消防栓接驳控制方法、装置、消防机器人以及存储介质与流程
- 国知局
- 2024-07-05 16:59:57
本公开涉及机器人,尤其涉及一种消防栓接驳控制方法、装置、消防机器人以及存储介质。
背景技术:
1、消防机器人是一种能够在火灾现场执行灭火、侦察、救援等任务的智能装备,可以代替或协助消防人员在危险的环境中进行救援作业,有效地保护消防人员的生命安全,提高救援效率和质量。目前,消防机器人与消防栓之间的接驳,需要消防员手动将消防机器人的消防水带接头与消防栓的消防水带接头进行接驳。当消防员未抵达火灾现场时,消防机器人无法进行自主灭火,制约了消防机器人的工作效率,带来财产的损失。
技术实现思路
1、有鉴于此,本发明要解决的一个技术问题是提供一种消防栓接驳控制方法、装置、消防机器人以及存储介质。
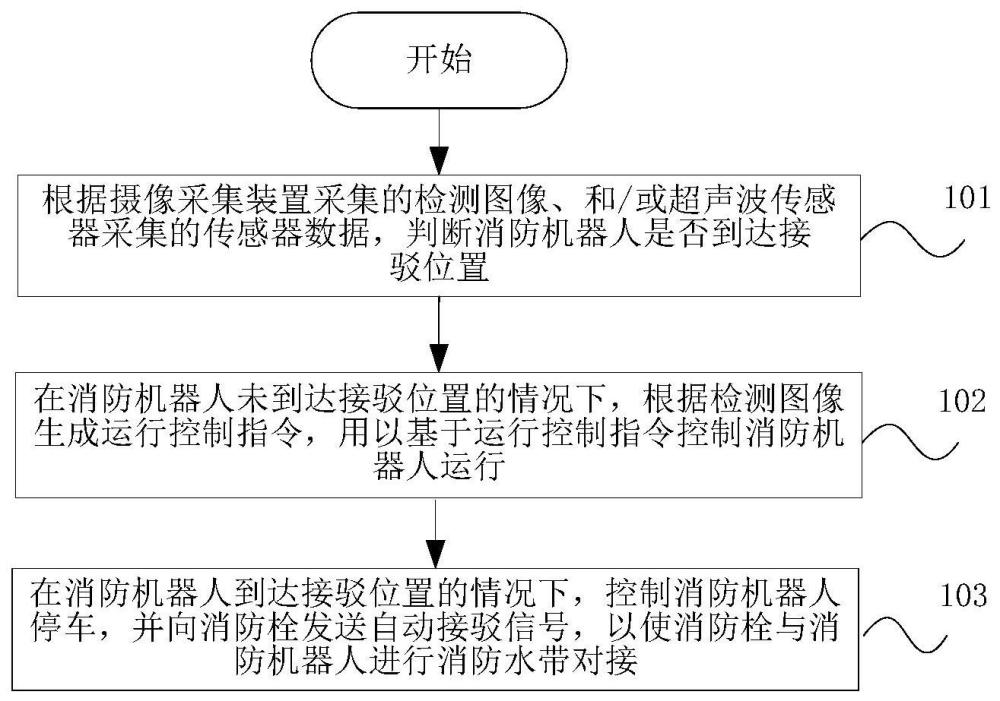
2、根据本公开的第一方面,提供一种消防栓接驳控制方法,包括:根据摄像采集装置采集的检测图像、和/或超声波传感器采集的传感器数据,判断消防机器人是否到达接驳位置;在所述消防机器人未到达所述接驳位置的情况下,根据所述检测图像生成运行控制指令,用以基于所述运行控制指令控制所述消防机器人运行;在所述消防机器人到达所述接驳位置的情况下,控制所述消防机器人停车,并向消防栓发送自动接驳信号,以使所述消防栓与所述消防机器人进行消防水带对接。
3、可选地,所述根据所述检测图像生成运行控制指令包括:从所述检测图像中提取地面标志线信息;基于所述地面标志线信息,确定运行控制参数;根据所述运行控制参数,生成所述运行控制指令。
4、可选地,所述运行控制参数包括:线速度和转向角度;所述基于所述地面标志线信息,确定运行控制参数包括:从所述地面标志线信息获取所述地面标志线的中心;确定所述地面标志线的中心在所述检测图像中的位置信息;根据所述位置信息以及所述检测图像,确定所述线速度和所述转向角度。
5、可选地,所述根据所述位置信息以及所述检测图像,确定所述线速度和所述转向角度包括:确定与所述检测图像相对应的坐标系;在所述坐标系中,基于所述位置信息确定第一坐标,并确定所述消防机器人的基准像素点的第二坐标;根据所述第二坐标和所述第一坐标的连线与所述坐标系的坐标轴之间的夹角,确定所述转向角度;计算所述第二坐标和所述第一坐标之间的距离,基于所述距离确定线速度的变化系数;根据所述消防机器人的当前线速度与所述变化系数,确定所述线速度。
6、可选地,在所述夹角大于转向角度阈值的情况下,确定所述转向角度为所述转向角度阈值;在所述线速度小于线速度阈值的情况下,确定所述线速度为所述线速度阈值。
7、可选地,所述根据摄像采集装置采集的检测图像、和/或超声波传感器采集的传感器数据,判断消防机器人是否到达接驳位置包括:在从所述检测图像中检测到接驳位置标志物,并且,确定所述接驳位置标志物的尺寸大于或等于第一大小阈值的情况下,和/或,在基于所述传感器数据确定的距离小于第一距离阈值的情况下,确定所述消防机器人到达所述接驳位置。
8、可选地,在从所述检测图像中检测到所述接驳位置标志物,并且,所述接驳位置标志物的尺寸大于或等于第二大小阈值的情况下,和/或,在基于所述传感器数据确定的距离小于第二距离阈值的情况下,基于第一减速系数控制所述消防机器人进行减速;其中,所述第二大小阈值小于所述第一距离阈值,所述第二距离阈值大于所述第一距离阈值。
9、可选地,根据所述消防机器人的速度调整级别的数量,在所述第二大小阈值和所述第一大小阈值之间设置各个速度调整级别的第三大小阈值,和/或,在所述第一距离阈值和所述第二距离阈值之间设置各个速度调整级别的第三距离阈值;设置各个速度调整级别的第二减速系数;在所述接驳位置标志物的尺寸大于或等于所述速度调整级别的第三大小阈值的情况下,和/或,在基于所述传感器数据确定的距离小于所述速度调整级别的第三距离阈值的情况下,基于此速度调整级别的第二减速系数控制所述消防机器人进行减速。
10、可选地,所述消防栓在控制所述消防水带与所述消防机器人对接完成后,发送接驳完成信息;所述方法还包括:在接收到所述接驳完成信息之后,控制所述消防机器人向远离所述消防栓的方向运行预设距离。
11、可选地,所述摄像采集装置和所述超声波传感器设置在所述消防机器人的尾部;所述方法还包括:基于所述运行控制指令控制所述消防机器人反向运行。
12、根据本公开的第二方面,提供一种消防栓接驳控制装置,包括:位置确定模块,用于根据摄像采集装置采集的检测图像、和/或超声波传感器采集的传感器数据,判断消防机器人是否到达接驳位置;运行控制模块,用于在所述消防机器人未到达所述接驳位置的情况下,根据所述检测图像生成运行控制指令,用以基于所述运行控制指令控制所述消防机器人运行;对接控制模块,用于在所述消防机器人到达所述接驳位置的情况下,控制所述消防机器人停车,并向消防栓发送自动接驳信号,以使所述消防栓与所述消防机器人进行消防水带对接。
13、根据本公开的第三方面,提供一种消防栓接驳控制装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器中的指令,执行如上所述的方法。
14、根据本公开的第四方面,提供一种消防机器人,包括:摄像采集装置、超声波传感器、如上所述的消防栓接驳控制装置、
15、根据本公开的第五方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述指令被处理器执行如上的方法。
16、本公开的消防栓接驳控制方法、装置、消防机器人以及存储介质,可以在接驳过程中引导消防机器人自主运行,可以对消防机器人的运动方向及速度进行精准控制,实现消防机器人与消防栓的自动接驳;提高了消防机器人的工作效率以及抢险救援效率和灵活性,减少对消防人员的依赖,降低火灾救援的风险和成本。
技术特征:1.一种消防栓接驳控制方法,包括:
2.如权利要求1所述的方法,其中,所述根据所述检测图像生成运行控制指令包括:
3.如权利要求2所述的方法,其中,所述运行控制参数包括:线速度和转向角度;所述基于所述地面标志线信息,确定运行控制参数包括:
4.如权利要求3所述的方法,其中,所述根据所述位置信息以及所述检测图像,确定所述线速度和所述转向角度包括:
5.如权利要求4所述的方法,其中,
6.如权利要求4所述的方法,其中,所述根据摄像采集装置采集的检测图像、和/或超声波传感器采集的传感器数据,判断消防机器人是否到达接驳位置包括:
7.如权利要求6所述的方法,其中,
8.如权利要求7所述的方法,还包括:
9.如权利要求1所述的方法,其中,所述消防栓在控制所述消防水带与所述消防机器人对接完成后,发送接驳完成信息;所述方法还包括:
10.如权利要求1至9任一项所述的方法,其中,所述摄像采集装置和所述超声波传感器设置在所述消防机器人的尾部;所述方法还包括:
11.一种消防栓接驳控制装置,包括:
12.一种消防栓接驳控制装置,包括:
13.一种消防机器人,包括:
14.一种计算机可读存储介质,所述计算机可读存储介质非暂时性地存储有计算机指令,所述指令被处理器执行如权利要求1至10中任一项所述的方法。
技术总结本公开提供了一种消防栓接驳控制方法、装置、消防机器人以及存储介质,涉及机器人技术领域,其中的方法包括:根据摄像采集装置采集的检测图像、和/或超声波传感器采集的传感器数据,判断消防机器人是否到达接驳位置;在消防机器人未到达接驳位置的情况下,根据检测图像生成运行控制指令,控制消防机器人运行;在消防机器人到达接驳位置的情况下,控制消防机器人停车,并向消防栓发送自动接驳信号。本公开可以在接驳过程中引导消防机器人自主运行,可以对消防机器人的运动方向及速度进行精准控制,实现消防机器人与消防栓的自动接驳;提高了消防机器人的工作效率以及抢险救援效率和灵活性,减少对消防人员的依赖,降低火灾救援的风险和成本。技术研发人员:倪辉,叶宾,张佳庆,张勇,张建华,赵琪,张云龙,刘睿受保护的技术使用者:徐工消防安全装备有限公司技术研发日:技术公布日:2024/2/21本文地址:https://www.jishuxx.com/zhuanli/20240617/45829.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。