一种适用于消防机器人的烟感探测器
- 国知局
- 2024-07-05 16:56:50
本技术涉及消防机器人,具体为一种适用于消防机器人的烟感探测器。
背景技术:
1、随着社会消防意识的提高,灭火机器人的应用越来越广泛,其中消防排烟灭火机器人在灭火救援中发挥着举足轻重的作用,可代替消防救援人员进入有毒、缺氧或浓烟等危险灾害事故现场进行排烟、送风、灭火、除尘及搜救工作,而消防排烟灭火机器人中不可或缺的就是烟感探测器。
2、现有的消防排烟灭火机器人在需要检测一个空间内是否存在有毒气体时,因为有毒气体的密度各不相同,在空气中漂浮的高度各不相同,而现有的灭火机器人上的烟感探测器往往是固定的,这就导致在空间中检测的空气浓度数值并不准确。
3、经检索授权公开号为cn218589572u的专利公开了一种消防机器人,包括自主移动平台、三自由度消防机械臂、水箱、第一双目视觉传感器、红外图像传感器、co2气体传感器、co气体传感器、控制系统;所述自主移动平台具有主动避障功能,所述三自由度消防机械臂能完成水平转动、竖直移动及三自由度消防机械臂执行末端的俯仰运动;三自由度消防机械臂的执行末端为消防喷头,消防喷头与自主移动平台上的水箱通过相应的水路管道连接;控制系统能够获取co2气体传感器、co气体传感器、第一双目视觉传感器、红外图像传感器的相应数据,并对数据进行处理确定火源位置。机器人集消防、报警于一体,运动灵活,可适用于多种场合,能及时且定点灭火,尤其是可以在火灾初期进行灭火。
4、上述现有的消防机器人虽然能及时且定点灭火,但是仍然存在不能改变烟感探测器的探测高度,不能实时监测空间内有毒气体的浓度范围。
技术实现思路
1、针对现有技术的不足,本实用新型提供一种适用于消防机器人的烟感探测器,机器人本体在空间内进行气体探测时,可以通过支撑臂和伸展臂调整探测器本体的高度,从而可以探测不同高度的空气中有毒气体浓度。
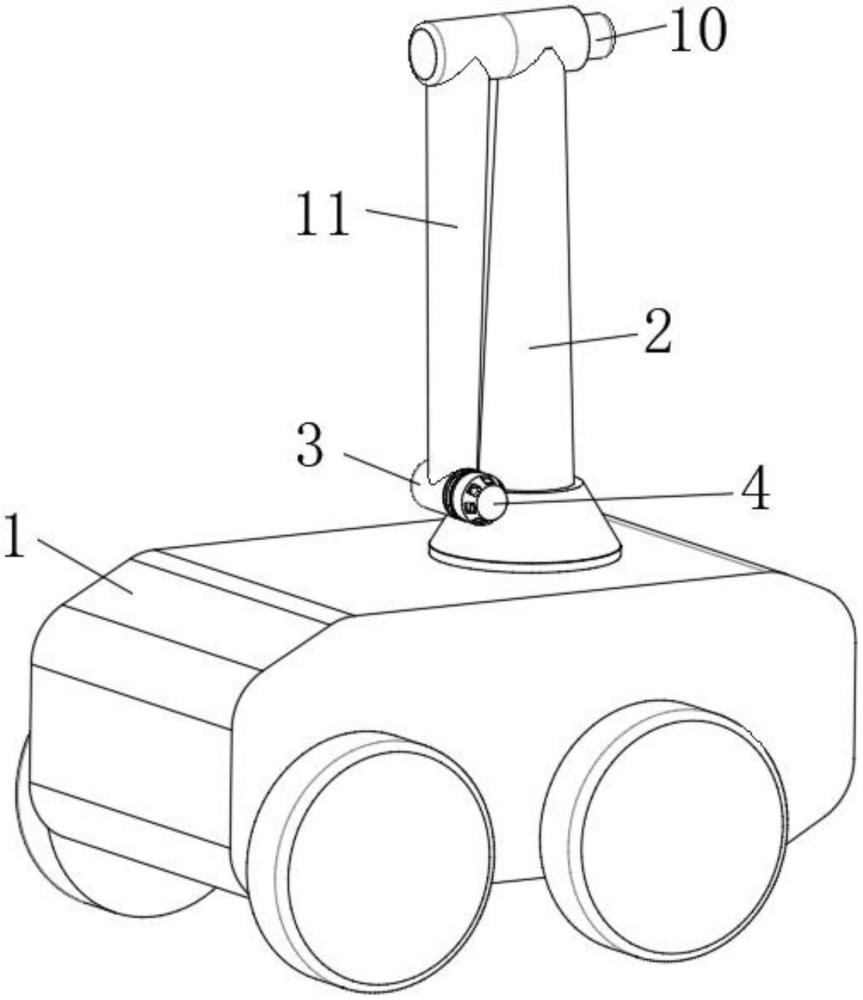
2、为实现上述的目的,本实用新型提供如下技术方案:一种适用于消防机器人的烟感探测器,包括安装在机器人本体上的探测器本体,探测器本体的内壁固定连接有芯片,机器人本体的上表面固定连接有支撑臂,支撑臂的另一端固定连接有旋转电机,旋转电机的输出轴贯穿支撑臂并固定连接有伸展臂,伸展臂的另一端固定连接有连接柱,连接柱远离支撑臂的一端连接有吸气机构,探测器本体的背面贯穿开设有吸气口,吸气机构远离连接柱的一端与探测器本体连接并与吸气口连通。
3、进一步地,吸气机构包括吸气电机和叶轮,吸气电机的外壁与连接柱固定连接,吸气电机的输出轴与叶轮固定连接,叶轮的另一端与探测器本体连接并与吸气口连通。
4、进一步地,连接柱靠近吸气电机的一端固定连接有连接块,叶轮远离吸气电机的一侧与连接块转动连接,连接块远离叶轮的一端与探测器本体连接。
5、进一步地,探测器本体靠近连接块的一侧开设有与吸气口连通的连接腔,连接腔与连接块螺纹连接。
6、进一步地,连接柱与连接块之间固定连接有出气网,出气网套设在叶轮的外部。
7、进一步地,芯片与吸气口之间留有间隙。
8、与现有技术对比,本实用新型具备以下有益效果:
9、该种适用于消防机器人的烟感探测器,通过在机器人本体上增加支撑臂和伸展臂,当机器人本体在空间内进行气体探测时,可以通过支撑臂和伸展臂调整探测器本体的高度,从而可以探测空间内的空气中不同高度有毒气体浓度的变化。
技术特征:1.一种适用于消防机器人的烟感探测器,包括安装在机器人本体(1)上的探测器本体(4),探测器本体(4)的内壁固定连接有芯片(5),其特征在于:机器人本体(1)的上表面固定连接有支撑臂(2),支撑臂(2)的另一端固定连接有旋转电机(10),旋转电机(10)的输出轴贯穿支撑臂(2)并固定连接有伸展臂(11),伸展臂(11)的另一端固定连接有连接柱(3),连接柱(3)远离支撑臂(2)的一端连接有吸气机构,探测器本体(4)的背面贯穿开设有吸气口(401),吸气机构远离连接柱(3)的一端与探测器本体(4)连接并与吸气口(401)连通。
2.根据权利要求1所述的一种适用于消防机器人的烟感探测器,其特征在于:吸气机构包括吸气电机(8)和叶轮(7),吸气电机(8)的外壁与连接柱(3)固定连接,吸气电机(8)的输出轴与叶轮(7)固定连接,叶轮(7)的另一端与探测器本体(4)连接并与吸气口(401)连通。
3.根据权利要求2所述的一种适用于消防机器人的烟感探测器,其特征在于:连接柱(3)靠近吸气电机(8)的一端固定连接有连接块(9),叶轮(7)远离吸气电机(8)的一侧与连接块(9)转动连接,连接块(9)远离叶轮(7)的一端与探测器本体(4)连接。
4.根据权利要求3所述的一种适用于消防机器人的烟感探测器,其特征在于:探测器本体(4)靠近连接块(9)的一侧开设有与吸气口(401)连通的连接腔(402),连接腔(402)与连接块(9)螺纹连接。
5.根据权利要求3或4所述的一种适用于消防机器人的烟感探测器,其特征在于:连接柱(3)与连接块(9)之间固定连接有出气网(6),出气网(6)套设在叶轮(7)的外部。
6.根据权利要求1、2、3或4所述的一种适用于消防机器人的烟感探测器,其特征在于:芯片(5)与吸气口(401)之间留有间隙。
7.根据权利要求5所述的一种适用于消防机器人的烟感探测器,其特征在于:芯片(5)与吸气口(401)之间留有间隙。
技术总结本技术涉及消防机器人技术领域,且公开了一种适用于消防机器人的烟感探测器,包括安装在机器人本体上的探测器本体,探测器本体的内壁固定连接有芯片,机器人本体的上表面固定连接有支撑臂,支撑臂的另一端固定连接有旋转电机,旋转电机的输出轴贯穿支撑臂并固定连接有伸展臂,伸展臂的另一端固定连接有连接柱,连接柱远离支撑臂的一端连接有吸气机构,探测器本体的背面贯穿开设有吸气口。该种适用于消防机器人的烟感探测器,通过在机器人本体上增加支撑臂和伸展臂,当机器人本体在空间内进行气体探测时,可以通过支撑臂和伸展臂调整探测器本体的高度,从而可以探测空间内的空气中不同高度有毒气体浓度的变化。技术研发人员:余秋朋,邓薪呈,伍鼎健,谢俊慧,顾圆卓,凡思逸受保护的技术使用者:重庆工贸职业技术学院技术研发日:20230721技术公布日:2024/2/6本文地址:https://www.jishuxx.com/zhuanli/20240617/45470.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表