一种竞赛捡球机器人的制作方法
- 国知局
- 2024-07-11 16:08:27
本技术涉及捡球机器人,具体涉及一种竞赛捡球机器人。
背景技术:
1、在乒乓球运动员、网球运动员的日常训练中,场地中会落下大量的散球,影响运动员的走位和训练安全。因此需要专门的工作人员负责回收散球,并且为了避免影响运动员的正常训练,工作人员需要快速进出场地,十分耗费人力。
技术实现思路
1、本实用新型提出了一种竞赛捡球机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
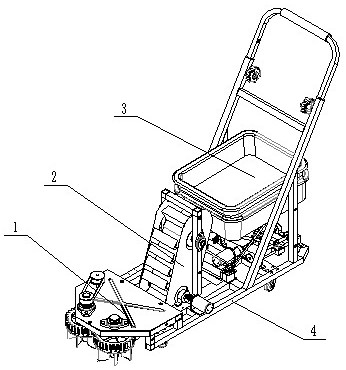
3、一种竞赛捡球机器人,包括拾取模块、传送模块、收集模块、支撑架,所述支撑架前端固定拾取模块,所述支撑架上端面位于拾取模块后侧固定有传送模块,所述支撑架上端面位于传送模块后侧固定收集模块,所述拾取模块包括支撑钢板,所述支撑钢板上端面分别固定轴承座一、轴承座二,所述穿过轴承座一设置有轴一,所述轴一顶部固定同步带轮二,所述轴一底部固定上轮一,所述上轮一与支撑钢板底部端面之间固定齿轮一,所述齿轮一固定在轴一上,穿过所述轴承座二设置有轴二,所述轴二底部固定上轮二,所述上轮二与支撑钢板底部端面之间设置有齿轮二,所述齿轮二固定在轴二上,穿过所述支撑钢板固定有电机一,所述电机一的动力输出轴固定同步带轮一,所述同步带轮一与同步带轮二通过同步带连接,所述支撑钢板底部端面沿支撑钢板的轮廓固定有多跟矩管,所述矩管位于支撑架的两侧端面底部分别固定有多跟连接矩管,所述连接矩管底部固定在支撑架上。
4、进一步的,所述传送模块包括矩管架,所述矩管架固定在支撑架上端面,所述支撑架内侧端面位于矩管架内侧分别固定有挡板一、挡板二,所述矩管架两侧外端面分别固定轴承座三、轴承座四,穿过所述轴承座三、轴承座四设置有轴三,所述轴三上设置有大同步带轮一,所述支撑架上端面靠近挡板二的位子固定有电机二,所述支撑架上端面靠近挡板一、挡板二的位置分别固定轴承座五、轴承座六,穿过所述轴承座五、轴承座六设置有轴四,所述轴四上设置有大同步带轮二,所述轴四与电机二之间通过联轴器连接,所述大同步带轮一与大同步带轮二通过大同步带连接,所述支撑架内部相对的两侧面固定有铰龙前段。
5、进一步的,所述收集模块包括垫高块一,所述垫高块一固定在支撑架的上端面,所述垫高块一上端面固定杆铰连接板一,所述垫高块一一侧与垫高块一平行设置有垫高块二,所述垫高块二固定在支撑架上端面,所述垫高块二上端面固定杆铰连接板二,所述垫高块一与垫高块二之间设置有电机座,所述电机座固定在支撑架上端面,所述电机座上固定电机三,所述电机三的动力输出轴上固定有联轴器二,所述联轴器二的另一侧固定有丝杠座一,所述丝杠座一固定在支撑架上端面,与所述丝杠座一相对面固定有丝杠座二,所述丝杠二固定在支撑架上端面,所述联轴器二另一端连接丝杠,所述丝杠穿过丝杠座一活动固定在丝杠座二内部,所述丝杠上设置有滑块一,所述滑块一上端面固定杆铰连接板四,所述丝杠座一一侧设置有导轨支撑一,所述导轨支撑一固定在支撑架上端面,所述导轨支撑一对立方向设置有导轨支撑二,所述导轨支撑二固定在支撑架上端面,穿过所述导轨支撑一、导轨支撑二设置有滑杆一,所述丝杠座一的另一端设置设置有导轨支撑三,所述导轨支撑三固定在支撑架上端面,所述导轨支撑三相对位置设置有导轨支撑四,所述导轨支撑四固定在支撑架的上端面,穿过所述导轨支撑三、导轨支撑四设置有滑杆二,所述滑杆二上设置有滑块三,所述滑块三上端面固定杆铰连接板五,所述滑杆一上设置有滑块二,所述滑块二上端面固定杆铰连接板三,所述杆铰连接板一端面处设置有支撑板一,所述杆铰连接板二端面处设置有支撑板三,穿过所述支撑板一、支撑板三设置有杆,所述杆铰连接板三端面处设置有支撑板二,所述杆铰连接板五端面处设置有支撑板四,穿过所述支撑板二、支撑板四设置有杆,穿过所述支撑杆板一、支撑板二、支撑板三、支撑板四设置有中心杆,所述电机三顶部架设有固定接料盆,所述固定接料盆内部活动放置有可拆接料盆。
6、进一步的,所述固定接料盆底部端面分别设置有滑轨一、滑轨二,所述滑轨一内部活动固定有滑块支架一,所述滑轨二内部活动固定滑块支架二,所述滑块支架一端面设置有支撑板一,所述滑块支架二端面设置有支撑板三,穿过所述支撑板一、滑块支架一、滑块支架二、支撑板三设置有杆,所述固定接料盆底部端面位于滑轨一底部设置有杆铰连接板六,所述杆铰连接板六端面设置有支撑板二,所述固定接料盆底部端面位于滑轨二底部固定杆铰连接板七,所述杆铰连接板七端面设置有支撑板四,穿过所述支撑板二、杆铰连接板六、杆铰连接板、支撑板七设置有杆。
7、有益之处:
8、1、本实用新型专利采用电机一控制同带轮一,同步带轮一在同步带的作用下控制同步带轮二转动,同步带轮二转动带动轴一上的齿轮一转动,齿轮一啮合齿轮二,齿轮二带动轴二运转,轴一、轴二同时运转通过各自底部固定的上轮一、上轮二将散落的球向装置内部的铰龙前段移动,其结构简单,易于维护实现了自动捡球的功能,节约了人力。
9、2、本实用新型专利采用电机二控制大同步带轮二运转,大同步带轮二在大同步带的作用下带动大同步带轮一运行,本实用新型同步大同步带将铰龙前段所收集的球运出至收集模块内,实现了自动化的运输与收集。
技术特征:1.一种竞赛捡球机器人,其特征在于:包括拾取模块(1)、传送模块(2)、收集模块(3)、支撑架(4),所述支撑架(4)前端固定拾取模块(1),所述支撑架(4)上端面位于拾取模块(1)后侧固定有传送模块(2),所述支撑架(4)上端面位于传送模块(2)后侧固定收集模块(3),所述拾取模块(1)包括支撑钢板(101),所述支撑钢板(101)上端面分别固定轴承座一(102)、轴承座二(103),穿过所述轴承座一(102)设置有轴一(107),所述轴一(107)顶部固定同步带轮二(106),所述轴一(107)底部固定上轮一(108),所述上轮一(108)与支撑钢板(101)底部端面之间固定齿轮一(110),所述齿轮一(110)固定在轴一(107)上,穿过所述轴承座二(103)设置有轴二(112),所述轴二(112)底部固定上轮二(109),所述上轮二(109)与支撑钢板(101)底部端面之间设置有齿轮二(111),所述齿轮二(111)固定在轴二(112)上,穿过所述支撑钢板(101)固定有电机一(105),所述电机一(105)的动力输出轴固定同步带轮一(104),所述同步带轮一(104)与同步带轮二(106)通过同步带(113)连接,所述支撑钢板(101)底部端面沿支撑钢板(101)的轮廓固定有多跟矩管(114),所述矩管(114)位于支撑架(4)的两侧端面底部分别固定有多根连接矩管(115),所述连接矩管(115)底部固定在支撑架(4)上。
2.根据权利要求1所述的一种竞赛捡球机器人,其特征在于:所述传送模块(2)包括矩管架(214),所述矩管架(214)固定在支撑架(4)上端面,所述支撑架(4)内侧端面位于矩管架(214)内侧分别固定有挡板一(202)、挡板二(203),所述矩管架(214)两侧外端面分别固定轴承座三(206)、轴承座四(207),穿过所述轴承座三(206)、轴承座四(207)设置有轴三(208),所述轴三(208)上设置有大同步带轮一(204),所述支撑架(4)上端面靠近挡板二(203)的位子固定有电机二(210),所述支撑架(4)上端面靠近挡板一(202)、挡板二(203)的位置分别固定轴承座五(211)、轴承座六(212),穿过所述轴承座五(211)、轴承座六(212)设置有轴四(213),所述轴四(213)上设置有大同步带轮二(205),所述轴四(213)与电机二(210)之间通过联轴器(209)连接,所述大同步带轮一(204)与大同步带轮二(205)通过大同步带(201)连接,所述支撑架(4)内部相对的两侧面固定有铰龙前段(215)。
3.根据权利要求1所述的一种竞赛捡球机器人,其特征在于:所述收集模块(3)包括垫高块一(301),所述垫高块一(301)固定在支撑架(4)的上端面,所述垫高块一(301)上端面固定杆铰连接板一(303),所述垫高块一(301)一侧与垫高块一(301)平行设置有垫高块二(302),所述垫高块二(302)固定在支撑架(4)上端面,所述垫高块二(302)上端面固定杆铰连接板二(304),所述垫高块一(301)与垫高块二(302)之间设置有电机座(312),所述电机座(312)固定在支撑架(4)上端面,所述电机座(312)上固定电机三(313),所述电机三(313)的动力输出轴上固定有联轴器二(314),所述联轴器二(314)的另一侧固定有丝杠座一(315),所述丝杠座一(315)固定在支撑架(4)上端面,与所述丝杠座一(315)相对面固定有丝杠座二(316),所述丝杠座二(316)固定在支撑架(4)上端面,所述联轴器二(314)另一端连接丝杠(317),所述丝杠(317)穿过丝杠座一(315)活动固定在丝杠座二(316)内部,所述丝杠(317)上设置有滑块一(318),所述滑块一(318)上端面固定杆铰连接板四(306),所述丝杠座一(315)一侧设置有导轨支撑一(308),所述导轨支撑一(308)固定在支撑架(4)上端面,所述导轨支撑一(308)对立方向设置有导轨支撑二(309),所述导轨支撑二(309)固定在支撑架(4)上端面,穿过所述导轨支撑一(308)、导轨支撑二(309)设置有滑杆一(323),所述丝杠座一(315)的另一端设置有导轨支撑三(310),所述导轨支撑三(310)固定在支撑架(4)上端面,所述导轨支撑三(310)相对位置设置有导轨支撑四(311),所述导轨支撑四(311)固定在支撑架(4)的上端面,穿过所述导轨支撑三(310)、导轨支撑四(311)设置有滑杆二(324),所述滑杆二(324)上设置有滑块三(320),所述滑块三(320)上端面固定杆铰连接板五(307),所述滑杆一(323)上设置有滑块二(319),所述滑块二(319)上端面固定杆铰连接板三(305),所述杆铰连接板一(303)端面处设置有支撑板一(325),所述杆铰连接板二(304)端面处设置有支撑板三(327),穿过所述支撑板一(325)、支撑板三(327)设置有杆(329),所述杆铰连接板三(305)端面处设置有支撑板二(326),所述杆铰连接板五(307)端面处设置有支撑板四(328),穿过所述支撑板二(326)、支撑板四(328)设置有杆(329),穿过所述支撑板一(325)、支撑板二(326)、支撑板三(327)、支撑板四(328)设置有中心杆(330),所述电机三(313)顶部架设有固定接料盆(321),所述固定接料盆(321)内部活动放置有可拆接料盆(322)。
4.根据权利要求3所述的一种竞赛捡球机器人,其特征在于:所述固定接料盆(321)底部端面分别设置有滑轨一(331)、滑轨二(332),所述滑轨一(331)内部活动固定有滑块支架一(333),所述滑轨二(332)内部活动固定滑块支架二(334),所述滑块支架一(333)端面设置有支撑板一(325),所述滑块支架二(334)端面设置有支撑板三(327),穿过所述支撑板一(325)、滑块支架一(333)、滑块支架二(334)、支撑板三(327)设置有杆(329),所述固定接料盆(321)底部端面位于滑轨一(331)底部设置有杆铰连接板六(335),所述杆铰连接板六(335)端面设置有支撑板二(326),所述固定接料盆(321)底部端面位于滑轨二(332)底部固定杆铰连接板七(336),所述杆铰连接板七(336)端面设置有支撑板四(328),穿过所述支撑板二(326)、杆铰连接板六(335)、杆铰连接板七(336)、支撑板四(328)设置有杆(329)。
技术总结本技术专利涉及捡球机器人技术领域,具体涉及一种竞赛捡球机器人,包括包括拾取模块、传送模块、收集模块、支撑架,所述支撑架前端固定拾取模块,所述支撑架上端面位于拾取模块后侧固定有传送模块,所述支撑架上端面位于传送模块后侧固定收集模块,本技术专利结构简单、动作灵活,免除了人工回收散球的过程实现了一种自动化的散球回收过程,有效节约人力。技术研发人员:张志浩受保护的技术使用者:山东利享惠众信息科技有限公司技术研发日:20230612技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240615/77694.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表