一种蔬菜大棚自动采摘系统及自动采摘方法
- 国知局
- 2024-07-12 13:17:12
本发明属于农业自动化,具体涉及一种蔬菜大棚自动采摘系统及自动采摘方法。
背景技术:
1、随着新农业生产模式和新技术的不断发展与应用,蔬菜大棚的普及程度越来越高,然而现有蔬菜大棚中的农作物在生长成熟后仍采用的是传统人工采摘模式。在这种人工采摘模式下:
2、一方面需要采摘工作人员人为判断蔬菜是否成熟,由此便会很容易采摘到未成熟或者已经过于成熟的蔬菜;
3、另一方面在现代社会农民平均年龄不断增大、体力逐渐下降的趋势下,传统的人工采摘明显存在着成本高、劳动强度大、效率低等问题;
4、综上可知,如何对蔬菜大棚内成熟的蔬菜进行及时自动采摘,是本领域技术人员亟待解决的重要问题。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,本发明的目的在于提供一种蔬菜大棚自动采摘系统及自动采摘方法。
2、为实现上述目的,本发明提供如下技术方案:
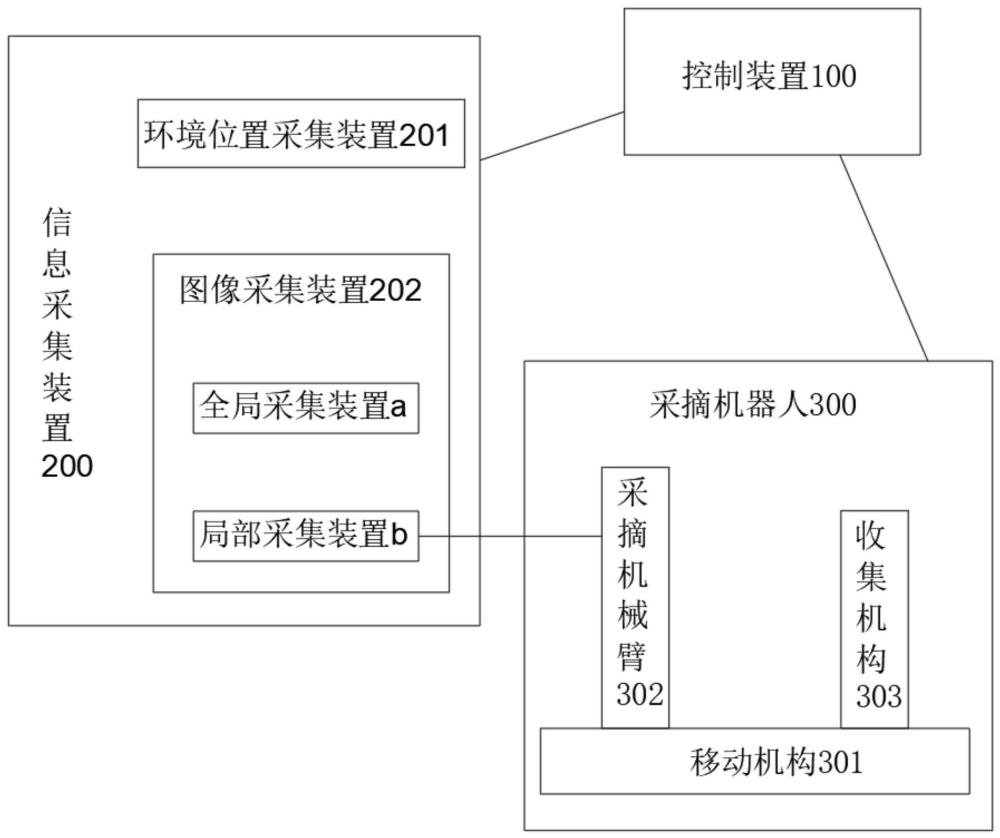
3、一种蔬菜大棚自动采摘系统,包括控制装置以及与所述控制装置通信连接的信息采集装置与采摘机器人;
4、所述信息采集装置用于采集蔬菜大棚内的蔬菜生长信息;
5、所述控制装置用于接收并根据所述蔬菜生长信息生成采摘控制指令,还用于向所述采摘机器人下发所述采摘控制指令;
6、所述采摘机器人用于根据所述采摘控制指令采摘蔬菜大棚内的蔬菜。
7、优选的,所述蔬菜生长信息包括生长位置信息和生长图像信息。
8、优选的,所述采摘控制指令至少包括采摘路径、采摘模式及采摘力度,且所述采摘模式至少包括根茎采摘与果实采摘。
9、优选的,所述采摘机器人包括移动机构以及安装于所述移动机构上的采摘机械臂,所述移动机构用于沿所述采摘路径移动,所述采摘机械臂用于根据所述采摘模式与采摘力度采摘位于所述采摘路径上的目标蔬菜。
10、优选的,所述采摘机器人还包括安装于所述移动机构上的收集机构,且所述收集机构位于所述采摘机械臂的活动范围内、并用于收集放置由所述采摘机械臂采摘得到的目标蔬菜。
11、优选的,所述信息采集装置包括环境位置采集装置和图像采集装置,且所述图像采集装置包括安装于蔬菜大棚上的全局采集装置以及安装于所述采摘机械臂末端的局部采集装置。
12、作为一个总得发明构思,本发明还提供如下技术方案:
13、一种蔬菜大棚自动采摘方法,包括:
14、获取蔬菜大棚内的蔬菜生长信息;
15、根据所述蔬菜生长信息生成采摘控制指令;
16、根据所述采摘控制指令采摘蔬菜大棚内的蔬菜。
17、优选的,所述蔬菜生长信息包括生长位置信息和生长图像信息,且所述生长图像信息包括全局图像信息和局部图像信息。
18、优选的,生成所述采摘控制指令时,包括:
19、根据所述生长位置信息与所述全局图像信息生成采摘路径;
20、根据所述全局图像信息与所述局部图像信息识别位于所述采摘路径上的目标蔬菜的种类,并根据所述目标蔬菜的种类限定生成采摘模式,且所述采摘模式至少包括根茎采摘与果实采摘;
21、根据所述局部图像信息识别所述目标蔬菜的成熟度与体积大小,并根据所述目标蔬菜的成熟度与体积大小限定生成采摘力度。
22、优选的,采摘所述蔬菜大棚内的蔬菜时,包括:
23、根据所述采摘路径定位目标采摘位置;
24、匹配所述目标采摘位置处的目标采摘模式与目标采摘力度,并根据所述目标采摘模式与目标采摘力度采摘种植于所述目标采摘位置处的目标蔬菜。
25、本发明与现有技术相比,具有以下有益效果:
26、本发明的自动采摘系统,能够自动采集蔬菜大棚内各种蔬菜的详细生长信息,并且能够根据该生长信息自动定位目标蔬菜的对应位置,然后即可借助采摘机器人完成目标蔬菜的自动采摘,无需人工操作,自动化程度高并且能够有效提升采摘效率。
27、蔬菜的详细生长信息由生长位置信息、全局图像信息和局部图像信息组合构成,并且根据不同信息的相互配合能够智能生成采摘路径、采摘模式及采摘力度等控制指令,基于此,采摘机器人在实际采摘时,便可能够依据各种蔬菜的详细生长信息进行不同采摘模式及采摘力度的自适应调整,从而有效降低采摘过程中目标蔬菜的损坏概率。
技术特征:1.一种蔬菜大棚自动采摘系统,其特征在于,包括控制装置以及与所述控制装置通信连接的信息采集装置与采摘机器人;
2.根据权利要求1所述的蔬菜大棚自动采摘系统,其特征在于:所述蔬菜生长信息包括生长位置信息和生长图像信息。
3.根据权利要求2所述的蔬菜大棚自动采摘系统,其特征在于:所述采摘控制指令至少包括采摘路径、采摘模式及采摘力度,且所述采摘模式至少包括根茎采摘与果实采摘。
4.根据权利要求3所述的蔬菜大棚自动采摘系统,其特征在于:所述采摘机器人包括移动机构以及安装于所述移动机构上的采摘机械臂,所述移动机构用于沿所述采摘路径移动,所述采摘机械臂用于根据所述采摘模式与采摘力度采摘位于所述采摘路径上的目标蔬菜。
5.根据权利要求4所述的蔬菜大棚自动采摘系统,其特征在于:所述采摘机器人还包括安装于所述移动机构上的收集机构,且所述收集机构位于所述采摘机械臂的活动范围内、并用于收集放置由所述采摘机械臂采摘得到的目标蔬菜。
6.根据权利要求4或5所述的蔬菜大棚自动采摘系统,其特征在于:所述信息采集装置包括环境位置采集装置和图像采集装置,且所述图像采集装置包括安装于蔬菜大棚上的全局采集装置以及安装于所述采摘机械臂末端的局部采集装置。
7.一种蔬菜大棚自动采摘方法,其特征在于,包括:
8.根据权利要求7所述的蔬菜大棚自动采摘方法,其特征在于:所述蔬菜生长信息包括生长位置信息和生长图像信息,且所述生长图像信息包括全局图像信息和局部图像信息。
9.根据权利要求8所述的蔬菜大棚自动采摘方法,其特征在于:生成所述采摘控制指令时,包括:
10.根据权利要求9所述的蔬菜大棚自动采摘方法,其特征在于:采摘所述蔬菜大棚内的蔬菜时,包括:
技术总结本发明属于农业自动化技术领域,公开了一种蔬菜大棚自动采摘系统及自动采摘方法,所述自动采摘系统包括控制装置以及与所述控制装置通信连接的信息采集装置与采摘机器人;所述信息采集装置用于采集蔬菜大棚内的蔬菜生长信息;所述控制装置用于接收并根据所述蔬菜生长信息生成采摘控制指令,还用于向所述采摘机器人下发所述采摘控制指令;所述采摘机器人用于根据所述采摘控制指令采摘蔬菜大棚内的蔬菜。综上可知,本发明能够自动采集蔬菜大棚内各种蔬菜的详细生长信息,并且能够根据该生长信息自动定位目标蔬菜的对应位置,然后即可借助采摘机器人完成目标蔬菜的自动采摘,无需人工操作,自动化程度高并且能够有效提升采摘效率。技术研发人员:李学宝,刘爱军,马占飞,赵文军,焦上哲,李旺,王续然受保护的技术使用者:内蒙古科技大学包头师范学院技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/104177.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。