一种提高移动喷涂打印机器人位置精度的方法及其系统与流程
- 国知局
- 2024-07-05 15:56:40
本发明属于,具体涉及一种提高移动喷涂打印机器人位置精度的方法及其系统。
背景技术:
1、具备喷涂打印功能的移动机器人可应用于各式各样的场景,主要应用于建筑物施工工地放线、工厂规划定位放线、展览场馆规划布局、道路标识标线施工等场景。本申请所针对的是一种应用在平面(例如建筑装修待施工地面、工厂设备安装地面、展览馆布展地面、道路建设标识标线地面等)上喷涂或打印符号、文字、曲线等有指定含义标记的移动机器人。
2、此类移动机器人最难的挑战在于如何精准无误的将设计信息传递在平面上。在实际工程应用中,施工方所需的精度要求一般在公分甚至毫米级别,然而,移动机器人的定位很难做到如此精准。移动机器人在空间中的位置定位普遍采用的方法是利用传感器(通常是激光雷达)实时感知机器人与已知周边环境即地图(如墙面、立柱)的距离。
3、现有顶级的传感器也只能做到公分级精度定位,即使在建图、定位算法等环节反复优化的情况下,这样就限制了移动机器人的定位能力。在上述的应用场景通常采用人工物理标记的形式,将纸质设计图、数字化需求呈现在施工地面。具体到实际操作主要采用工程师手动测量加物理标记,如测量柱、墙的距离,通过牵引墨线放线在作业面上。此过程中通常采用全站仪精确引导,以提升作业效率和定位准确率。
4、绝对定位装置一般基于光和自动控制技术实现高精度三维测量,具有便携式的特点,主要用于大尺寸空间坐标测量领域。通常采用激光干预测距、角度测量等先进技术。基于球坐标法的测量原理,通过测量角度和距离,可以实现三维坐标的精确测量。目前在大尺寸精密测量领域,一般采用具有测量范围广、精度高、功能多、可现场测量等优点的激光跟踪仪。通过它可以取代许多传统的测量设备,如大型固定三坐标测量机、经纬仪和全站仪等,在设备校准、零部件检测、工装制造和调试、集成组装和逆向工程等应用领域显示出高测量精度和效率。而一般的大型建筑、地下隧道施工、场馆建设等精密工程测量或变形监测领域,则广泛采用具有角度测量、距离(斜距、平距、高差)测量、三维坐标测量、导线测量、交会定点测量和放样测量等多种功能的全站仪(全站型电子速测仪)。综上所述,本发明的目的是将绝对定位装置扩展在移动机器人上的一种应用,该移动机器人具有在平面内按照规划的任意轨迹移动、且可描绘出移动轨迹轮廓的功能。
技术实现思路
1、本发明的目的在于设计出一种提高移动喷涂打印机器人位置精度的方法及其系统,用于改进移动喷涂打印机器人位置精度。
2、为了实现上述目的,本发明采用的技术方案如下:
3、一种提高移动喷涂打印机器人位置精度的方法,其特征在于:所述方法如下:
4、s1:启动移动机器人,初始化移动机器人绝对定位装置,然后手动引导反射装置坐标转换,反射装置引导激光至机器人;
5、s2:绝对定位装置采集移动机器人的直线运动坐标变化信息,并通过通信设备传送至移动机器人控制单元的数据运算解析模块,通过此模块解析出由直线运动引起的偏航角数据变化分量a;姿态传感器采集移动机器人的旋转运动产生的角度位移信息,经内部传输至控制单元的数据处理模块解析处理得出变化分量b;
6、s3:控制单元的数据叠加模块叠加运算变化分量a和变化量b,生成反射装置安装机构需要执行的运行数据,使得反射装置始终朝向绝对定位装置所在方向,实现双方的互相锚定;
7、s4:通过绝对定位装置采集t0时刻坐标数据;再操作移动机器人沿其x轴指向直线运动,绝对定位装置采集t1时刻坐标数据;通过控制单元解析出移动机器人坐标系x轴在绝对坐标系中的方向;
8、s5:将s3中数据与姿态传感器获取的数据进行对比,得出移动机器人的x轴与姿态传感器的x轴的固有角度偏差参数,系统自动存档此参数;
9、s6:在设定周期内定期校核此参数,并对比启动初始化时此参数的数值,减弱每个周期内零飘所造成的误差干扰,进而提高移动喷涂打印机器人位置精度。
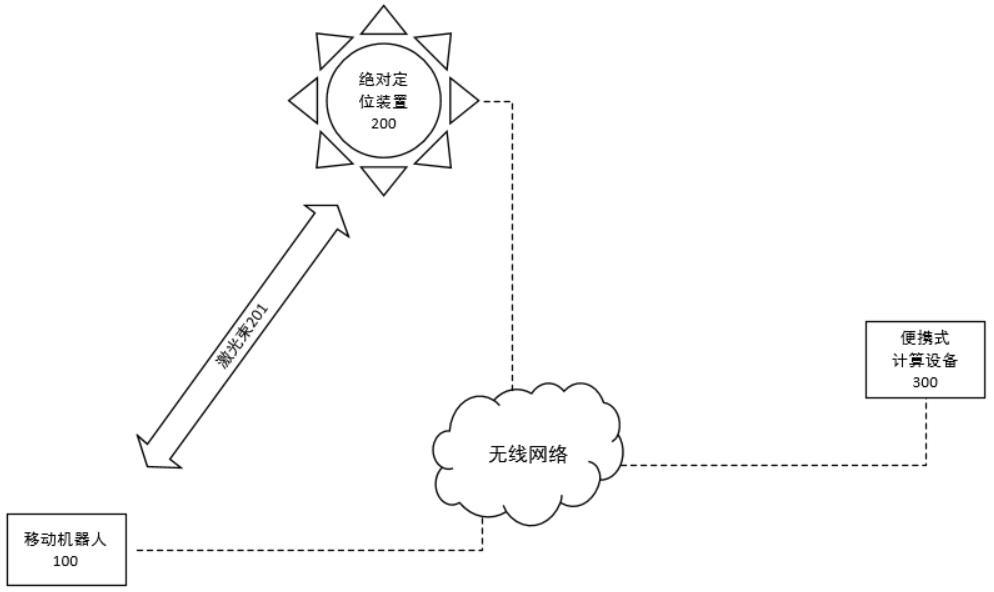
10、一种提高移动喷涂打印机器人位置精度的系统,所述系统由移动机器人、绝对定位装置以及便捷式计算设备组合,所述移动机器人、绝对定位装置以及便捷式计算设备之间通过无线网络建立通讯,绝对定位装置通过发射激光束照射移动机器人的反射装置。
11、进一步的,所述移动机器人包括底盘系统和壳体,壳体顶部通过安装机构安装反射装置,壳体内安装电池、控制单元以及通信设备,壳体前方或侧边安装障碍物感知传感器、坑洞避让传感器以及喷涂打印系统。
12、进一步的,绝对定位装置用于测量待测物实时位移、距离、角度等的测量仪器,包括但不限于全站仪、跟踪仪、位置监测设备。
13、进一步的,底盘系统具备行驶、转向等功能,可按照规划轨迹自动行驶,采用轮式或履带式底盘形式,所述的轮式形式包括但不局限于双轮差速驱动、四轮驱动或转向、麦克纳姆轮驱动转向、全向轮驱动转向、履带式驱动或转向。
14、进一步的,喷涂打印系统主要用于绘制规划曲线、字符、图形等任意形态设计语言,具体包括但不限于喷涂、喷墨、挤压形式。
15、现有技术中,施工布局划线需要设计师与工人准确反复沟通,由于工地环境恶劣、长时间作业以及技能水平,容易犯一些没有注意到的错误,导致返工、延期及预算超支,而采用本发明技术方案可以得到以下有益效果:
16、本发明方法和系统能够达到在公分甚至毫米级别的精度,绝对定位装置和移动机器人的结合应用具有在平面内按照规划的任意轨迹移动、且可描绘出移动轨迹轮廓的功能。移动机器人接收绝对定位装置反馈的位置信息精确控制行驶和喷涂打印轨迹。
17、提高施工效率和质量:实现全自动作业,只需将cad图纸或bim数据导入机器人中,机器人即可自动生成作业路径,全自动喷涂打印作业且无需人工干预。
18、提高精度和准确度:cad图纸直接导入喷涂打印机器人中,机器人根据基准坐标生成作业路径,这将极大的提高施工精度、减少人为错误。
19、简化沟通和协作:喷涂打印机器人在建筑中的关键优势之一是数字化且数据共享,使得数据实时更新和数据共享变得更加容易,从而总体上改善团队合作沟通协作。
20、提高安全性及降低风险:喷涂打印机器人可显著降低职业危害,有助于工人避免受伤并保持健康,机器人还配备危险检测传感器以提高整体安全性。
技术特征:1.一种提高移动喷涂打印机器人位置精度的方法,其特征在于:所述方法如下:
2.一种提高移动喷涂打印机器人位置精度的系统,其特征在于:所述系统由移动机器人、绝对定位装置以及便捷式计算设备组合,所述移动机器人、绝对定位装置以及便捷式计算设备之间通过无线网络建立通讯,绝对定位装置通过发射激光束照射移动机器人的反射装置。
3.根据权利要求2所述的一种提高移动喷涂打印机器人位置精度的系统,其特征在于:所述移动机器人包括底盘系统和壳体,壳体顶部通过安装机构安装反射装置,壳体内安装电池、控制单元以及通信设备,壳体前方或侧边安装障碍物感知传感器、坑洞避让传感器以及喷涂打印系统。
4.根据权利要求2所述的一种提高移动喷涂打印机器人位置精度的系统,其特征在于:绝对定位装置用于测量待测物实时位移、距离、角度等的测量仪器,包括但不限于全站仪、跟踪仪、位置监测设备。
5.根据权利要求2所述的一种提高移动喷涂打印机器人位置精度的系统,其特征在于:底盘系统具备行驶、转向等功能,可按照规划轨迹自动行驶,采用轮式或履带式底盘形式,所述的轮式形式包括但不局限于双轮差速驱动、四轮驱动或转向、麦克纳姆轮驱动转向、全向轮驱动转向、履带式驱动或转向。
6.根据权利要求2所述的一种提高移动喷涂打印机器人位置精度的系统,其特征在于:喷涂打印系统主要用于绘制规划曲线、字符、图形等任意形态设计语言,具体包括但不限于喷涂、喷墨、挤压形式。
技术总结本发明公开了一种提高移动喷涂打印机器人位置精度的方法及其系统,所述系统由移动机器人、绝对定位装置以及便捷式计算设备组合,所述移动机器人、绝对定位装置以及便捷式计算设备之间通过无线网络建立通讯,本发明能够达到在公分甚至毫米级别的精度,绝对定位装置和移动机器人的结合应用具有在平面内按照规划的任意轨迹移动、且可描绘出移动轨迹轮廓的功能。移动机器人接收绝对定位装置反馈的位置信息精确控制行驶和喷涂打印轨迹。技术研发人员:常华利,刘洪受保护的技术使用者:佛山道善智能机器人有限公司技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240617/39427.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表