一种机器人辅助宫腔镜手术系统专用宫颈钳的制作方法
- 国知局
- 2024-07-12 10:40:18
本技术涉及宫颈钳领域,具体为一种机器人辅助宫腔镜手术系统专用宫颈钳。
背景技术:
1、宫颈钳是宫腔镜手术中常用的手术器械。按照正规手术流程,在手术开始之前,需要放置阴窥器暴露阴道和宫颈,然后用宫颈钳前端钳夹于宫颈阴道部,通常在9-11点处。宫腔镜手术使用宫颈钳的目的是:在手术操作过程中固定宫颈,使得宫颈的位置保持相对恒定,不随着子宫收缩、器械活动、阴窥器位置改变等而出现明显的变化。
2、但是,机器人宫腔镜手术系统不同于传统的宫腔镜手术系统,对于宫颈钳的外观、功能、应用都提出了新的要求。为使得宫颈钳更适用于机器人宫腔镜手术系统,因此我们提出一种机器人辅助宫腔镜手术系统专用宫颈钳。
技术实现思路
1、本实用新型要解决的技术问题是克服现有技术的缺陷,提供一种机器人辅助宫腔镜手术系统专用宫颈钳,为了解决上述技术问题,本实用新型提供了如下的技术方案:
2、本实用新型一种机器人辅助宫腔镜手术系统专用宫颈钳,包括半钳体一和半钳体二,所述半钳体一和半钳体二的中点均铰接在转轴上,使得半钳体一和半钳体二能够以转轴为旋转轴进行相互开合,所述半钳体一和半钳体二的尾端均固定有手柄,所述半钳体一靠近手柄的一段上设置有感应器和90°旋转结构,所述半钳体二靠近手柄的一段上设置有可拆卸结构。
3、优选的,所述半钳体一和半钳体二远离对应手柄的一端均设置有齿状结构,且两个所述齿状结构相对设置。
4、优选的,所述半钳体一上靠近齿状结构处设置有定位装置。
5、优选的,所述感应器和90°旋转结构分别位于半钳体一后半段的中上三分之一处、中下三分之一处。
6、优选的,所述可拆卸结构位于半钳体二后半段的中上三分之一处。
7、优选的,所述半钳体一和半钳体二的长度大于14cm。
8、与现有技术相比,本实用新型所达到的有益效果是:通过通过操作两个手柄使得半钳体一和半钳体二绕转轴进行相互开合,操作简单便捷,半钳体一和半钳体二端头处的齿状结构用以夹持宫颈组织,后半段主要起到固定和抓持的作用,其中半钳体二的后半段采用可拆卸结构进行可拆卸设计,该目的是为了避免宫颈钳在术中与导光束、水管碰撞,半钳体一后半段利用90°旋转结构可进行90°旋转的功能操作,目的是为了避免宫颈钳在术中与导光束、水管碰撞,半钳体一后半段上设置的感应器具有感知钳体所受拉力的作用,半钳体一后半段手柄处可与手术床相连,半钳体一前半段钳体夹持宫颈处设置有定位装置,以便准确判断镜头在宫颈或宫腔的位置。
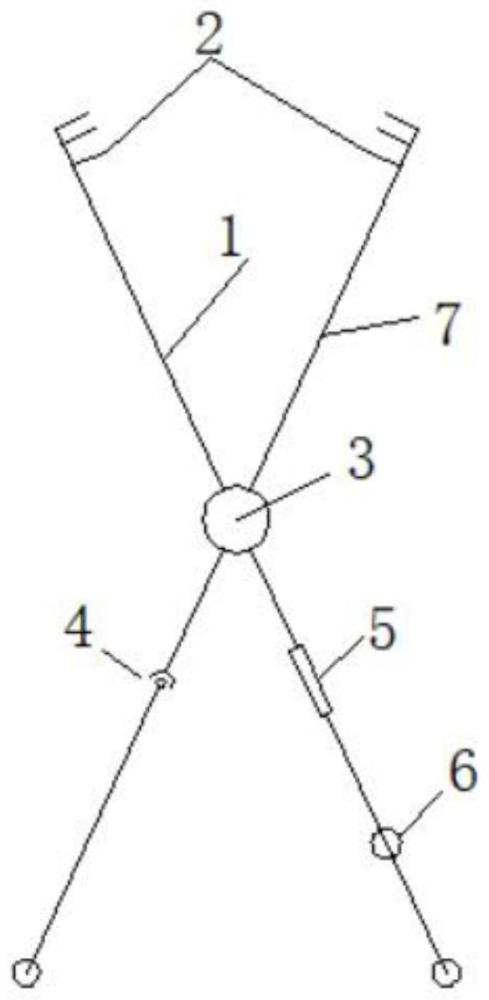
技术特征:1.一种机器人辅助宫腔镜手术系统专用宫颈钳,包括半钳体一(1)和半钳体二(7),其特征在于:所述半钳体一(1)和半钳体二(7)的中点均铰接在转轴(3)上,使得半钳体一(1)和半钳体二(7)能够以转轴(3)为旋转轴进行相互开合,所述半钳体一(1)和半钳体二(7)的尾端均固定有手柄,所述半钳体一(1)靠近手柄的一段上设置有感应器(5)和90°旋转结构(6),所述半钳体二(7)靠近手柄的一段上设置有可拆卸结构(4)。
2.如权利要求1所述的机器人辅助宫腔镜手术系统专用宫颈钳,其特征在于:所述半钳体一(1)和半钳体二(7)远离对应手柄的一端均设置有齿状结构(2),且两个所述齿状结构(2)相对设置。
3.如权利要求2所述的机器人辅助宫腔镜手术系统专用宫颈钳,其特征在于:所述半钳体一(1)上靠近齿状结构处设置有定位装置。
4.如权利要求1所述的机器人辅助宫腔镜手术系统专用宫颈钳,其特征在于:所述感应器(5)和90°旋转结构(6)分别位于半钳体一(1)后半段的中上三分之一处、中下三分之一处。
5.如权利要求1所述的机器人辅助宫腔镜手术系统专用宫颈钳,其特征在于:所述可拆卸结构(4)位于半钳体二(7)后半段的中上三分之一处。
6.如权利要求1所述的机器人辅助宫腔镜手术系统专用宫颈钳,其特征在于:所述半钳体一(1)和半钳体二(7)的长度大于14cm。
技术总结本技术公开了一种机器人辅助宫腔镜手术系统专用宫颈钳,包括半钳体一和半钳体二,所述半钳体一和半钳体二的中点均铰接在转轴上,使得半钳体一和半钳体二能够以转轴为旋转轴进行相互开合,所述半钳体一和半钳体二的尾端均固定有手柄,所述半钳体一靠近手柄的一段上设置有感应器和90°旋转结构,所述半钳体二靠近手柄的一段上设置有可拆卸结构。该种机器人辅助宫腔镜手术系统专用宫颈钳,操作简单便捷,避免宫颈钳在术中与导光束、水管产生碰撞,半钳体一后半段上设置的感应器具有感知钳体所受拉力的作用,半钳体一后半段手柄处可与手术床相连,半钳体一前半段钳体夹持宫颈处设置有定位装置,以便准确判断镜头在宫颈或宫腔的位置。技术研发人员:徐大宝,孙丹,王文超,徐露,何勇受保护的技术使用者:湖南科迈森医疗科技有限公司技术研发日:20231011技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240614/88427.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。