一种失衡控制能力训练装置
- 国知局
- 2024-07-11 16:17:21
本技术涉及人体工程,尤其涉及一种失衡控制能力训练装置。
背景技术:
1、平衡控制是一种复杂的运动,人的行走和站立、以及各种动作都依赖于正确的平衡能力才能顺利完成。人体姿势平衡依赖于中枢系统对视觉、本体感觉和前庭觉信息的协调以及对运动效应器的控制,几者缺一不可,相辅相成。对于儿童或老年人,由于神经系统和运动系统发育的有限性或机能的衰退,平衡能力相对较弱,而长期运动和生活习惯以及机体局部机能的减弱,也会对平衡能力产生影响。
2、发明专利申请公布号cn113729629a公开了“一种平衡能力测试系统及其应用”,属于人体工程技术领域。所述平衡能力测试系统包括:基座、俯仰运动箱和脚踏板;在所述基座的中部开有从上至下贯通的安装孔,所述俯仰运动箱设置在该安装孔内;所述俯仰运动箱能够进行俯仰运动;所述脚踏板设置在俯仰运动箱的上方,脚踏板能够进行前后运动。利用本发明系统能够进行静态测试、绕踝关节的俯仰运动、前后运动,能够采集人体作用在脚踏板上的压力变化,并能够测量出人体作用在脚踏板上的剪切力。利用本发明既可测试出人体平衡能力,还能够在该环境下进行训练进而提高人体的平衡能力。但是脚踏板的运动方式变化较少,难以对不同情况下的人体平衡能力,因此针对上述现象,迫切需要设计和生产一种失衡控制能力训练装置,以满足实际使用的需要。
技术实现思路
1、本实用新型提供一种失衡控制能力训练装置,解决了背景技术中的技术问题。
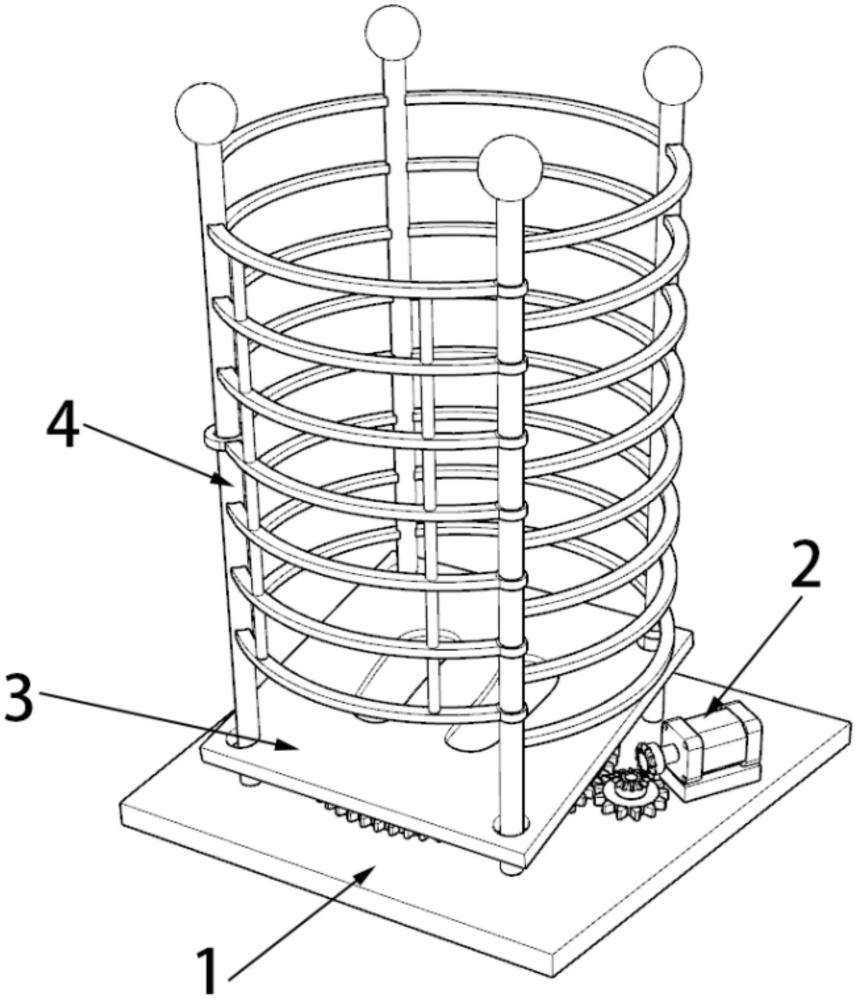
2、为解决上述技术问题,本实用新型提供的一种失衡控制能力训练装置,包括底座,所述底座的顶部设有驱动组件,所述驱动组件驱动脚踏板活动,所述脚踏板的表面设有脚踏防滑槽,所述底座的顶部固定安装有防护组件。
3、优选的,所述驱动组件包括大转盘和驱动电机,所述大转盘转动安装在底座的顶部,所述驱动电机的输出端固定套装有第一伞齿,所述第一伞齿通过齿轮啮合传动安装有第二伞齿,所述第二伞齿的底部同轴固定安装有主动齿轮,所述主动齿轮转动安装在底座的顶部,所述大转盘的边缘一体形成有与主动齿轮相啮合的齿牙,所述大转盘的顶面圆心固定安装有球形支撑座,所述驱动组件的顶面边缘位置固定安装有第一立柱,所述第一立柱的顶部固定安装有滑动球。
4、优选的,所述第一立柱的数量为四个,四个所述第一立柱通过球形支撑座极轴分布在大转盘的顶面,四个所述第一立柱的长度不一,且保证四个滑动球保持在同一平面内。
5、优选的,所述脚踏板的四角均开设有圆槽,所述脚踏板的底面固定安装有轨道,所述轨道的下方开设有环槽,所述脚踏板的地面中心固定安装有万向安装座。
6、优选的,所述万向安装座活动套接在球形支撑座的顶面,所述滑动球活动安装在环槽的内部。
7、优选的,所述防护组件包括防护栏,所述防护栏包括四个第二立柱和开关门,所述第二立柱固定安装在底座的顶部,所述第二立柱活动套接在圆槽中,所述第二立柱的顶部固定安装有手握球。
8、与相关技术相比较,本实用新型提供的一种失衡控制能力训练装置具有如下有益效果:
9、本实用新型提供失衡控制能力训练装置,通过驱动组件经过一系列的传动带动不同长度的立柱进行转动,从而改变脚踏板的倾斜方向,以创造出失衡条件,用于训练人们的平衡性。
10、本实用新型提供失衡控制能力训练装置,可以在手握球上增加触摸传感器,根据触摸时间来判断训练人员需要扶持的时间,用于对训练人员的平衡性进行评价,用于测试人们的平衡性。
技术特征:1.一种失衡控制能力训练装置,包括底座(1),其特征在于:所述底座(1)的顶部设有驱动组件(2),所述驱动组件(2)驱动脚踏板(3)活动,所述脚踏板(3)的表面设有脚踏防滑槽,所述底座(1)的顶部固定安装有防护组件(4);
2.根据权利要求1所述的一种失衡控制能力训练装置,其特征在于,所述第一立柱(27)的数量为四个,四个所述第一立柱(27)通过球形支撑座(26)极轴分布在大转盘(21)的顶面,四个所述第一立柱(27)的长度不一,且保证四个滑动球(28)保持在同一平面内。
3.根据权利要求2所述的一种失衡控制能力训练装置,其特征在于,所述脚踏板(3)的四角均开设有圆槽(31),所述脚踏板(3)的底面固定安装有轨道(32),所述轨道(32)的下方开设有环槽(33),所述脚踏板(3)的地面中心固定安装有万向安装座(34)。
4.根据权利要求3所述的一种失衡控制能力训练装置,其特征在于,所述万向安装座(34)活动套接在球形支撑座(26)的顶面,所述滑动球(28)活动安装在环槽(33)的内部。
5.根据权利要求4所述的一种失衡控制能力训练装置,其特征在于,所述防护组件(4)包括防护栏,所述防护栏包括四个第二立柱(41)和开关门(42),所述第二立柱(41)固定安装在底座(1)的顶部,所述第二立柱(41)活动套接在圆槽(31)中,所述第二立柱(41)的顶部固定安装有手握球(43)。
技术总结本技术公开了一种失衡控制能力训练装置,涉及人体工程技术领域,包括底座,所述底座的顶部设有驱动组件,所述驱动组件驱动脚踏板活动,所述脚踏板的表面设有脚踏防滑槽,所述底座的顶部固定安装有防护组件,所述驱动组件包括大转盘和驱动电机,所述大转盘转动安装在底座的顶部;本技术通过驱动组件经过一系列的传动带动不同长度的立柱进行转动,从而改变脚踏板的倾斜方向,以创造出失衡条件,用于训练人们的平衡性,可以在手握球上增加触摸传感器,根据触摸时间来判断训练人员需要扶持的时间,用于对训练人员的平衡性进行评价,用于测试人们的平衡性。技术研发人员:杨锆受保护的技术使用者:浙大城市学院技术研发日:20230825技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240615/78583.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表