一种基于自校正点扩散函数的三维光声显微成像方法
- 国知局
- 2024-07-12 10:26:03
本发明涉及光声显微成像,更具体地,涉及一种基于自校正点扩散函数的三维光声显微成像方法。
背景技术:
1、作为新陈代谢过程中关键的功能单位,血液微循环系统的生理状态可以监测许多疾病,包括糖尿病、高血压和冠心病等。此外,在临床实践上,研究微循环可以评估在血管疾病存在下组织灌注效果;在临床前研究上,研究微循环可以检测药物开发中的治疗效果。目前,已有很多互补的成像技术用于研究微循环,包括甲襞毛细血管镜检查、偏振光谱成像、高频超声成像和磁共振成像等。然而,它们都不能在单一模式中同时提供所需的灵敏度、分辨率和成像深度。
2、光声显微成像(photoacoustic microscopy pam)技术的出现解决了上述问题。该技术凭借非电离、非侵入和多尺度等特性,推动着生命科学研究与医学影像应用的快速发展。一方面,它具有比光学成像更强的穿透能力;另一方面,它相比于超声成像呈现生物组织更丰富的散射和吸收信息。结合光学和声学特性,已成为微循环的结构和功能成像的可行工具;但是,现有的光声显微成像方法,仍然存在成像误差大、精度不够高,导致医疗误诊。
3、为获取微血管网络的三维结构信息,需要克服离焦区成像模糊的困难。该难点主要是两种原因造成的:器件加工精细度、光路设计存在缺陷和搭建对准误差引入了像差;聚焦光斑尺寸的固有特性,随着离焦距离的增加弥散圆也逐渐增大。在空间上的失校正,将影响到结构细节信息的准确显示,进而导致医疗误诊。如何优化光声显微成像的图像采集及校正处理方法,以实现重构被测物精确的三维结构图,是亟待解决的问题。
技术实现思路
1、本发明为克服上述现有技术中的缺陷,提供一种基于自校正点扩散函数的三维光声显微成像方法,有效提高了光声显微成像的精度。
2、为解决上述技术问题,本发明采用的技术方案是:
3、一种基于自校正点扩散函数的三维光声显微成像方法,包括以下步骤:
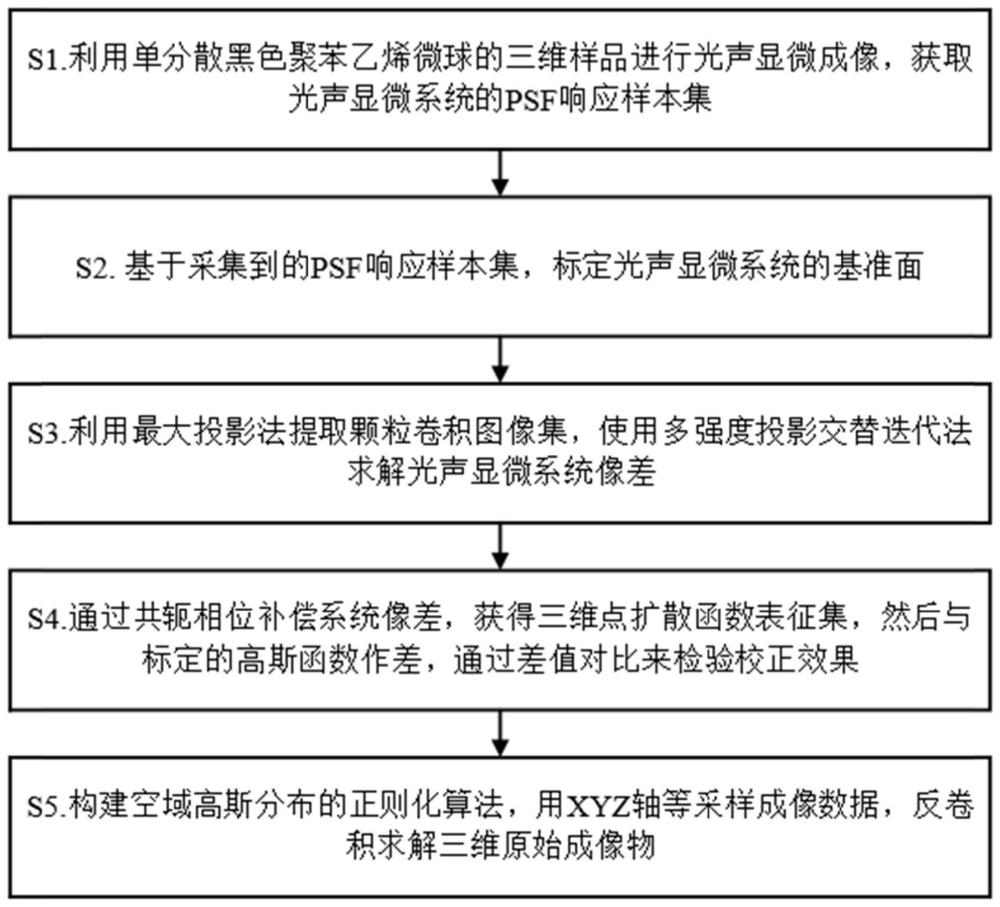
4、s1.利用单分散黑色聚苯乙烯微球的三维样品进行光声显微成像,获取光声显微系统的psf响应样本集;
5、s2.基于采集到的psf响应样本集,标定光声显微系统的基准面;
6、s3.利用最大投影法提取颗粒卷积图像集,使用多强度投影交替迭代法求解光声显微系统像差;
7、s4.通过共轭相位补偿系统像差,获得三维点扩散函数表征集,然后与标定的高斯函数作差,通过差值对比来检验校正效果;
8、s5.构建空域高斯分布的正则化算法,用xyz轴等采样成像数据,反卷积求解三维原始成像物。
9、根据上述技术手段,在本发明中,一方面,对于像差的引入问题,在光路中附加空间光调制器加载共轭相位在数值上补偿来进行校正。另一方面,对于弥散圆的固有问题,通过测量黑色聚苯乙烯微球在不同离焦量的激发响应图,建立三维成像模糊核堆栈,借助反卷积算法从失真的图像中恢复出原始信号。本发明在综合考虑两种造成离焦区成像模糊问题的前提下,提高聚焦光源质量并逆滤波失真数据,以准确提供微循环网络的三维结构信息。综上,本发明能有效补偿光声系统的像差,与非自校正的重建成像技术相比,点扩散函数集的获取不易受实验测量误差的影响,提升成像质量。进而求解出微循环真实的三维细节信息,极大得提高了pam的性能指标。
10、在其中一个实施例中,所述步骤s1具体包括:
11、s11.根据光声耦合透镜计算光声显微系统的理想分辨率,选择匹配粒径大小的黑色聚苯乙烯微球溶液,稀释后,以单分散的形式固化到明胶中;
12、s12.使用高精度亚微米电机,对目标样本进行等间距三维采样,获得psf响应样本集。z轴即光声信号的采样间隔时间乘以声信号在样本中传播的平均速度。xy轴为电机二维扫描方向。
13、在其中一个实施例中,所述步骤s2中标定光声显微系统的基准面包括:成像区域为以对焦面为基准,离焦区为上下对称的三维空间;根据激光聚焦原理,光斑尺寸最小的t轴位置对应于z=0。
14、在其中一个实施例中,所述步骤s3中使用多强度投影交替迭代法求解光声显微系统像差包括:
15、s31.对所提取的颗粒卷积图像集,选用最大2d灰度图像的堆栈作为卷积投影观测集;
16、s32.获得随机初始对焦面光场分布,光场分布的相位部分乘以观测集内随机传输因子传递至正离焦面;进行二维傅里叶变换,保留变换后的相位,用正离焦面的观测值代替幅度值;进行傅里叶逆变换,光场分布的相位部分乘以逆随机传输因子传递至负离焦面;
17、s33.在傅里叶逆变换后的光场分布下,进行二维傅里叶变换,保留变换后的相位,用正离焦面的观测值代替幅度值;进行傅里叶逆变换,光场分布的相位部分乘以逆随机传输因子传递至负离焦面;
18、s34.重复步骤s32和s33,传递至负焦面则完成相位迭代的一次循环;每次迭代结束时计算损失函数,判断是否满足自定义阈值的迭代收敛条件;
19、s35.如果满足迭代收敛条件,则停止迭代;如果不满足迭代的收敛条件,且小于达到设定的最大迭代次数,则继续迭代操作,从而得到对焦面的相位信息;
20、其中,在每一次迭代的过程中,系统像差波前均选用前36项泽尼克多项式表示,随机赋予各项归一化初始值,波前表示的归一化系数以波长作为最大初始值;即相位变化2π,归一化系数为1。如532nm,波前像素点的权重系数应小于等于532。
21、在其中一个实施例中,所述损失函数定义为傅里叶变换后的光场幅值fft(xij)与观测值yij之间的欧氏距离;损失函数表达为:
22、
23、式中,n代表第几个像素,i代表像素横坐标,j代表像素纵坐标。
24、在其中一个实施例中,在所述步骤s3中,每次迭代的远场平面帧数大于等于三个,包括对焦面,正离焦面和负离焦面。
25、在其中一个实施例中,所述步骤s4中通过共轭相位补偿系统像差包括:在空间光调制器上加载共轭相位来补偿像差,与对焦面相位相比,共轭相位具有相同的频率,且其空间复振幅为空间复振幅的复共轭。
26、在其中一个实施例中,所述高斯函数为
27、
28、式中,σ是标准方差,x像素横坐标,y像素纵坐标。
29、在其中一个实施例中,为避免图像边缘产生伪影,需要在空域构建基于正则化约束的反卷积算法。因为,在频域中卷积操作是全循环的,但这种假设在图像边缘通常是错误的。所述步骤s5包括:
30、采用贝叶斯最大后验估计表述图像复原问题,根据成像数据y来求解原始信息x表示为一个最小化问题;正则化算法公式表达为:
31、
32、式中,cf表示卷积矩阵,w=αη2,其中,η2是噪声的方差,α是权重因子,n表示水平和垂直方向梯度滤波器,即gx=[1-1]和gy=[1-1]t;考虑噪声呈高斯先验分布情况,简化ρ(z)为|z|2。
33、在另一个实施例中,本发明还提供一种计算机设备,包括存储器和处理器,所述的存储器存储有计算机程序,所述的处理器执行所述的计算机程序时实现以上所述方法的步骤。
34、与现有技术相比,有益效果是:本发明提供的一种基于自校正点扩散函数的三维光声显微成像方法,能有效补偿光声系统的像差,与非自校正的重建成像技术相比,点扩散函数集的获取不易受实验测量误差的影响,提升成像质量。进而求解出微循环真实的三维细节信息,极大得提高了pam的性能指标。
本文地址:https://www.jishuxx.com/zhuanli/20240614/86893.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表