一种引体向上评估方法及装置
- 国知局
- 2024-07-11 16:34:39
本发明涉及一种引体向上评估方法及装置,属于智能评估。
背景技术:
1、引体向上作为一项常见的体育锻炼运动项目,它需要握力、上肢力量和肩带力量进行合理的配合,使躯体能够克服自身的重力。在引体向上运动过程中经常会出现肌肉代偿的现象,此外,姿态不正确导致左右肌肉力量分配不平衡,会加重肌肉代偿的现象。如果不及时纠正不正确的姿态,不仅会影响完成标准性动作的数量和质量,在做超负荷的阻力训练时,左右肌肉力量失衡现象会被放大,严重时可能导致肌肉疲劳、肌肉损伤、异常关节压力等问题。因此在引体向上运动过程中要求动作标准,力量分配平衡,以实现改善肌肉代偿。
2、公开号为cn114973401a的中国专利公开了一种基于动作检测与多模态学习的标准化引体向上评估方法,该方法中通过语音关键词控制视频采集,采用单周期波形序列分割法对动作视频进行单次动作检测和提取,对视频片段进行人体骨骼点估计生成单次评估向量,根据判定参数的计算结果进行视频、骨骼数据与音频的多模态学习,该方法主要实现对引体向上计数和标准性评估。公开号为cn109999473a的中国专利公开了一种引体向上智能测试装置,采用红外传感测量依赖红外发射器和红外接收器协同工作,红外对射传感器能够形成训练者头部上下运动的红外行程感应区间,感测运动过程中训练者头部的运动过程,红外传感器与主控装置相连,在主控装置中设置有计数单元和计时单元进行计数,该方法实现自动判定引体向上的动作是否标准,同时还能准确测量引体向上个数。
3、现有技术往往采用公开号为cn114973401a的中国专利中记载的视频图像识别技术与公开号为cn109999473a的中国专利中记载的无线传感器技术,这种非接触式动作检测只能对动作姿态的标准性进行评估,缺乏对运动过程中肌肉发力平衡性问题的考虑。
技术实现思路
1、本发明的目的在于提供一种引体向上评估方法及装置,能够综合评估训练者的动作姿态和肌肉代偿情况。
2、为达到上述目的,本发明提供如下技术方案:
3、第一方面,本发明提供一种引体向上评估方法,包括:
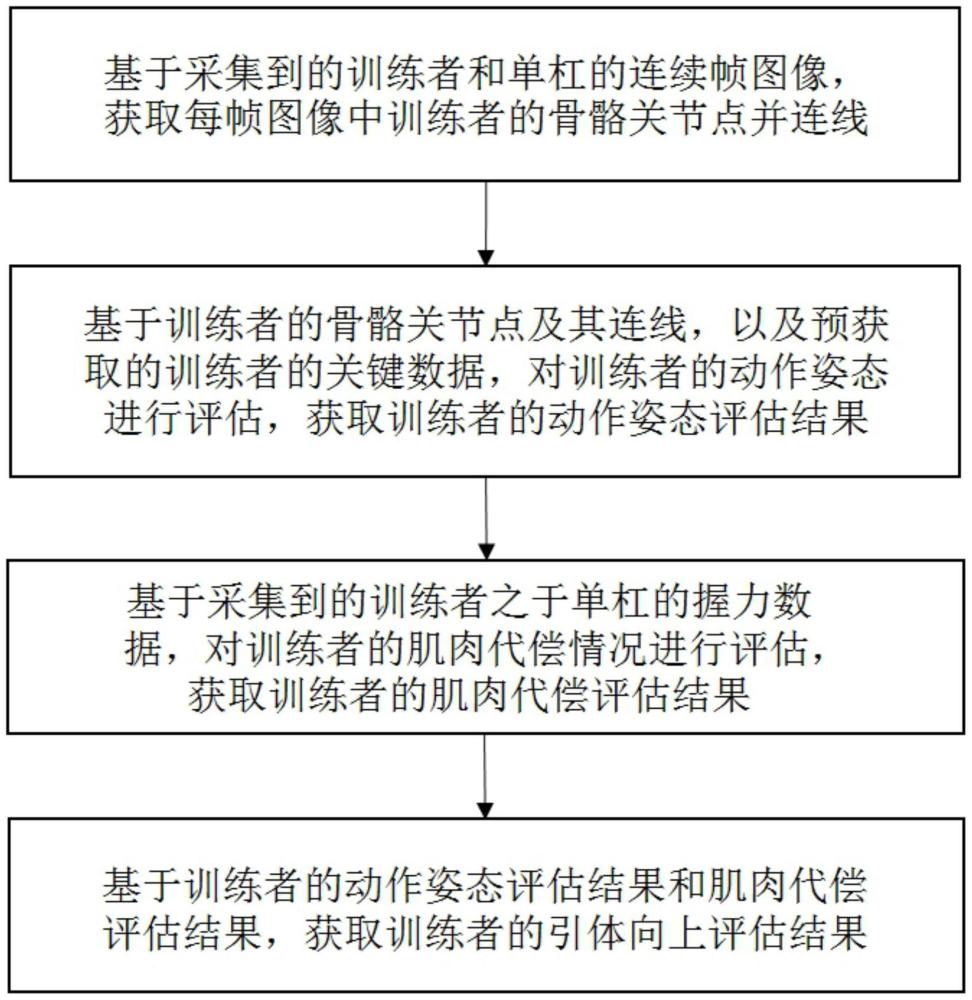
4、基于采集到的训练者和单杠的连续帧图像,获取每帧图像中训练者的骨骼关节点并连线;
5、基于训练者的骨骼关节点及其连线,以及预获取的训练者的关键数据,对训练者的动作姿态进行评估,获取训练者的动作姿态评估结果;
6、基于采集到的训练者之于单杠的握力数据,对训练者的肌肉代偿情况进行评估,获取训练者的肌肉代偿评估结果;
7、基于训练者的动作姿态评估结果和肌肉代偿评估结果,获取训练者的引体向上评估结果;
8、其中,所述关键数据包括训练者的肩宽、大臂长度和小臂长度。
9、结合第一方面,进一步的,获取训练者的关键数据包括:
10、基于训练者提前录入的关键数据,对训练者进行身份验证,根据身份验证结果调用训练者的关键数据;
11、或基于训练者的骨骼关节点的三维坐标,计算获取训练者的关键数据。
12、结合第一方面,进一步的,基于训练者的骨骼关节点及其连线,以及预获取的训练者的关键数据,对训练者的动作姿态进行评估,获取训练者的动作姿态评估结果包括:
13、基于训练者的骨骼关节点及其连线,以及预获取的训练者的关键数据,计算训练者的双手间距与肩宽之差δb12、左肘关节夹角θl、右肘关节夹角θr、左手受力点至左肩关节的距离dli、右手受力点至右肩关节的距离dri、左手至左肩的高度差与右手至右肩的高度差的均值δzabcd;
14、若同时满足θl,θr∈[θmin,180°],dli=dri,且则判断训练者的动作姿态符合标准,否则,判断训练者的动作姿态不符合标准;
15、其中,为第一预设阈值,θmin为第二预设阈值,为第三预设阈值。
16、结合第一方面,进一步的,训练者的双手间距与肩宽之差δb12的计算公式为:
17、δb12=|b2-b1|
18、其中,b1为训练者的肩宽,b2为训练者的左手受力点和右手受力点在单杠上的间距,其中,xai、yai、zai为训练者的左手受力点的x轴、y轴、z轴坐标,xbi、ybi、zbi为训练者的右手受力点的x轴、y轴、z轴坐标;
19、训练者的左肘关节夹角θl的计算公式为:
20、
21、其中,ld为训练者的大臂长度,lu为训练者的小臂长度;
22、训练者的右肘关节夹角θr的计算公式为:
23、
24、训练者的左手受力点至左肩关节的距离dli的计算公式为:
25、
26、其中,xci、yci、zci为训练者的左肩的x轴、y轴、z轴坐标;
27、训练者的右手受力点至右肩关节的距离dri的计算公式为:
28、
29、其中,xdi、ydi、zdi为训练者的右肩的x轴、y轴、z轴坐标;
30、训练者的左手至左肩的高度差与右手至右肩的高度差的均值δzabcd的计算公式为:
31、
32、结合第一方面,进一步的,基于采集到的训练者之于单杠的握力数据,对训练者的肌肉代偿情况进行评估,获取训练者的肌肉代偿评估结果包括:
33、基于采集到的训练者之于单杠的握力数据,对训练者的双臂发力平衡性进行评估,获取训练者的双臂发力平衡性评估结果;
34、利用肌电仪对训练者进行肌电检测,获取肌电信号,并基于所述肌电信号对训练者的肌肉代偿情况进行评估,获取训练者的肌肉代偿评估结果。
35、结合第一方面,进一步的,基于采集到的训练者之于单杠的握力数据,对训练者的双臂发力平衡性进行评估,获取训练者的双臂发力平衡性评估结果包括:
36、基于采集到的训练者之于单杠的握力数据,计算训练者的左手握力与右手握力之差δflri;
37、若则判断训练者的双臂发力平衡,否则,判断训练者的双臂发力不平衡;
38、其中,为第四预设阈值;
39、训练者的左手握力与右手握力之差δflri的计算公式为:
40、δflri=|fli-fri|
41、其中,fli为训练者的左手握力值,fri为训练者的右手握力值。
42、结合第一方面,进一步的,基于所述肌电信号对训练者的肌肉代偿情况进行评估,获取训练者的肌肉代偿评估结果包括:
43、基于所述肌电信号的波形稳定程度,判断训练者的发力稳定性;
44、基于所述肌电信号,统计训练者各肌肉的均方根振幅rms,判断训练者的发力强度;
45、基于所述肌电信号,对训练者各肌肉进行mvc标准化处理,判断训练者的肌肉相对活跃度;
46、基于训练者的发力稳定性、发力强度和肌肉相对活跃度,获取训练者的肌肉代偿评估结果。
47、第二方面,本发明提供一种如第一方面任一项所述引体向上评估方法的引体向上评估装置,包括数据采集单元、控制单元、显示单元和数据存储单元;所述数据采集单元、显示单元和数据存储单元均与所述控制单元信号连接,向所述控制单元反馈信号并受所述控制单元控制;
48、其中,所述数据采集单元包括:
49、摄像机:用于采集训练者和单杠的连续帧图像;
50、握力传感器:用于采集训练者之于单杠的握力数据;
51、肌电仪:用于采集训练者的肌电信号;
52、所述控制单元用于对所述数据采集单元采集到的数据进行筛选和逻辑运算,并向所述数据采集单元、显示单元和数据存储单元发送相应的控制信号;
53、所述数据采集单元用于根据所述控制单元发送的控制信号采集数据;
54、所述显示单元用于根据所述控制单元发送的控制信号显示训练者的训练过程和引体向上评估结果;
55、所述数据存储单元用于根据所述控制单元发送的控制信号对所述数据采集单元采集到的数据进行存储和管理。
56、与现有技术相比,本发明的有益效果是:
57、本发明提供的引体向上评估方法,基于训练者的骨骼关节点及其连线,以及训练者的关键数据,对训练者的动作姿态进行评估,基于训练者之于单杠的握力数据,对训练者的肌肉代偿情况进行评估,能够综合评估训练者的动作姿态和肌肉代偿情况。
58、本发明提供的引体向上评估装置,相较于现有的引体向上检测设备,增加了握力传感器,在识别动作姿态准确性的基础上,结合左右臂肌肉力量分配的平衡性,对训练者的引体向上运动过程进行全面评估。
本文地址:https://www.jishuxx.com/zhuanli/20240615/80008.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表