侧部,所述接料口连接至所述输料管,所述接料口能够接收来自于所述排肥槽轮的肥料并将肥料转移至所述输料管。
14、根据本发明提供的一种果园施肥机器人,所述排肥槽轮沿其长度方向设置有多个隔板,相邻的两个所述隔板之间形成有接料仓,每个所述接料仓中设置有多个沿径向方向向外延伸的分隔板,每个所述接料仓中的多个所述分隔板将当前的所述接料仓分隔成多个沿周向方向间隔设置的接料单元,所述接料口设置在靠近所述接料单元的位置。
15、根据本发明提供的一种果园施肥机器人,所述排肥槽轮的数量为两个,两个所述排肥槽轮分别连接所述驱动电机,每个所述排肥槽轮分别对应设置有所述接料口,每个所述接料口分别连接有所述输料管,每个所述输料管分别连接有所述排肥管,每个所述排肥管远离各自对应的所述输料管的另一端分别延伸至所述本体的两侧。
16、根据本发明提供的一种果园施肥机器人,所述覆土装置包括:覆土电机和两块覆土板,所述覆土电机能够驱动两块所述覆土板相互开合。
17、根据本发明提供的一种果园施肥机器人,所述覆土装置还包括覆土支撑架,所述覆土支撑架包括竖杆和横杆,所述竖杆的一端连接至所述本体,另一端垂直连接至所述横杆的中部,所述横杆沿所述本体的宽度方向延伸设置,两个所述覆土电机分别连接至所述横杆的两端。
18、根据本发明的第二方面,提供了一种用于根据本发明的第一方面中任一项所述的果园施肥机器人的施肥控制方法,所述施肥控制方法包括:
19、通过摄像装置探测所述本体两侧的果树,获取果树的特征信息,所述特征信息包括果树的树干位置和冠层轮廓;
20、根据果树的特征信息,获取对应于每个果树的施肥位置;
21、利用移动装置让果园施肥机器人沿着预定的方向移动,当打孔装置到达施肥位置之后,控制打孔装置在当前的施肥位置打下施肥孔;
22、控制排肥装置向当前的施肥孔投放肥料;
23、利用移动装置让果园施肥机器人沿着预定的方向移动,当覆土装置到达投放有肥料的施肥孔所在的位置之后,控制覆土装置对当前的施肥孔进行覆土处理。
24、本发明提供的果园施肥机器人包括,本体、移动装置、摄像装置、打孔装置、排肥装置、覆土装置和控制装置,在控制装置的控制作用下,该果园施肥机器人可以获取果树树干位置和冠层轮廓位置等特征信息,之后,根据这些特征信息确定对应于每个果树的施肥点,再将肥料精准地投放至施肥点中,确保果树能够有效地吸收肥料,同时保证肥料的利用率。而且,该果园施肥机器人可以实现定点打孔-变量施肥-自动覆土一体化作业。
技术特征:1.一种果园施肥机器人,其特征在于,包括:本体、移动装置、摄像装置、打孔装置、排肥装置、覆土装置和控制装置,其中,
2.根据权利要求1所述的果园施肥机器人,其特征在于,所述打孔装置包括:侧推机构、纵向移动机构、打孔电机和螺纹钻头,所述侧推机构连接至所述本体,所述纵向移动机构连接至所述侧推机构,所述打孔电机连接至所述纵向移动机构,所述螺纹钻头连接至所述打孔电机的输出端,
3.根据权利要求2所述的果园施肥机器人,其特征在于,所述纵向移动机构包括纵向滑轨和纵向滑座,所述纵向滑轨连接至所述侧推机构,所述纵向滑座连接至所述纵向滑轨并能够沿竖直方向移动,所述打孔电机连接至所述纵向滑座。
4.根据权利要求1所述的果园施肥机器人,其特征在于,所述排肥装置包括:储料箱、输料管、轴流风机和排肥管,
5.根据权利要求4所述的果园施肥机器人,其特征在于,所述排肥装置还包括:
6.根据权利要求5所述的果园施肥机器人,其特征在于,所述排肥槽轮沿其长度方向设置有多个隔板,相邻的两个所述隔板之间形成有接料仓,每个所述接料仓中设置有多个沿径向方向向外延伸的分隔板,每个所述接料仓中的多个所述分隔板将当前的所述接料仓分隔成多个沿周向方向间隔设置的接料单元,所述接料口设置在靠近所述接料单元的位置。
7.根据权利要求5所述的果园施肥机器人,其特征在于,所述排肥槽轮的数量为两个,两个所述排肥槽轮分别连接所述驱动电机,每个所述排肥槽轮分别对应设置有所述接料口,每个所述接料口分别连接有所述输料管,每个所述输料管分别连接有所述排肥管,每个所述排肥管远离各自对应的所述输料管的另一端分别延伸至所述本体的两侧。
8.根据权利要求1所述的果园施肥机器人,其特征在于,所述覆土装置包括:覆土电机和两块覆土板,所述覆土电机能够驱动两块所述覆土板相互开合。
9.根据权利要求8所述的果园施肥机器人,其特征在于,所述覆土装置还包括覆土支撑架,所述覆土支撑架包括竖杆和横杆,所述竖杆的一端连接至所述本体,另一端垂直连接至所述横杆的中部,所述横杆沿所述本体的宽度方向延伸设置,两个所述覆土电机分别连接至所述横杆的两端。
10.一种用于如权利要求1至9中任一项所述的果园施肥机器人的施肥控制方法,其特征在于,所述施肥控制方法包括:
技术总结本发明提供一种果园施肥机器人和施肥控制方法,涉及农业种植设备技术领域,果园施肥机器人包括:本体、移动装置、摄像装置、打孔装置、排肥装置、覆土装置和控制装置,控制装置配置为:根据摄像装置获取的特征信息,确定每个果树的施肥位置,控制移动装置移动,让打孔装置到达施肥位置并打下施肥孔,控制排肥装置将肥料投放施肥孔中,最后控制覆土装置对施肥孔进行覆土作业。由此,该果园施肥机器人可以获取果树树干位置和冠层轮廓位置等特征信息,之后根据这些特征信息确定对应于每个果树的施肥点,再将肥料精准地投放至施肥点中,确保果树能够有效地吸收肥料,同时保证肥料的利用率,而且可实现定点打孔‑变量施肥‑自动覆土一体化作业。技术研发人员:窦汉杰,郑康,翟长远,杨硕,秦向阳,张焱龙受保护的技术使用者:北京市农林科学院信息技术研究中心技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240614/102273.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。