一种四肢联动康复训练系统的制作方法
- 国知局
- 2024-07-11 16:24:38
本发明涉及康复治疗,更具体地说,涉及一种四肢联动康复训练系统。
背景技术:
1、四肢联动辅助训练系统是一种通过机械结构配合实现依据人体运动学规律的上下肢联动训练的结构,可帮助患者更好地恢复身体功能。
2、相关技术中,四肢联动辅助训练系统包括联动机构及减速机构,其中上下肢根据人体对称运动的原则,将左上肢与右下肢刚性联接,右上肢与左下肢刚性联接,两部分连接件同轴安装在旋转轴上并在后端连接减速机构以实现减速。此种方式下,上下肢的转动角度完全一致,上肢转动与下肢转动幅度比例完全锁死,然而在实际的康复过程中,前期病人的下肢与上肢的转动比例并不一致,且上下肢的摆动幅度比例关系也与个人实际情况有关,上下肢转动角度不可调节以致上下肢转动角度比例锁死是不能符合实际需求的。
3、综上所述,如何提供一种上下肢转动角度比例可灵活调节的四肢联动辅助训练系统,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供一种四肢联动康复训练系统,可实现上下肢转动角度比例的灵活调节,可满足不同体态、不同患者、不同康复阶段、不同上下肢运动训练方案的使用需求,更能满足四肢康复治疗的实际情况,具有更好的康复治疗效果。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种四肢联动康复训练系统,包括:
4、联动机构,包括与左脚连杆连接的左下肢转轴、与右脚连杆连接的右下肢转轴;
5、所述左下肢转轴通过第一驱动臂组件与第二传动轴转动连接,与左手臂连杆转动连接的左上肢转轴通过与所述第二传动轴的连接实现转动;
6、所述右下肢转轴通过第二驱动臂组件与第一传动轴转动连接,与右手臂连杆转动连接的右上肢转轴通过与所述第一传动轴连接实现转动;
7、第一调节件,设于所述左下肢转轴上,以实现所述第一驱动臂组件与所述左下肢转轴上的左下肢摆杆上任一位置的连接;
8、第二调节件,设于所述右下肢转轴上,以实现所述第二驱动臂组件与所述右下肢转轴上的右下肢摆杆上任一位置的连接。
9、优选的,所述左下肢摆杆随所述左下肢转轴转动且开设有第一槽体,所述第一调节件伸入所述第一槽体内且连接有第一滑块,所述第一滑块内设有与所述第一驱动臂组件转动连接的第一轴承,所述第一调节件转动以调节所述第一滑块在所述第一槽体内的位置。
10、优选的,所述右下肢摆杆随所述右下肢转轴转动且开设有第二槽体,所述第二调节件伸入所述第二槽体内且连接有第二滑块,所述第二滑块内设有与所述第二驱动臂组件转动连接的第二轴承,所述第二调节件转动以调节所述第二滑块在所述第二槽体内的位置。
11、优选的,所述第一驱动臂组件包括第一滑动组件、第二连杆、第三连杆,所述第一滑动组件通过第一连杆与所述第二传动轴转动连接;
12、所述第二连杆两端部分别与所述第一滑动组件、所述左下肢摆杆的所述第一槽体连接,所述第三连杆的两端部分别与所述第一滑动组件、曲柄连杆机构连接,所述曲柄连杆机构通过传动机构与减速机构连接,以实现将所述第一滑动组件的往复运动转化为所述减速机构的旋转运动。
13、优选的,所述第二驱动臂组件包括第二滑动组件、第五连杆、第六连杆,所述第二滑动组件通过第四连杆与所述第一传动轴转动连接;
14、所述第五连杆的两端部分别与所述第二滑动组件、所述曲柄连杆机构连接,所述第六连杆的两端部分别与所述第二滑动组件、所述右下肢摆杆的所述第二槽体连接,所述第一滑动组件和所述第二滑动组件两者的往复运动可共同作业并通过所述曲柄连杆机构驱动所述减速机构。
15、优选的,所述第一滑动组件包括第一固定轴,所述第一固定轴上滑动连接有第一直线轴承、第二直线轴承,所述第一直线轴承通过所述第一连杆与所述第二传动轴转动连接,所述第二连杆、所述第三连杆均与所述第二直线轴承连接。
16、优选的,所述第二滑动组件包括第二固定轴,所述第二固定轴上滑动连接有第三直线轴承、第四直线轴承,所述第五连杆、所述第六连杆均与所述第三直线轴承连接,所述第四直线轴承通过所述第四连杆与所述第一传动轴转动连接。
17、优选的,所述曲柄连杆机构包括第一摆杆、第二摆杆,所述第一摆杆与所述第三连杆连接并通过第一传动杆与曲轴连接,所述第二摆杆与所述第五连杆连接并通过第二传动杆与所述曲轴连接,所述曲轴通过同步带与所述减速机构连接。
18、优选的,所述减速机构包括与所述同步带转动连接的驱动轮,所述驱动轮的一侧同轴连接有飞轮,所述飞轮的外周上设有永磁体,所述飞轮的外周和所述永磁体之间的间距可通过间隙调节机构调节。
19、优选的,所述联动机构包括底座以及设于其两侧的壳体,所述第一滑动组件、所述第二滑动组件均设于所述底座上,所述第一摆杆、第二摆杆均与所述壳体上设置的转动轴转动连接。
20、本发明提供的四肢联动康复训练系统,包括联动机构,联动机构包括与左脚连杆连接的左下肢转轴、与右脚连杆连接的右下肢转轴,左脚连杆给力左下肢转轴转动,右脚连杆给力右下肢转轴转动;左下肢转轴通过第一驱动臂组件与第二传动轴转动连接,而与左手臂连杆转动连接的左上肢转轴通过与第二传动轴的连接实现转动,通过左下肢转轴的转动即可带动左上肢转轴的转动;右下肢转轴通过第二驱动臂组件与第一传动轴转动连接,与右手臂连杆转动连接的右上肢转轴通过与所述第一传动轴连接实现转动,通过右下肢转轴转动即可带动右上肢转轴的转动,通过上述过程实现四肢的康复训练;此外,在左下肢转轴上设有第一调节件,通过第一调节件实现所述第一驱动臂组件与所述左下肢转轴上的左下肢摆杆上任一位置的连接,通过改变第一驱动臂组件在左下肢摆杆的连接位置以改变左手臂连杆、左脚连杆两者转动角度的改变,实现左下肢转轴、左上肢转轴两者传动比的调节;通过设于右下肢转轴上的第二调节件,实现所述第二驱动臂组件与所述右下肢转轴上的右下肢摆杆上任一位置的连接,通过改变第二驱动臂组件在右下肢摆杆的连接位置以改变右手臂连杆、右脚连杆两者转动角度的改变,实现右下肢转轴、右上肢转轴两者传动比的调节。
21、本申请与现有技术相比的有益效果在于:可通过两个调节件的设置,实现上下肢转动角度的灵活调节,实现上下肢转动角度比例的调节,更能满足四肢康复治疗的实际情况,具有更好的康复治疗效果。
技术特征:1.一种四肢联动康复训练系统,其特征在于,包括:
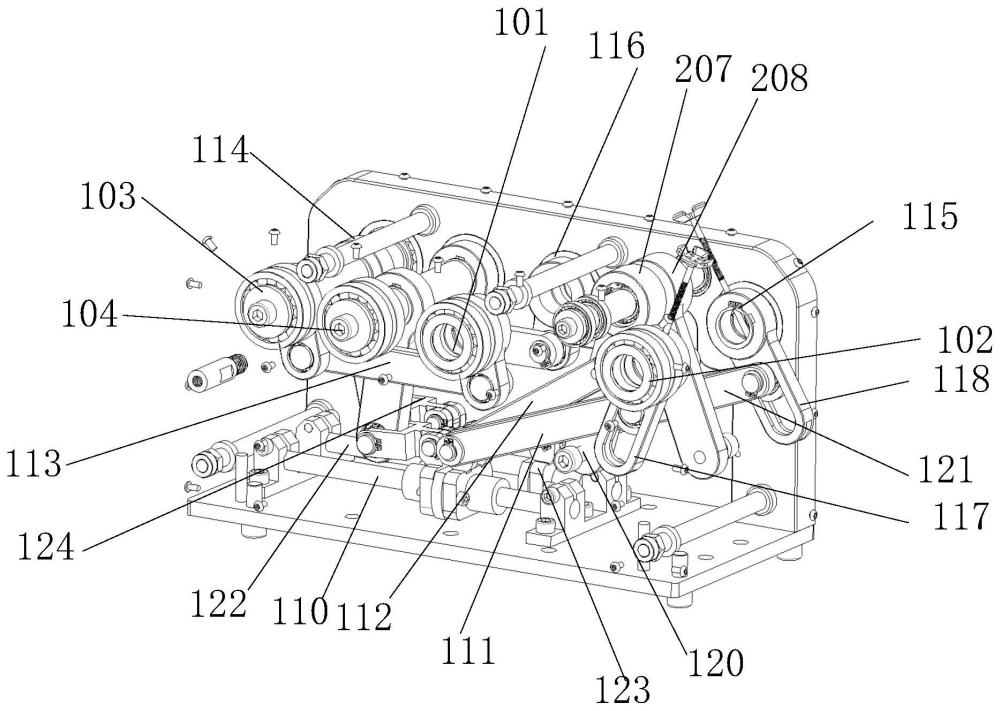
2.根据权利要求1所述的四肢联动康复训练系统,其特征在于,所述左下肢摆杆(117)随所述左下肢转轴(102)转动且开设有第一槽体,所述第一调节件(107)伸入所述第一槽体内且连接有第一滑块,所述第一滑块内设有与所述第一驱动臂组件转动连接的第一轴承,所述第一调节件(107)转动以调节所述第一滑块在所述第一槽体内的位置。
3.根据权利要求2所述的四肢联动康复训练系统,其特征在于,所述右下肢摆杆(118)随所述右下肢转轴(115)转动且开设有第二槽体,所述第二调节件(119)伸入所述第二槽体内且连接有第二滑块,所述第二滑块内设有与所述第二驱动臂组件转动连接的第二轴承,所述第二调节件(119)转动以调节所述第二滑块在所述第二槽体内的位置。
4.根据权利要求3所述的四肢联动康复训练系统,其特征在于,所述第一驱动臂组件包括第一滑动组件、第二连杆(111)、第三连杆(112),所述第一滑动组件通过第一连杆(109)与所述第二传动轴(104)转动连接;
5.根据权利要求4所述的四肢联动康复训练系统,其特征在于,所述第二驱动臂组件包括第二滑动组件、第五连杆(120)、第六连杆(121),所述第二滑动组件通过第四连杆(114)与所述第一传动轴(103)转动连接;
6.根据权利要求5所述的四肢联动康复训练系统,其特征在于,所述第一滑动组件包括第一固定轴(110),所述第一固定轴(110)上滑动连接有第一直线轴承(105)、第二直线轴承(106),所述第一直线轴承(105)通过所述第一连杆(109)与所述第二传动轴(104)转动连接,所述第二连杆(111)、所述第三连杆(112)均与所述第二直线轴承(106)连接。
7.根据权利要求6所述的四肢联动康复训练系统,其特征在于,所述第二滑动组件包括第二固定轴(122),所述第二固定轴(122)上滑动连接有第三直线轴承(123)、第四直线轴承(124),所述第五连杆(120)、所述第六连杆(121)均与所述第三直线轴承(123)连接,所述第四直线轴承(124)通过所述第四连杆(114)与所述第一传动轴(103)转动连接。
8.根据权利要求7所述的四肢联动康复训练系统,其特征在于,所述曲柄连杆机构包括第一摆杆(207)、第二摆杆(208),所述第一摆杆(207)与所述第三连杆(112)连接并通过第一传动杆(201)与曲轴(202)连接,所述第二摆杆(208)与所述第五连杆(120)连接并通过第二传动杆(206)与所述曲轴(202)连接,所述曲轴(202)通过同步带(203)与所述减速机构(3)连接。
9.根据权利要求8所述的四肢联动康复训练系统,其特征在于,所述减速机构(3)包括与所述同步带(203)转动连接的驱动轮(301),所述驱动轮(301)的一侧同轴连接有飞轮(302),所述飞轮(302)的外周上设有永磁体(303),所述飞轮(302)的外周和所述永磁体(303)之间的间距可通过间隙调节机构(304)调节。
10.根据权利要求9所述的四肢联动康复训练系统,其特征在于,所述联动机构(1)包括底座(108)以及设于其两侧的壳体(125),所述第一滑动组件、所述第二滑动组件均设于所述底座(108)上,所述第一摆杆(207)、第二摆杆(208)均与所述壳体(125)上设置的转动轴(126)转动连接。
技术总结本发明公开了一种四肢联动康复训练系统,涉及康复治疗技术领域,包括联动机构,与左脚连杆连接的左下肢转轴通过第一驱动臂组件与第二传动轴转动连接,与左手臂连杆转动连接的左上肢转轴通过与第二传动轴的连接实现转动;与右脚连杆连接的右下肢转轴通过第二驱动臂组件与第一传动轴转动连接,与右手臂连杆转动连接的右上肢转轴通过与第一传动轴连接实现转动;第一调节件设于左下肢转轴上,以实现第一驱动臂组件与左下肢转轴上左下肢摆杆上任一位置的连接;第二调节件设于右下肢转轴上,以实现第二驱动臂组件与右下肢转轴上右下肢摆杆上任一位置的连接;可实现上下肢转动角度比例的灵活调节,可满足不同康复治疗情况的使用需求。技术研发人员:刘国伟,刘斌,李志强,张晋烨,崔东杰受保护的技术使用者:山东新华医疗器械股份有限公司技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240615/79163.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。