腕关节康复机器人、控制方法、系统及存储介质
- 国知局
- 2024-07-12 10:36:21
本发明涉及康复机器人,尤其是涉及一种腕关节康复机器人、控制方法、系统及存储介质。
背景技术:
1、腕关节康复器一般包括穿戴式和平台式两种,平台式相较于穿戴式其运动空间更加复杂,但覆盖范围更广,能够实现更细致的运动,且可控性更强。
2、目前的腕关节康复器一般具有足够的自由度,但只能实现运动功能,人机交互性较差,且刚性较大,容易对患者施加较大的载荷,使得患者使用过程的舒适性较差,甚至有可能造成二次损伤。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种腕关节康复机器人、控制方法、系统及存储介质,具有提高舒适性、可控性强的优点。
2、本发明的目的采用如下技术方案实现:
3、根据本发明公开实施例的第一方面,提供一种腕关节康复机器人,包括:
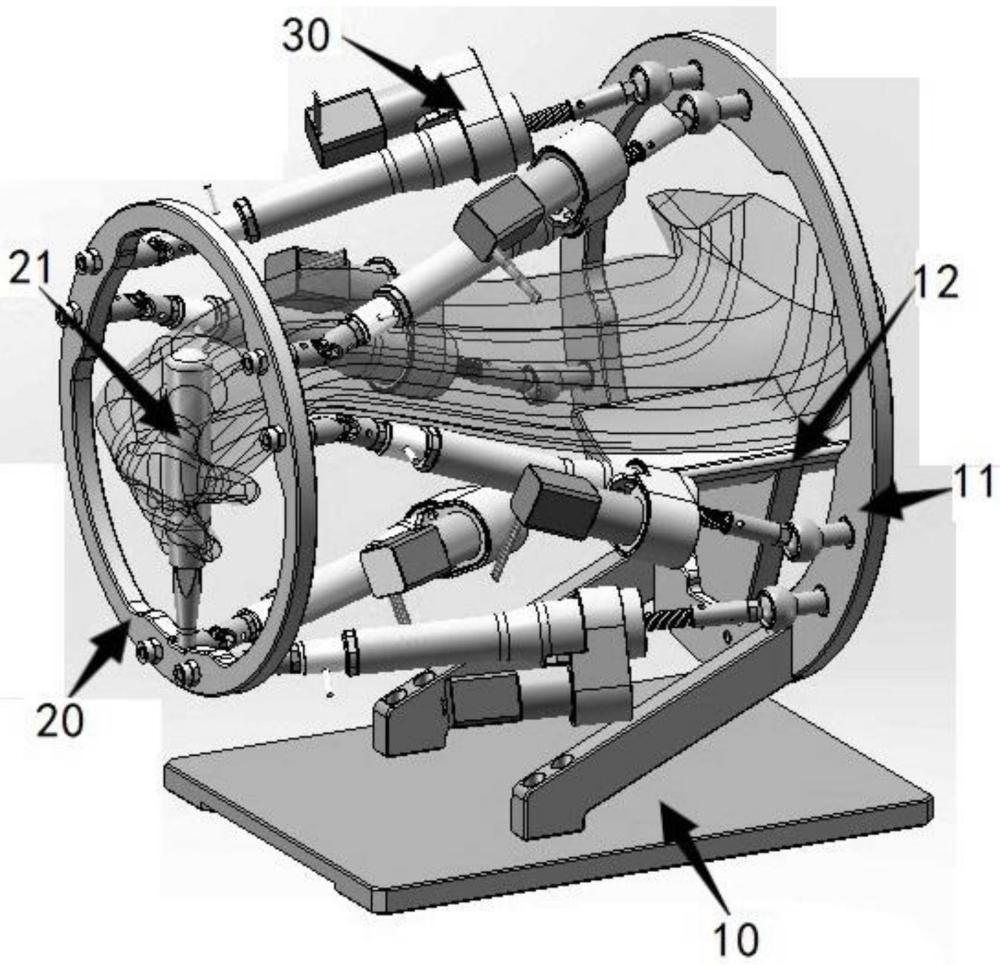
4、支撑底板,所述支撑底板上竖直设置有第一支撑环架,所述第一支撑环架内设有用于搁置臂部的手托板;
5、第二支撑环架,所述第二支撑环架内设有用于供手握持的手柄部;
6、至少三组均匀设置于所述第一支撑环架和第二支撑环架之间的伺服伸缩杆件,每组伺服伸缩杆件包括两根第一端铰接连接于所述第一支撑环架、第二端铰接连接于所述第二支撑环架,且位于同一组的所述伺服伸缩杆件的第一端靠近设置、位于相邻组临近的所述伺服伸缩杆件的第二端靠近设置、以使每相邻两伺服伸缩杆件形成“v”型结构,所述伺服伸缩杆件能够伸缩移动以使所述第二支撑环架前后移动和/或旋转运动,且所述伺服伸缩杆件上设有用于采集实时轴向力的轴向力传感器;以及,
7、控制装置,所述控制装置用于依据所述实时轴向力控制所述伺服伸缩杆件的伸缩距离。
8、实现上述技术方案,使用时,患者手臂穿过第一支撑环架并握持住手柄部,再将臂部搁置在手托板上,随后由控制装置按照预定控制程序控制各伺服伸缩杆件伸缩移动,再伺服伸缩杆件伸缩移动的过程中即可带动第二支撑环架作前后移动或者旋转运动或者同步进行移动和旋转运动,进而带动腕关节进行康复活动,同时在伺服伸缩杆件伸缩移动的过程中通过轴向力传感器检测实时轴向力,由于腕关节在活动过程中也会产生反作用力传递给轴向力传感器,从而根据实时轴向力调整伺服伸缩杆件的伸缩量,能够使腕关节以合适幅度和轨迹进行康复训练,从而提高整体的舒适性,且可控性更强。
9、在一些示例性的实施方式中,所述伺服伸缩杆组包括:
10、缸体,所述缸体上转动连接有驱动环;
11、滑动式装配于所述缸体、且螺纹连接于所述驱动环以在所述缸体内伸缩运动的活动杆;以及,
12、承载于所述缸体用于驱动所述驱动环转动、以使所述活动杆伸缩移动的伺服驱动机构。
13、实现上述技术方案,通过伺服驱动机构带动驱动环转动,进而使活动杆实现螺纹传动而在缸体内伸缩移动。
14、在一些示例性的实施方式中,所述伺服驱动机构包括:固定于所述缸体的伺服电机、固定于所述伺服电机的动力输出轴的主动齿轮、以及固定于所述驱动环且与所述主动齿轮相啮合的从动齿轮。
15、实现上述技术方案,通过伺服电机带动主动齿轮转动,进而啮合从动齿轮带动驱动环转动,实现活动杆的螺纹传动。
16、在一些示例性的实施方式中,所述缸体的端部设有第一铰接件,所述第一铰接件连接于所述第二支撑环架,所述轴向力传感器设置于所述缸体与所述第一铰接件之间;所述活动杆的端部设有第二铰接件,所述第二铰接件连接于所述第一支撑环架。
17、实现上述技术方案,通过第一铰接件实现伺服伸缩杆件第二端与第二支撑环架的铰接连接,通过第二铰接件实现伺服伸缩杆件第一端与第一支撑环架的铰接连接。
18、在一些示例性的实施方式中,所述第一铰接件和第二铰接件为万向球铰链或者十字铰链。
19、根据本发明公开实施例的第二方面,提供一种控制如第一方面所述的腕关节康复机器人的方法,包括:
20、获取患者腕关节病症数据,并根据所述腕关节病症数据生成包含运动轨迹的第一运动策略;
21、待患者握持手柄部后按照所述第一运动策略控制各所述伺服伸缩杆件伸缩移动以形成所述运动轨迹;
22、在移动过程中反馈各所述轴向力传感器采集的实时轴向力,并将所述实时轴向力与预设阈值相比较生成比较结果;
23、根据所述比较结果对应形成各伺服伸缩杆件的移动偏差值,并依据所述移动偏差值调整所述运动轨迹生成第二运动策略。
24、实现上述技术方案,患者首次进行腕关节康复训练时,先根据腕关节病症数据规划对应病症的运动轨迹,依据第一运动策略控制各伺服伸缩杆件进行伸缩移动以形成该运动轨迹,随后在移动过程中通过轴向力传感器采集和反馈实时轴向力,由于不同患者的腕关节和握持手势会有所区别,在实际移动过程中产生的运动轨迹会与初始规划的运动轨迹有所区别,因此可以通过实时轴向力与预设阈值的比较结果计算得到相应的移动偏差值,进而调整运动轨迹使其能更加匹配当前患者的康复运动,防止对患者腕关节造成二次伤害,提高整体使用的舒适度。
25、在一些示例性的实施方式中,所述根据所述腕关节病症数据生成包含运动轨迹的第一运动策略具体包括:
26、获取患者腕部的模型参数,并根据所述模型参数生成腕部3d模型;
27、根据所述腕关节病症数据在所述腕部3d模型中标记病症位置;
28、获取患者康复训练动作参数,并根据所述动作参数在所述腕部3d模型中仿真模拟腕部运动并形成模拟运动参数;
29、根据所述模拟运动参数和腕关节康复机器人的尺寸参数生成第一运动策略,所述第一运动策略包括控制手腕按照模拟运动参数移动的运动轨迹。
30、实现上述技术方案,通过建立腕部3d模型并标记病症位置,从而方便医护人员设计规划患者的康复训练动作,这些康复训练动作可以对应腕部3d模型以康复训练动作参数的形式呈现,再根据这些康复训练动作参数进行仿真模拟腕部运行,可以初步判断腕部运动过程以供医护人员参考是否需要调整康复训练动作,待康复训练动作确认无需调整后,即可对应形成模拟运动参数,并结合腕关节康复机器人的尺寸参数生成第一运动策略,使得腕关节机器人能够带动腕关节按照设定的运动轨迹移动进行康复训练。
31、在一些示例性的实施方式中,所述依据所述移动偏差值调整所述运动轨迹生成第二运动策略具体包括:
32、根据所述移动偏差值进行补偿计算以得到各伺服伸缩杆件的修正伸缩量;
33、根据所述修正伸缩量得到各伺服伸缩杆件的实际伸缩量及伸缩变化周期;
34、依据所述实际伸缩量及伸缩变化周期生成实际运动参数,并依据所述实际运动参数调整所述运动轨迹生成第二运动策略。
35、根据本发明公开实施例的第三方面,提供一种腕关节康复机器人控制方法,包括:
36、数据获取单元,用于获取患者腕关节病症数据,并根据所述腕关节病症数据生成包含运动轨迹的第一运动策略;
37、运动控制单元,用于待患者握持手柄部后按照所述第一运动策略控制各所述伺服伸缩杆件伸缩移动以形成所述运动轨迹;
38、反馈比较单元,用于在移动过程中反馈各所述轴向力传感器采集的实时轴向力,并将所述实时轴向力与预设阈值相比较生成比较结果;
39、调整控制单元,用于根据所述比较结果对应形成各伺服伸缩杆件的移动偏差值,并依据所述移动偏差值调整所述运动轨迹生成第二运动策略。
40、根据本发明公开实施例的第四方面,提供一种存储有计算机可读指令的存储介质,所述计算机可读指令被一个或多个处理器执行时,使得一个或多个处理器执行如第二方面所述控制方法的步骤。
41、综上所述,相比现有技术,本发明具有如下有益效果:
42、本发明实施例通过提供一种腕关节康复机器人、控制方法、系统及存储介质,使用时,患者手臂穿过第一支撑环架并握持住手柄部,再将臂部搁置在手托板上,随后由控制装置按照预定控制程序控制各伺服伸缩杆件伸缩移动,再伺服伸缩杆件伸缩移动的过程中即可带动第二支撑环架作前后移动或者旋转运动或者同步进行移动和旋转运动,进而带动腕关节进行康复活动,同时在伺服伸缩杆件伸缩移动的过程中通过轴向力传感器检测实时轴向力,由于腕关节在活动过程中也会产生反作用力传递给轴向力传感器,从而根据实时轴向力调整伺服伸缩杆件的伸缩量,能够使腕关节以合适幅度和轨迹进行康复训练,从而提高整体的舒适性,且可控性更强。
本文地址:https://www.jishuxx.com/zhuanli/20240614/87970.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表