一种基于摄像头的迷宫机器人竞赛计分系统
- 国知局
- 2024-07-11 16:38:20
本发明涉及一种基于摄像头的迷宫机器人竞赛计分系统,属于通信领域。
背景技术:
1、当前迷宫机器人竞赛计分系统主要有三种,分别为激光对射式计分系统、超声波测距式计分系统以及激光测距式计分系统。激光对射式计分系统共有五个装置,其中用于起点检测和终点检测的装置各两个,分别为激光发射板和环境光检测板,另外包括一个数据接收板;超声波测距式计分系统共有三个装置,其中用于起点检测和终点检测的装置各一个,另外包括一个数据接收模块;激光测距式计分系统共有三个装置,其中用于起点检测和终点检测的装置各一个,另外包括一个数据接收模块。
2、现有技术存在以下问题:
3、1、激光对射式计分系统中光照返回数据计算简单,测算间隔低,但是整套系统需要五个装置,成本较高;且安装时须保证环境光传感器处于激光照射下,安装要求较高。
4、2、超声波测距式计分系统仅有三个装置,降低了成本,但是超声波测距范围广、线性度差,存在较大的误差,对于计分系统需要高精度的需求不适用。
5、3、激光测距式计分系统同样减少了装置的数量,但是对环境光较为敏感,需要配备遮光罩;且激光测距传感器需要进行校准及距离测算,操作不当容易影响精度产生误判。
技术实现思路
1、针对上述问题,本发明提出一种基于摄像头的迷宫机器人竞赛计分系统,能够避免上述所发生的问题,并且可以使结果更加精确。
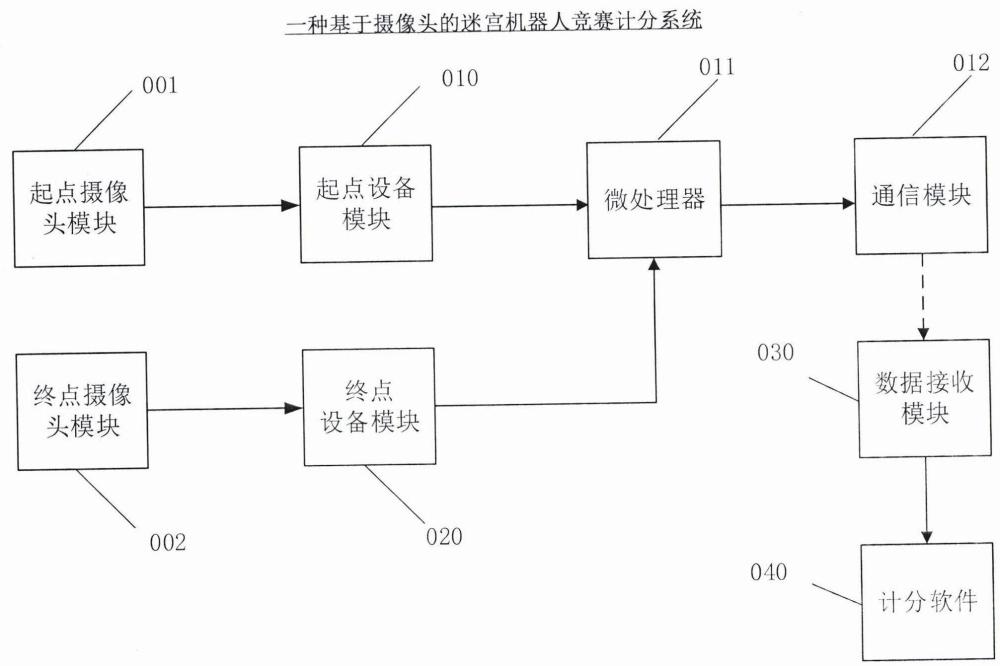
2、本发明提供了一种基于摄像头的迷宫机器人竞赛计分系统,本系统主要包括起点设备模块,终点设备模块,数据接收模块及计分软件。
3、进一步地,上述系统还具有以下特点,起点设备模块仅需要一个装置完成检测;终点设备模块只需一个装置完成检测。
4、进一步地,上述系统还具有以下特点,起点设备模块包括摄像头模块、微处理器、通信模块;终点设备模块包括摄像头模块、微处理器、通信模块。
5、进一步地,上述系统还具有以下特点,摄像头模块与微处理器相连,用于判断是否有机器人经过,并将采集到的信息传输给微处理器。
6、进一步地,上述系统还可以具有以下特点,未处理器与通信模块相连,将摄像头模块传递的信息处理后,经由通信模块发给数据接收模块。
7、进一步地,上述系统还可以具有以下特点,数据接收模块与上位机pc相连,上位机pc在获取到起点设备模块和终点设备模块传输的数据,通过数据处理后将选手的比赛信息显示在计分软件上。
8、进一步地,上述系统还可以具有以下特点,起点设备模块和终点设备模块包含辅助电源电路,为其他模块提供能量。
9、进一步地,上述系统还可以具有以下特点,起点设备模块和终点设备模块还含有充电模块,usb接口为type-c口,当电池供电不足时,可用常规type-c接口即可给电池充电。
10、进一步地,上述系统还可以具有以下特点,起点设备模块和终点设备模块的充电模块中包含usb-pd充电协议,可以实现大功率充电。
11、进一步地,上述系统还可以具有以下特点,起点设备模块和终点设备模块的type-c接口集成了jtag接口下载和调试协议,可通过type-c接口实现stm32f407程序下载。
12、进一步地,上述系统还可以具有以下特点,起点设备模块和终点设备模块还含有低电压报警电路,当电池电压低于阈值时,蜂鸣器会报警。
13、进一步地,上述系统还可以具有以下特点,起点设备模块和终点设备模块中还含有电池管理模块,使用tp5400监测电池充电过程,防止电池过充;另外包含充电指示灯,充满时灯会发光作为提示。
14、本发明根据图像检测起点信号和终点信号,有以下优点:
15、第一,图像检测更加灵敏,可以避免对信号的遗漏,提高了计分系统的准确性。
16、第二,采用摄像头回传数据进行检测可以处理更多复杂的可能性,提高了计分系统的应对能力。
17、第三,摄像头模块不需要配备外围电路,可以有效减小系统的电路板面积,从而降低成本。
技术特征:1.一种基于摄像头的迷宫机器人竞赛计分系统,其特征在于,所述的系统包括:
2.根据权利要求1所描述的一种基于摄像头的迷宫机器人竞赛计分系统,其特征在于,
3.根据权利要求1所描述的一种基于摄像头的迷宫机器人竞赛计分系统,其特征在于,
4.根据权利要求1所描述的一种基于摄像头的迷宫机器人竞赛计分系统,其特征在于,
技术总结本发明提供了一种基于摄像头的迷宫机器人竞赛计分系统,属于通信领域。本系统主要包括起点设备模块、终点设备模块、上位机数据接收模块,计分系统四部分。起点设备模块中包括摄像头模块,摄像头模块与起点装置中微处理器相连接,终点设备模块中包括摄像头模块,摄像头模块与终点装置中微处理器相连接,该摄像头模块体积小,仅需在迷宫起点和终点板一侧留出小窗口即可实现图像采集,不会对迷宫机器人的运行造成影响。基于摄像头的迷宫机器人竞赛计分系统具有检测精度高,检测速度快的特点;同时可以避免环境因素对迷宫机器人计分系统的影响,与现有技术相比,该系统提高了系统工作的稳定性,避免系统受环境干扰,进一步提高了其测量的准确性。技术研发人员:袁臣虎,苏嘉伟,张习文受保护的技术使用者:天津工业大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240615/80348.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表