分体式搬运机器人及车辆搬运系统的制作方法
- 国知局
- 2024-07-10 18:23:42
本技术涉及车辆搬运,具体涉及一种分体式搬运机器人及车辆搬运系统。
背景技术:
1、立体车库为停放车辆提供了便利的场所,具有占地面积小、储存空间大和自动化的优势,随着科技的发展,立体车库越来越普及,解决了车辆停放困难的问题。
2、立体车库主要依靠可升降运动的搬运器实现在立体车库内换层,利用水平驱动机构及车台板的配合实现将车辆转运至对应的储存位,这种完全依靠立体车库内部机械机构的转运方式虽然实现了车辆自动化入库及出库,但是由于车台板尺寸的限制,需要考虑原储存位是否存在其他车台板,在配合复杂的转运流程将原有的车台板转移,之后在对承载车辆的车台板进行转移,增加了车辆入库和出库的时间,就导致仅凭借车台板对车辆转运的效率不高。
3、为了解决上述技术问题,现有技术中采用梳齿搬运器或夹抱式搬运器来代替车台板完成车辆在同层的转运,其中,梳齿搬运器结构复杂且机体较厚,需要将取车位或者存车位设置一定高度梳齿存储位,由于夹抱式搬运器同样存在一定的宽度,所以需要设置一定的高台,因此,立体车库的储存位层高还需要考虑给梳齿搬运器或夹抱式搬运器留有额外的搬运作业高度,造成了空间上的浪费。
技术实现思路
1、因此,本实用新型要解决的技术问题在于克服现有技术中的立体车库的储存位层高还需要考虑给梳齿搬运器或夹抱式搬运器留有额外的搬运作业高度,造成了空间上的浪费的缺陷,从而提供一种分体式搬运机器人及车辆搬运系统。
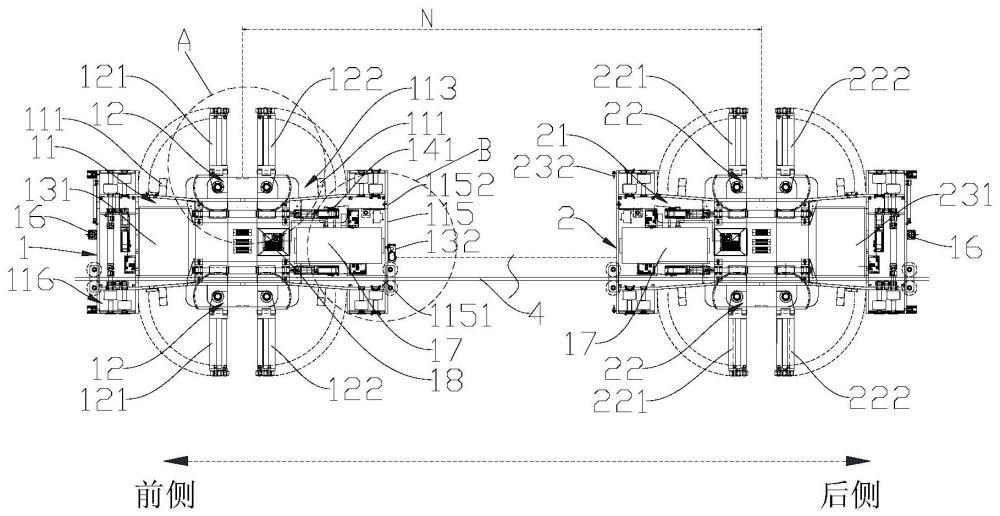
2、根据本实用新型的第一方面,提供了一种分体式搬运机器人,包括:第一搬运机器人,包括第一行走机构和第一夹臂组件,两组第一夹臂组件分别设置在所述第一行走机构的相对两侧,所述第一夹臂组件包括可转动设置的第一夹臂和第二夹臂;第二搬运机器人,包括第二行走机构和第二夹臂组件,两组第二夹臂组件分别设置在所述第二行走机构的相对两侧,所述第二夹臂包括可转动设置的第三夹臂和第四夹臂;所述第一行走机构和所述第二行走机构上分别设置有容纳所述第一夹臂组件和第二夹臂组件的收容空间。
3、可选地,所述第一夹臂组件包括驱动机构,所述第一夹臂和所述第二夹臂适于在所述驱动机构的驱动下向相互靠近的方向转动至伸出状态,以及向相互远离的方向转动至收回状态;所述第二夹臂组件与所述第一夹臂组件的结构相同。
4、可选地,所述第一夹臂设置有第一辊筒,所述第二夹臂设置有第二辊筒,在所述第一夹臂和所述第二夹臂向伸出状态转动时,所述第一辊筒和所述第二辊筒与车辆的前轮或后轮接触,运动到位后将所述前轮或后轮托举起距离支撑面一定的距离。
5、可选地,所述第一夹臂包括第一连接臂、第一摆动臂和第一滚轮,所述第一连接臂通过第一转轴连接在所述第一行走机构上,所述第一连接臂适于相对所述第一行走机构在水平方向上转动,所述第一摆动臂通过第二转轴连接在第一连接臂上,所述第一摆动臂适于相对所述第一行走机构在高度方向上摆动,所述第一滚轮转动设置在所述第一摆动臂的边缘,所述第一滚轮的转动轴线与所述第一摆动臂的延伸方向平行;
6、所述第二夹臂包括第二连接臂、第二摆动臂和第二滚轮,所述第二连接臂通过第三转轴连接在所述第一行走机构上,所述第二连接臂适于相对所述第一行走机构在水平方向上转动,所述第二摆动臂通过第四转轴连接在第二连接臂上,所述第二摆动臂适于相对所述第一行走机构在高度方向上摆动,所述第二滚轮的转动轴线与所述第二摆动臂的延伸方向平行。
7、可选地,所述第一行走机构上设置有与所述第一夹臂和所述第二夹臂对应的导向支架,所述导向支架具有斜面,所述斜面用于对所述第一夹臂和所述第二夹臂支撑。
8、可选地,所述驱动机构包括:
9、驱动件,设置在所述第一行走机构上;
10、行星减速器,与所述驱动件传动连接;
11、驱动轴,与所述行星减速器传动连接,包括第一蜗杆和第二蜗杆,所述第一夹臂和第二夹臂分别设置有与所述第一蜗杆配合的第一啮齿部和与所述第二蜗杆配合的第二啮齿部。
12、可选地,所述第一行走机构包括:
13、机架,所述机架的侧部设置有容纳所述第一夹臂组件的收容空间;
14、行驶轮组,两组所述行驶轮组分别位于所述机架的前侧和后侧;
15、所述第一行走机构和所述第二行走机构结构相同。
16、可选地,所述机架的底部设置有沿行进方向延伸的第一导向槽和第二导向槽,所述第一导向槽和第二导向槽分别位于所述机架底部的两侧,所述第一导向槽和所述第二导向槽用于与导轨导向配合;所述机架的内部具有装配空间,所述装配空间位于所述第一导向槽和所述第二导向槽之间。
17、可选地,所述第一导向槽和/或所述第二导向槽的槽口设置有导向轮。
18、可选地,所述收容空间的前侧和后侧分别设置有行驶轮安装部,所述行驶轮安装部设置有所述行驶轮组。
19、可选地,所述第一行走机构的前侧和所述第二行走机构的后侧分别设置有激光扫描仪,所述激光扫描仪用于对所述行进路线上的障碍物进行检测。
20、可选地,所述第一搬运机器人和所述第二搬运机器人分别通过锂电池供电。
21、根据本实用新型的第二方面,提供了一种车辆搬运系统,包括上述的分体式搬运机器人,还包括:横移台车,所述横移台车用于承载所述分体式搬运机器人,并带动所述分体式搬运机器人移动或旋转。
22、可选地,所述横移台车上设置有与无线充电发射模组,所述无线充电发射模组用于向所述第一搬运机器人和/或所述第二搬运机器人充电。
23、可选地,所述车辆搬运系统的进出口支撑面上具有平行设置的第一导轨和第二导轨,所述横移台车上设置有第三导轨,所述分体式搬运机器人入库时,所述横移台车旋转并运动至所述第三导轨与所述第一导轨对接,所述分体式搬运机器人在第一导轨和第三导轨的导向下运动至所述横移台车上;所述分体式搬运机器人出库时,所述横移台车旋转并运动至所述第三导轨与所述第二导轨对接,所述分体式搬运机器人在所述第三导轨和所述第二导轨的导向下运动。
24、本实用新型具有以下优点:
25、本实用新型提供的分体式搬运机器人,包括第一搬运机器人和第二搬运机器人。包括第一行走机构和第一夹臂组件,两组第一夹臂组件分别设置在第一行走机构的相对两侧,第一夹臂组件包括可转动设置的第一夹臂和第二夹臂;第二搬运机器人,包括第二行走机构和第二夹臂组件,两组第二夹臂组件分别设置在第二行走机构的相对两侧,第二夹臂包括可转动设置的第三夹臂和第四夹臂;第一行走机构和第二行走机构上分别设置有容纳第一夹臂组件和第二夹臂组件的收容空间。
26、第一搬运机器人可以通过第一夹臂和第二夹臂对车辆的前轮进行托举,第二搬运机器人可以通过第三夹臂和第四夹臂对车辆的后轮进行托举。在进行托举动作之间,第一夹臂组件和第二夹臂组件可以位于对应的收容空间内,这样第一夹臂组件和第二夹臂组件就不会对第一搬运机器人和第二搬运机器人的宽度尺寸造成影响,使得第一行走机构和第二行走机构的宽度为第一搬运机器人和第二搬运机器人的最大宽度,这样第一搬运机器人和第二搬运机器人就可以顺利地进入停放在地面上的车辆底部,无需设置高台,立体车库的层高可以完全根据车辆高度而定,能够节省立体车库的空间,实现密集储存。
本文地址:https://www.jishuxx.com/zhuanli/20240615/68095.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。