铲板机器人的制作方法
- 国知局
- 2024-07-05 16:11:41
本公开涉及化纤生产,尤其涉及一种铲板机器人。
背景技术:
1、在化纤行业中纺丝箱体生产出化纤丝(例如化纤长丝)的过程中,在纺丝箱体中喷丝板的板面会存在熔体破裂物,形成硬粘结物使喷丝板的喷丝孔喷出的丝线细流弯曲,造成纺丝断头或拉伸毛丝增加,同时在喷丝孔表面也可能积累杂质粒子划伤丝线,因此,需要对纺丝箱体中喷丝板上的待清理物进行清理,以保障纺丝箱体生产出化纤丝的质量。
2、在相关技术中,传统铲板方式为人工铲板,耗时耗力。
技术实现思路
1、本公开提供了一种铲板机器人,以对纺丝箱体中喷丝板上的待清理物进行清理。
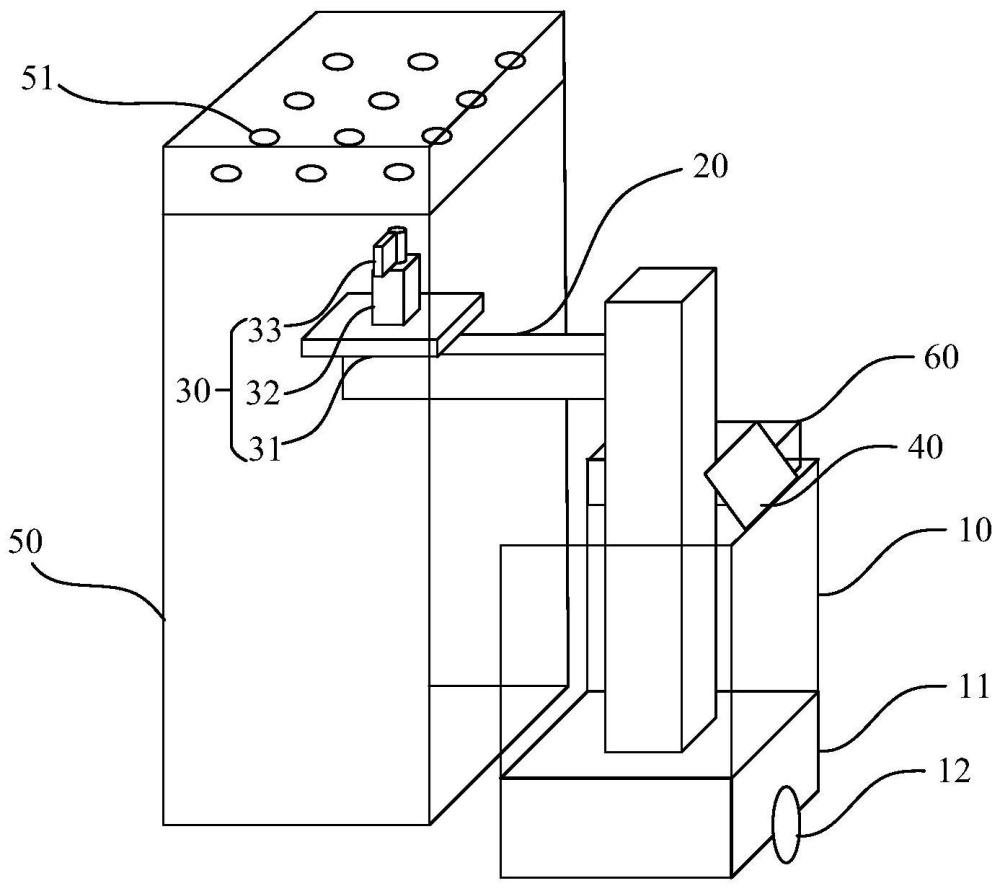
2、根据本公开的一方面,提供了一种铲板机器人,包括本体、机械臂、刀头组件和控制器。
3、本体具有用于在车间行走的移动部。
4、机械臂一端连接于本体上。
5、刀头组件包括连接于机械臂的另一端的架体、连接于架体的驱动部以及与驱动部可拆卸连接的刮蹭部,刮蹭部用于与纺丝箱体中的喷丝板接触,驱动部用于驱动刮蹭部相对架体旋转。
6、控制器用于控制机械臂相对本体运动,以使刮蹭部与喷丝板接触,且控制器还用于控制驱动部带动刮蹭部旋转,以使刮蹭部去除喷丝板上的待清理物。
7、在一种实施方式中,刮蹭部包括多个刀头,多个刀头中的每个刀头用于与一个喷丝板接触。
8、驱动部包括可转动连接于架体的多个输出端,多个刀头分别一一对应地可拆卸连接于多个输出端,输出端用于驱动与输出端对应的刀头相对架体旋转。
9、在一种实施方式中,输出端设置有卡合部,刀头设置有连接部,连接部与卡合部形状配合连接。
10、在一种实施方式中,卡合部包括沿第一方向延伸的长形槽,连接部包括沿第一方向延伸的长形凸台,第一方向与刀头的旋转轴线垂直。
11、或者,卡合部包括沿第一方向延伸的长形凸台,连接部包括沿第一方向延伸的长形槽,第一方向与刀头的旋转轴线垂直。
12、在一种实施方式中,输出端上设置有能够相对输出端移动的锁定件,连接部上设置有锁定孔,在连接部与卡合部形状配合连接的情况下,锁定件能够相对输出端移动,以使锁定件插设于锁定孔中。
13、在一种实施方式中,驱动部包括驱动器以及传动组件,驱动器和传动组件均与架体连接,驱动器的输出轴与传动组件的输入端连接,传动组件包括多个输出端。
14、在一种实施方式中,驱动部包括多个驱动器,多个驱动器中的每个驱动器的输出轴与一个刀头可拆卸连接,且输出轴构成输出端。
15、在一种实施方式中,刀头包括多个刀片,多个刀片沿刀头的圆周方向排列。
16、在一种实施方式中,刀头设置有压力传感器,压力传感器用于检测刀头与喷丝板之间的接触压力。
17、控制器用于在接触压力满足预设阈值时,控制驱动部带动刀头旋转。
18、在一种实施方式中,压力传感器设置于刀头与输出端之间。
19、在一种实施方式中,车间具有巡检机器人,本体设置有刀头收纳区,刀头收纳区用于容纳待更换刀头,巡检机器人用于将多个刀头中需要更换的刀头从刀头组件中拆下,并将拆下后的刀头放置于刀头收纳区,且巡检机器人还用于将待更换刀头安装至刀头组件。
20、在一种实施方式中,移动部包括用于在车间的地面行走的移动轮。
21、或者,移动部包括用于在车间的吊轨上移动的滚动轮。
22、根据本公开的方案,可以通过可拆卸的刮蹭部去除纺丝箱体中喷丝板上的待清理物,避免由于喷丝板上的待清理物降低纺丝箱体生产出化纤丝的质量。
23、应当理解,技术实现要素:部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
技术特征:1.一种铲板机器人,其特征在于,包括:
2.根据权利要求1所述的铲板机器人,其特征在于,
3.根据权利要求2所述的铲板机器人,其特征在于,
4.根据权利要求3所述的铲板机器人,其特征在于,
5.根据权利要求3所述的铲板机器人,其特征在于,
6.根据权利要求2所述的铲板机器人,其特征在于,
7.根据权利要求2所述的铲板机器人,其特征在于,
8.根据权利要求2-7中任一项所述的铲板机器人,其特征在于,
9.根据权利要求2-7中任一项所述的铲板机器人,其特征在于,所述刀头设置有压力传感器,所述压力传感器用于检测所述刀头与所述喷丝板之间的接触压力;
10.根据权利要求9所述的铲板机器人,其特征在于,所述压力传感器设置于所述刀头与所述输出端之间。
11.根据权利要求2-6中任一项所述的铲板机器人,其特征在于,所述车间具有巡检机器人,所述本体设置有刀头收纳区,所述刀头收纳区用于容纳待更换刀头,所述巡检机器人用于将所述多个刀头中需要更换的刀头从所述刀头组件中拆下,并将拆下后的所述刀头放置于所述刀头收纳区,且所述巡检机器人还用于将所述待更换刀头安装至所述刀头组件。
12.根据权利要求1-6中任一项所述的铲板机器人,其特征在于,
技术总结本公开提供了一种铲板机器人,涉及化纤生产技术领域。其中,铲板机器人包括:本体、机械臂、刀头组件和控制器。本体具有用于在车间行走的移动部;机械臂一端连接于本体上;刀头组件包括连接于机械臂的另一端的架体、连接于架体的驱动部以及与驱动部可拆卸连接的刮蹭部,刮蹭部用于与纺丝箱体中的喷丝板接触,驱动部用于驱动刮蹭部相对架体旋转;控制器用于控制机械臂相对本体运动,以使刮蹭部与喷丝板接触,且控制器还用于控制驱动部带动刮蹭部旋转,以使刮蹭部去除喷丝板上的待清理物。根据本公开的方案,可以通过可拆卸的刮蹭部去除纺丝箱体中喷丝板上的待清理物,避免由于喷丝板上的待清理物降低纺丝箱体生产出化纤丝的质量。技术研发人员:王鹏,彭先涛,李大可,张耀斌,樊会涛,闫东宁,李焕伟受保护的技术使用者:浙江恒逸石化有限公司技术研发日:20230831技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240617/41020.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表