一种调节式灭火侦察机器人的制作方法
- 国知局
- 2024-07-05 17:00:01
本技术属于消防机器人,尤其涉及一种调节式灭火侦察机器人。
背景技术:
1、消防灭火侦察机器人,主要用于各领域火灾扑救、侦察,对提高救援安全性、减少人员伤亡具有重要意义。
2、消防灭火侦察机器人的消防炮,喷水的角度在调整过程中依靠连接臂架以及举升油缸进行高度的调整,由于地面、高层或者角落等都有可能会发生火灾(障碍物不确定性),在对起火位置进行确定后,需要调整车体的前进方向或者角度,来改变喷水口的朝向,使得使用时具备一定的局限性。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本实用新型提供一种调节式灭火侦察机器人,能够在不改变车体前进方向进行喷水管喷水朝向的调整,在实际的使用过程中操作更加灵活,适应更加复杂的灭火环境。
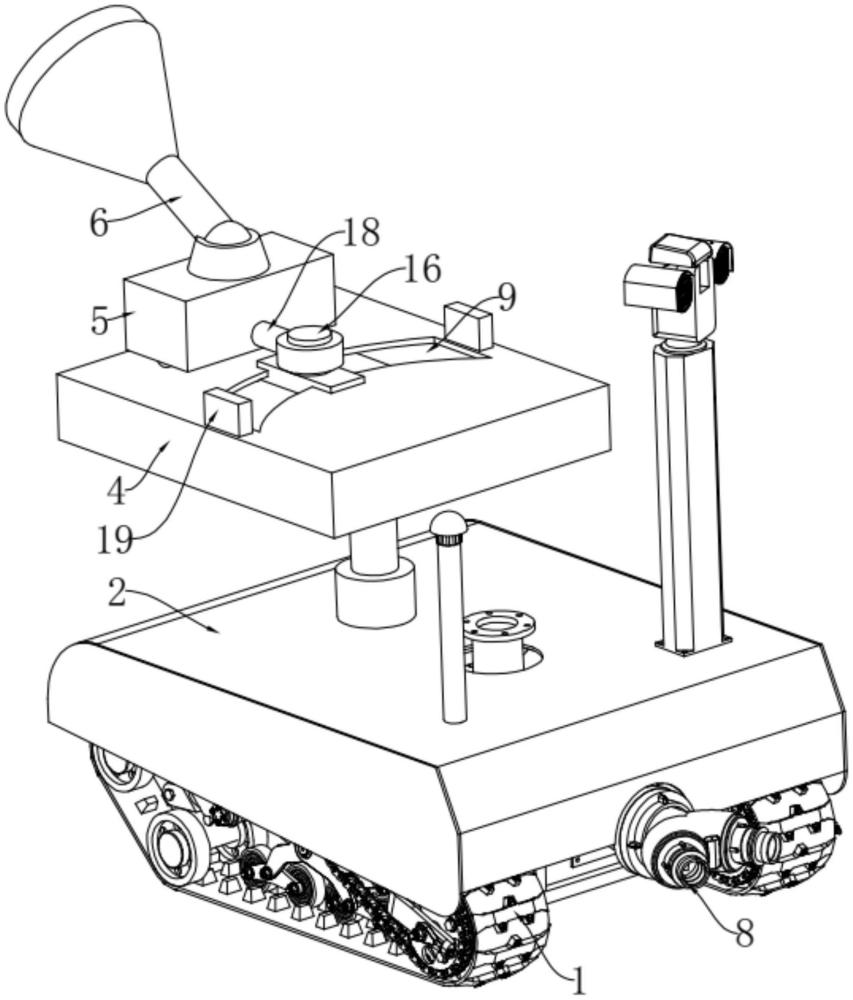
2、本实用新型采用的技术方案如下:一种调节式灭火侦察机器人,包括侦察机器人本体,所述侦察机器人本体的车架上设置调节式喷水装置,所述调节式喷水装置包括升降立柱和活动喷水灭火组件,所述升降立柱置于车架上前端,用于支撑所述装置的各个部件;所述升降立柱上设置支撑壳体,所述支撑壳体内部设置预定放置腔体,用于容纳驱动组件;所述活动喷水灭火组件置于支撑壳体上前端,并通过驱动组件在支撑壳体前端进行曲线位移;所述活动喷水灭火组件包括压力腔和喷管,所述压力腔置于支撑壳体上壁前端,用于喷水前的增压;所述压力腔底部装配滚珠,用于压力腔位移作业;所述喷管通过连接头置于压力腔的上端,随压力腔进行位移,并与压力腔管线连接。
3、进一步地,所述车架后端装配进水管接头,所述进水管接头穿过车架上壁与压力腔管线连接。
4、进一步地,所述车架上装配红外热像仪,用于热源的检测和跟踪。
5、进一步地,所述喷管前端外扩设置。
6、进一步地,所述机器人本体的行走机构采用履带式行走机构。
7、采用上述结构后,本实用新型有益效果如下:本实用新型提出的一种调节式灭火侦察机器人,通过设置的活动喷水灭火组件,利用驱动组件能够及时的调整喷管的喷水的朝向,配合车体前进方方向的调整,增加喷水角度调整的灵活性,更加适应不同的灭火环境;此外,压力腔随喷管同步改变角度,通过底部的滚珠进行平稳角度的调整,减少车体失重不平衡的几率。
技术特征:1.一种调节式灭火侦察机器人,包括侦察机器人本体,其特征在于,所述侦察机器人本体的车架上设置调节式喷水装置,所述调节式喷水装置包括:
2.根据权利要求1所述的一种调节式灭火侦察机器人,其特征在于:所述车架后端装配进水管接头,所述进水管接头穿过车架上壁与压力腔管线连接。
3.根据权利要求1所述的一种调节式灭火侦察机器人,其特征在于:所述车架上装配红外热像仪,用于热源的检测和跟踪。
4.根据权利要求1所述的一种调节式灭火侦察机器人,其特征在于:所述喷管前端外扩设置。
5.根据权利要求1所述的一种调节式灭火侦察机器人,其特征在于:所述机器人本体的行走机构采用履带式行走机构。
技术总结本技术公开的一种调节式灭火侦察机器人,包括侦察机器人本体,侦察机器人本体车架上设置调节式喷水装置,调节式喷水装置包括升降立柱和活动喷水灭火组件,升降立柱置于车架上前端;升降立柱上设置支撑壳体;活动喷水灭火组件置于支撑壳体上前端,并通过驱动组件在支撑壳体前端进行曲线位移;活动喷水灭火组件包括压力腔和喷管,压力腔置于支撑壳体上壁前端;压力腔底部装配滚珠;喷管通过连接头置于压力腔上端,随压力腔位移并与压力腔管线连接。本技术属于消防机器人技术领域,具体是一种能够在不改变车体前进方向进行喷水管喷水朝向的调整,在实际的使用过程中操作更加灵活,适应更加复杂的灭火环境的调节式灭火侦察机器人。技术研发人员:张利,李猛,鹿云海,杨文杰,季珂珂,孙胜利,任城钰,孙致富受保护的技术使用者:徐州鑫科机器人有限公司技术研发日:20230324技术公布日:2024/2/21本文地址:https://www.jishuxx.com/zhuanli/20240617/45835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表