一种基于启发式算法的胶合板自动化修补方法与流程
- 国知局
- 2024-07-11 15:49:17
本发明涉及胶合板缺陷修补,尤其涉及一种基于启发式算法的胶合板自动化修补方法。
背景技术:
1、胶合板是木材工业中消耗量最大的板种。其生产属于木材深加工,经由旋切机旋切成单板,然后通过纵横叠放进行粘合、拼接、涂胶、组坯、热压、补胶、裁边和砂光等一系列复杂工艺制造而成的人造板种。在其制造过程中,因板材存在裂缝、漏洞等缺陷,并且在拼接工艺时易产生裂隙或孔洞。这些裂隙、孔洞可用腻子填补,以提高木板的使用性能和防水性能。
2、通常使用腻子填补胶合板缺陷这一过程由人工进行。工人使用刮刀,将腻子通过按压等方法填入缺陷,但是人工作业效率较低,并且刮刀填涂通常会消耗过多原料,造成极大的额外损耗。
3、而国内外有关自动化修补胶合板缺陷的研究较少,仅有的自动化喷涂腻子修补设备通常依靠大口径泵,通过高压将腻子压入缺陷中进行缺陷填补,这种方法通常只能处理木板两侧的缺陷,并且填补的缺陷需要人工控制。且该方法损耗极多,造成巨大浪费。
4、因此,亟需一种新的技术方案来解决上述存在的技术问题。
技术实现思路
1、本发明的目的在于克服上述现有技术的问题,提供了一种基于启发式算法的胶合板自动化修补方法,用于解决胶合板缺陷的自动化修补,降低人力、材料损耗以及节省时间的技术问题。
2、上述目的是通过以下技术方案来实现:
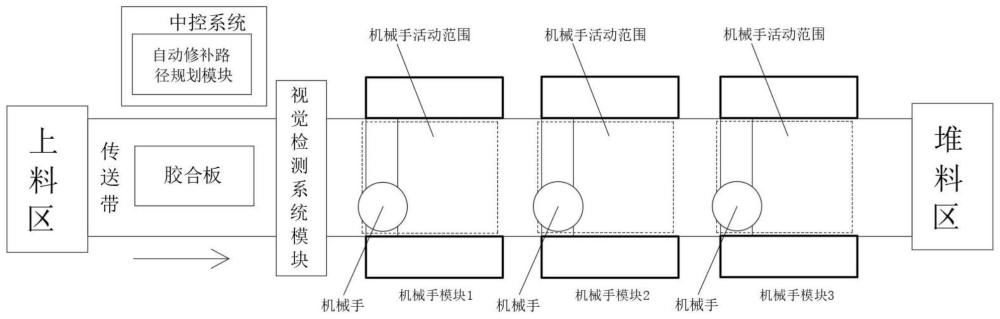
3、一种基于启发式算法的胶合板自动化修补方法,包括用于传送胶合板的传送带,沿所述传送带的前后端分别设置有上料区和堆料区,沿所述传送带的进料方向依次设置有视觉检测系统模块和至少一个机械手模块,所述传送带、所述视觉检测系统模块和所述机械手模块分别与中控系统连接并受其控制,所述中控系统内设置有自动修补路径规划模块;步骤如下:
4、步骤(1)所述胶合板从所述上料区进入所述传送带,待所述胶合板传送至所述视觉检测系统模块的检测区域时,通过所述视觉检测系统模块对移动状态下的所述胶合板进行图像采集,并采用视觉图像算法识别所述胶合板上的缺陷数量、缺陷坐标和缺陷尺寸,生成缺陷数据传送至自动修补路径规划模块;
5、步骤(2)所述自动修补路径规划模块接收所述缺陷数据,根据缺陷外形对其进行分类,包括点类型、线类型和矩形类型,以及计算出因所述传送带的移动造成的偏差值;并采用基于启发式算法的自动路径规划算法,算出所述胶合板经过各机械手模块时,各所述机械手模块中对应的机械手的缺陷修补路径,以便所述中控系统对各机械手的路径规划控制;
6、步骤(3)待所述胶合板传送至所述机械手模块所对应的工作区域时,所述机械手根据所述中控系统分配的缺陷修补路径对移动状态下的所述胶合板进行缺陷修补操作;
7、步骤(4)待所述胶合板修补完成后,直接被传送至所述堆料区堆积,完成下料。
8、进一步地,所述步骤(2)具体包括:
9、步骤(2-1)所述自动修补路径规划模块接收所述缺陷数据计算修补单个缺陷所需要的修补时间,并确定需要参与缺陷修补的所述机械手模块的数量;
10、步骤(2-2)采用基于启发式算法的自动路径规划算法对单张所述胶合板上的所述缺陷数据进行路径规划,并计算出单张胶合板上所有的缺陷所需要的修补时间;
11、步骤(2-3)所述中控系统将步骤(2-2)中所述路径规划的信息发送至指定的所述机械手模块,所述机械手模块中的所述机械手根据接收的所述路径规划的信息进行修补工作;
12、步骤(2-4)所述中控系统对步骤(2-2)中所述路径规划的信息进行存储,以单张所述胶合板为一个保存单元。
13、进一步地,步骤(2-2)中所述采用基于启发式算法的自动路径规划算法对单张所述胶合板上的所述缺陷数据进行路径规划,具体为:以可修复的缺陷数为目标函数,进行非线性约束;所述约束包括:
14、约束1、路径坐标约束,x轴对应胶合板的长度,y轴对应胶合板的宽度;
15、约束2、时间约束,机械手修补到当前坐标点时间;
16、约束3、机械手性能约束,机械手速度<1600单位mm/s;
17、约束4、机械约束,机械手转弯速度根据转弯角度和转弯圆弧段的长度决定,是一个小于1600的数值。
18、进一步地,所述机械手修补到当前坐标点时间包括待修补缺陷点可修补的时间范围的下界,以及待修补缺陷点可修补的时间范围的上界。
19、进一步地,步骤(2-3)中所述机械手在每张胶合板的修补过程中,每个缺陷修补结束后,z轴不需要抬起。
20、进一步地,步骤(2-3)中所述机械手在每张胶合板的所有缺陷修补结束后,z轴需要抬起,并切换到下一张胶合板修补。
21、进一步地,步骤(2-3)中机械手在每张胶合板修补结束后,以结束点为基准点规划下一张胶合板的修补路径,不需要以原点为基准点规划。
22、进一步地,所述机械手模块有1个,包括机械手模块1、机械手模块2和机械手模块3,且分别受所述中控系统控制。
23、有益效果
24、本发明所提供的一种基于启发式算法的胶合板自动化修补方法,并对应的设计了一套智能化系统,通过操控机械手进行胶合板自动修补,以降低人力消耗,节省时间开销,以及降低材料损耗。同时采用本方法可实现大规模胶合板移动状态下的快速自动化填补缺陷,能填补缺陷覆盖了几乎所有可能出现在胶合板上的缺陷类型,最终实现胶合板的缺陷自动化修复,以提高木板使用性能,此外还可极大节省人力、时间、原料等资源。
技术特征:1.一种基于启发式算法的胶合板自动化修补方法,其特征在于,包括用于传送胶合板的传送带,沿所述传送带的前后端分别设置有上料区和堆料区,沿所述传送带的进料方向依次设置有视觉检测系统模块和至少一个机械手模块,所述传送带、所述视觉检测系统模块和所述机械手模块分别与中控系统连接并受其控制,所述中控系统内设置有自动修补路径规划模块;步骤如下:
2.根据权利要求1所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,所述步骤(2)具体包括:
3.根据权利要求2所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,步骤(2-2)中所述采用基于启发式算法的自动路径规划算法对单张所述胶合板上的所述缺陷数据进行路径规划,具体为:以可修复的缺陷数为目标函数,进行非线性约束;所述约束包括:
4.根据权利要求3所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,所述机械手修补到当前坐标点时间包括待修补缺陷点可修补的时间范围的下界,以及待修补缺陷点可修补的时间范围的上界。
5.根据权利要求2所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,步骤(2-3)中所述机械手在每张胶合板的修补过程中,每个缺陷修补结束后,z轴不需要抬起。
6.根据权利要求2所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,步骤(2-3)中所述机械手在每张胶合板的所有缺陷修补结束后,z轴需要抬起,并切换到下一张胶合板修补。
7.根据权利要求2所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,步骤(2-3)中机械手在每张胶合板修补结束后,以结束点为基准点规划下一张胶合板的修补路径,不需要以原点为基准点规划。
8.根据权利要求1所述的一种基于启发式算法的胶合板自动化修补方法,其特征在于,所述机械手模块有1个,包括机械手模块1、机械手模块2和机械手模块3,且分别受所述中控系统控制。
技术总结本发明涉及胶合板缺陷修补技术领域,具体是一种基于启发式算法的胶合板自动化修补方法,包括用于传送胶合板的传送带,沿所述传送带的前后端分别设置有上料区和堆料区,沿所述传送带的进料方向依次设置有视觉检测系统模块和至少一个机械手模块,所述传送带、所述视觉检测系统模块和所述机械手模块分别与中控系统连接并受其控制,所述中控系统内设置有自动修补路径规划模块。本方案提供的缺陷修补方法可实现大规模胶合板移动状态下的快速自动化填补缺陷,能填补缺陷覆盖了几乎所有可能出现在胶合板上的缺陷类型,最终实现胶合板的缺陷自动化修复,以提高木板使用性能,此外还可极大节省人力、时间、原料等资源。技术研发人员:张凡,蒋培如,陈利敏,魏旭东,姬晓栋,吴然受保护的技术使用者:无锡信捷电气股份有限公司技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240615/76141.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表