一种具有路径规划功能的扫地机器人的制作方法
- 国知局
- 2024-07-10 17:12:41
本发明涉及扫地机器人,具体为一种具有路径规划功能的扫地机器人。
背景技术:
1、扫地机器人又叫懒人扫地机,是一种能对地面进行自动吸尘的智能家用电器,因为它能对房间大小、家具摆放、地面清洁度等因素进行检测,并依靠内置的程序,制定合理的清洁路线,具备一定的智能,所以被人称之为机器人。
2、现有的扫地机器人存在的缺陷是:
3、1、专利文件us09113762b2公开了清洁机器人,但是上述文件中的清洁机器人在遇到障碍物时,统一将障碍物标记为无法清扫的区域,而导致清扫效果降低的技术问题;
4、2、专利文件us09002482b2公开了清洁机器人,但是上述文件中缺少设置有感知模块,在进行清扫时,难以检测落差较大的区域,容易造成清洁机器人摔坏或者卡住地盘的技术问题;
5、3、专利文件jp2015024166a公开了清洁机器人,但是上述文件中清洁机器人无法清楚了解自身最大通过性,容易造成卡在台阶上或者在沙发底部边缘不断徘徊尝试撞击的技术问题;
6、4、申请文件cn114355919a公开了路径规划方法、装置和扫地机器人,但是上述文件中在扫地机器人遇到无法通行或卡住情况时,无法及时联系和提醒用户进行处理,容易造成扫地机器人清理便捷性较低的技术问题。
技术实现思路
1、本发明的目的在于提供一种具有路径规划功能的扫地机器人,以解决上述背景技术中提出的技术问题。
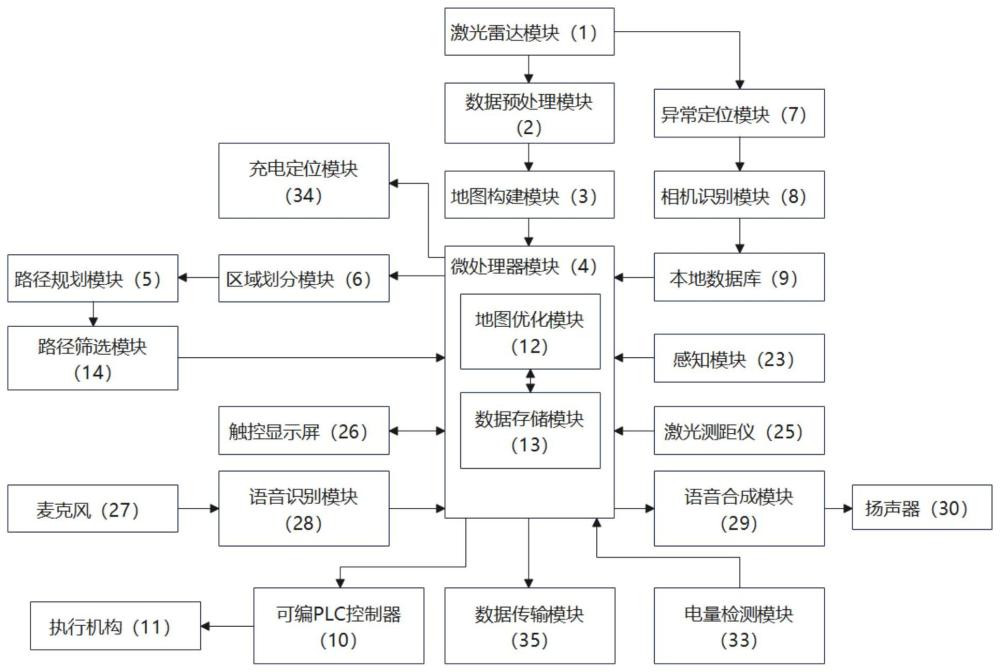
2、为实现上述目的,本发明提供如下技术方案:一种具有路径规划功能的扫地机器人,包括激光雷达模块、数据预处理模块、地图构建模块、微处理器模块和路径规划模块、实时区域划分模块、异常定位模块、相机识别模块、本地数据库和路径筛选模块,所述激光雷达模块发射激光束并接收反射回来的信号测量与周围物体的距离,并将测量获取的数据发送到数据预处理模块进行去噪、滤波和特征提取;
3、所述地图构建模块通过使用slam(同步定位与地图构建)技术通过算法将处理数据预处理模块处理后的数据生成房间的二维或三维地图,并发送到微处理器模块进行地图数据存储,所述实时区域划分模块将构建的地图划分为一个或多个待清扫子区域,所述路径规划模块根据划分的一个或多个待清扫区域生成多条无碰撞的清扫路径,所述路径筛选模块用于对多条无碰撞的清扫路径进行筛选,获取最优路径并发送到微处理器模块;
4、所述异常定位模块用于在按照路径移动时,对激光雷达模块检测到存在有遮挡物的位置进行异常区域定位,相机识别模块用于对异常区域定位进行拍摄,并将获取的拍摄数据实时发送到本地数据库内用于查询和识别拍摄画面内物品,并根据查询的数据对异常区域进行标记或擦除,将标记或擦除的数据发送到微处理器模块。
5、优选的,所述微处理器模块通过电性连接有可编plc控制器,所述可编plc控制器通过电性连接有执行机构,所述微处理器模块包括有地图优化模块、数据存储模块,地图优化模块与数据存储模块通过双向电性连接,地图优化模块用于在环境发生变化时,实时优化更新数据存储模块内的地图数据。
6、优选的,所述执行机构包括扫地机器人,所述扫地机器人包括清扫机构、电源机构、行走机构、防护机构、人机交互机构和充电机构,清扫机构用于清理地面的灰尘,电源机构用于为扫地机器人的各个模块和机构提供稳定的电源,行走机构用于调节扫地机器人的位置,防护机构用于保护扫地机器人,人机交互机构用于用户对扫地机器人进行交互控制,充电机构用于为电源机构充电。
7、优选的,所述行走机构包括第一滚轮,第一滚轮的外壁安装有转向座,且转向座的外壁安装于扫地机器人底部的前端,转向座的输入端安装有第一减速器,第一减速器的输入端安装有驱动电机,驱动电机用于调节第一滚轮转动角度。
8、优选的,所述行走机构包括一组第二滚轮,且第二滚轮分别安装于扫地机器人底部尾端的两侧,第二滚轮的输入端安装有第二减速器,第二减速器的输入端安装有步进电机,扫地机器人底部的边缘安装有若干个感知模块,感知模块用于检测扫地机器人与地面之间的距离变化,并将获取的距离变化数据实时发送到微处理器模块。
9、优选的,所述防护机构包括防碰撞板,且防碰撞板通过螺栓安装于扫地机器人正面的两侧,防碰撞板正面的顶部和底部均嵌合安装有激光测距仪,且两个激光测距仪的位置高度分别对应扫地机器人主体高度的最高处和最低处,且激光测距仪与微处理器模块通过电性连接,激光测距仪分别用于检测扫地机器人的最高通过高度和最低通过高度。
10、优选的,所述人机交互机构包括触控显示屏、麦克风、语音识别模块、语音合成模块、扬声器和数据传输模块,触控显示屏嵌合安装于扫地机器人顶部的中部,麦克风嵌合安装于触控显示屏边框的一侧,扬声器安装于触控显示屏边框的另一侧,触控显示屏用于显示清扫区域、行走路径和电量等各类参数数据,语音识别模块用于接收麦克风采集到的声音信号,并转换为计算机能够识别的语音数据发送到微处理器模块,微处理器模块根据语音识别模块解析出的指令来控制扫地机器人的行为或通过语音合成模块将回复或提醒的文本合成为流畅的语音通过扬声器进行播放,数据传输模块用于将微处理器模块的工作数据发送给用户。
11、优选的,所述充电机构包括充电接口、充电座、电量检测模块和充电定位模块,充电接口安装于扫地机器人背面,充电接口用于与充电座的触点或线圈相对应,充电座是扫地机器人进行自动充电的固定设备,电量检测模块和充电定位模块均与微处理器模块通过电性连接,电量检测模块用于实时监测电源机构的剩余电量,并将数据发送到微处理器模块,进行充电时微处理器模块激活充电定位模块确定充电座的位置,并通过路径规划模块规划充电路径。
12、优选的,该具有路径规划功能的扫地机器人的工作步骤如下:
13、s1、通过使用slam技术、激光雷达模块和地图构建模块构建出清扫区域的地图,并通过实时区域划分模块对构建出的地图进行区域划分并规划清扫路径,清扫过程中,规划的清扫路径上存在有遮挡物时,通过相机识别模块和本地数据库对遮挡物进行分辨,判断遮挡物属于生物则提醒其离开,提醒后未离开,则对被占据区域进行标记,调整清扫路径,并在完成清扫后再对标记区域进行清理;
14、s2、通过地图优化模块和数据存储模块能够用于在环境发生变化时,实时优化更新地图数据,通过微处理器模块能够发送指令控制可编plc控制器调节扫地机器人工作;
15、s3、通过两个激光测距仪的位置和高度设置,能够快速判断出,扫地机器人的最大通过性,避免出现扫地机器人清扫时被卡住的情况;
16、s4、通过触控显示屏、语音合成模块和扬声器的设置,在遇到台阶无法通过,而造成有大面积区域无法进行清扫的情况时,微处理器模块能够生成文本通过触控显示屏进行显示或者通过扬声器或数据传输模块将数据发送给用户,提醒用户处理障碍物,通过麦克风、语音识别模块,方便用户通过语音调节扫地机器人进行工作。
17、优选的,在所述s1中还包括如下步骤:
18、s11、判断遮挡物属于非生物则对其占据的区域进行检测,并更新地图调整清扫路径;
19、在所述s4中还包括如下步骤:
20、s41、通过电量检测模块能够实时监测扫地机器人的电量,在电量不足,需要进行充电时,通过充电定位模块定位充电座的位置,再通过路径规划模块规划好充电的最近移动路径。
21、与现有技术相比,本发明的有益效果是:
22、1.本发明通过使用slam技术、激光雷达模块和地图构建模块构建出清扫区域的地图,并通过实时区域划分模块对构建出的地图进行区域划分并规划清扫路径,清扫过程中,规划的清扫路径上存在有遮挡物时,通过相机识别模块和本地数据库对遮挡物进行分辨,判断遮挡物属于生物则提醒其离开,提醒后未离开,则对被占据区域进行标记,调整清扫路径,并在完成清扫后再对标记区域进行清理,判断遮挡物属于非生物则对其占据的区域进行检测,并更新地图调整清扫路径,进而能够避免出现未清扫区域,提高整体清扫效果;
23、2.本发明通过驱动电机、第一减速器和转向座能够调节扫地机器人前轮的转向,通过步进电机和第二减速器能够调节扫地机器人的后轮转速,进而完成扫地机器人的移动,通过在扫地机器人底部的边缘安装有感知模块,用于检测扫地机器人与地面之间的距离变化,在检查到有高度距离落差较大的区域时,微处理器模块能够发出指令停止扫地机器人再向高度落差较大的区域移动,进而能够提高扫地机器人的防跌落效果,提高扫地机器人的使用寿命和清扫安全性;
24、3.本发明通过防碰撞板有利于提高扫地机器人出现碰撞情况时的防护效果,通过两个激光测距仪的位置和高度设置,能够防止扫地机器人在移动时,撞击或卡在台阶上情况,或者撞击到沙发底部的情况出现,进而通过激光测距仪能够快速判断出,扫地机器人的最大通过性,避免出现扫地机器人清扫时被卡住的情况,进而提高扫地机器人的清扫效果;
25、4.本发明通过触控显示屏、语音合成模块和扬声器的设置,在遇到台阶无法通过,而造成有大面积区域无法进行清扫的情况时,微处理器模块能够生成文本通过触控显示屏进行显示或者通过扬声器或数据传输模块将数据发送给用户,提醒用户处理障碍物,通过麦克风、语音识别模块,方便用户通过语音调节扫地机器人进行工作,进而提高扫地机器人的清理便捷性。
本文地址:https://www.jishuxx.com/zhuanli/20240615/61914.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表