智能高空作业防腐喷涂机器人的制作方法
- 国知局
- 2024-07-10 18:28:26
本发明主要涉及喷涂机器人,具体涉及一种智能高空作业防腐喷涂机器人。
背景技术:
1、近年来,随着科技不断的进步,机器人应用的领域也越来越广,为了满足人们对美好生活的向往和对环境美化的需求越来越强,高层建筑外表面以及大型火电厂的圆形穹顶煤棚等需要做防腐美化处理,通常采用表面涂油漆方法进行美化和防腐处理;这样就需要高空作业人员进行喷涂处理,在高空作业领域,屋顶喷漆工作是一种危险且具有挑战性的任务。尤其是这种大型电厂煤棚穹顶,高度高,面积大、并且带有球面弧形表面作业,如果人工处理,存在诸多问题与挑战。首先,高空喷漆工作对工人而言存在极高的风险,包括意外坠落和身体健康受损的风险。其次,由于高空作业的复杂性和高劳动强度,人工处理往往需要大量的人力和时间,效率较低。此外,人工处理还可能受到环境条件(如风力、温度等)的限制,导致作业质量和稳定性并不可控。
2、近年,国内外将机器人技术引入到行业内来解决相关问题。尽管机器人可以提供更高的安全性和稳定性,具有相当多的优点。但在实际应用中仍存在一些挑战,仍无法完全解决问题。例如,喷漆过程中的喷涂精度和涂层均匀性也是机器人处理的挑战之一。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种喷涂效率高、喷涂效果好的智能高空作业防腐喷涂机器人。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种智能高空作业防腐喷涂机器人,包括机器人本体和喷涂组件,所述机器人本体包括机架、履带和永磁铁;
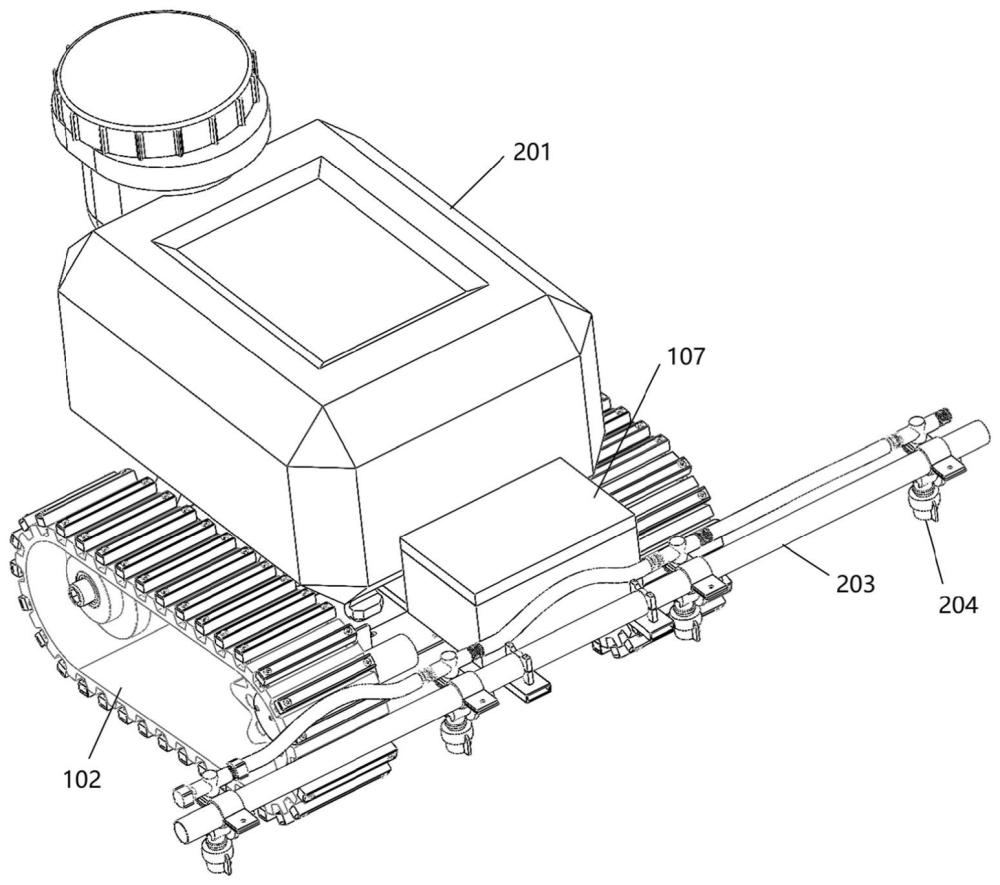
4、所述喷涂组件包括涂料箱、喷涂泵、安装杆和多个喷头;所述涂料箱和喷涂泵均位于所述机器人本体上,所述安装杆安装于所述机架的前方或后方,多个喷头间隔布置在所述安装杆上且通过管路与所述喷涂泵连通;
5、所述履带安装于机架两侧的轮子上,所述履带上间隔安装有多条永磁铁,各所述永磁铁与履带之间设有弹性件。
6、作为上述技术方案的进一步改进:
7、所述永磁铁安装于一橡胶座的安装槽内,所述安装槽的深度大于所述永磁铁的厚度。
8、所述永磁铁和橡胶座上均设有安装孔,所述安装孔内设有固定螺钉;所述固定螺钉依次穿过永磁铁、橡胶座和弹性件后与履带连接。
9、各所述喷头上均设置有喇叭形防风罩。
10、所述喷涂泵与机器人本体的电池电连接。
11、所述履带为橡胶履带。
12、所述涂料箱内设有液位传感器。
13、所述机器人本体上设有视觉相机。
14、所述视觉相机安装于机器人本体的前方或/和后方。
15、所述弹性件为压缩弹簧。
16、与现有技术相比,本发明的优点在于:
17、本发明采用机器人可以避免人员登高搭架等传统繁琐的工艺流程,利用永磁爬壁喷涂机器人在钢体结构或铁质表面行走并进行喷涂作业,不仅大大提高了效率,更关键的保证了人身和建筑本身的安全;本发明从工作场景入手,对机器人机械结构进行优化和设计,解决当下机器人处理问题方式的局限性,从而提升高空喷漆工作的安全性和效率,提高生产力,助力推动行业高质量发展,适应各种钢结构、电厂大型煤棚等铁质表面的建筑喷漆。
技术特征:1.一种智能高空作业防腐喷涂机器人,其特征在于,包括机器人本体(1)和喷涂组件(2),所述机器人本体(1)包括机架(101)、履带(102)和永磁铁(103);
2.根据权利要求1所述的智能高空作业防腐喷涂机器人,其特征在于,所述永磁铁(103)安装于一橡胶座(1031)的安装槽(1032)内,所述安装槽(1032)的深度大于所述永磁铁(103)的厚度。
3.根据权利要求2所述的智能高空作业防腐喷涂机器人,其特征在于,所述永磁铁(103)和橡胶座(1031)上均设有安装孔,所述安装孔内设有固定螺钉(1033);所述固定螺钉(1033)依次穿过永磁铁(103)、橡胶座(1031)和弹性件(104)后与履带(102)连接。
4.根据权利要求1或2或3所述的智能高空作业防腐喷涂机器人,其特征在于,各所述喷头(204)上均设置有喇叭形防风罩(205)。
5.根据权利要求1或2或3所述的智能高空作业防腐喷涂机器人,其特征在于,所述喷涂泵(202)与机器人本体(1)的电池(107)电连接。
6.根据权利要求1或2或3所述的智能高空作业防腐喷涂机器人,其特征在于,所述履带(102)为橡胶履带。
7.根据权利要求1或2或3所述的智能高空作业防腐喷涂机器人,其特征在于,所述涂料箱(201)内设有液位传感器。
8.根据权利要求1或2或3所述的智能高空作业防腐喷涂机器人,其特征在于,所述机器人本体(1)上设有视觉相机(108)。
9.根据权利要求8所述的智能高空作业防腐喷涂机器人,其特征在于,所述视觉相机(108)安装于机器人本体(1)的前方或/和后方。
10.根据权利要求1或2或3所述的智能高空作业防腐喷涂机器人,其特征在于,所述弹性件(104)为压缩弹簧。
技术总结本发明公开了一种智能高空作业防腐喷涂机器人,包括机器人本体和喷涂组件,所述机器人本体包括机架、履带和永磁铁;所述喷涂组件包括涂料箱、喷涂泵、安装杆和多个喷头;所述涂料箱和喷涂泵均位于所述机器人本体上,所述安装杆安装于所述机器人本体的前方或后方,多个喷头间隔布置在所述安装杆上且通过管路与所述喷涂泵连通;所述履带安装于机架两侧的轮子上,所述履带上间隔安装有多条永磁铁,各所述永磁铁与履带之间设有弹性件。本发明具有喷涂效率高、喷涂效果好等优点。技术研发人员:何骞,费章胜,刘慧瑾受保护的技术使用者:上海上电漕泾发电有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240615/68685.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表