破拆车辆、破拆车辆控制方法及存储介质与流程
- 国知局
- 2024-07-05 17:02:25
本公开涉及工程机械领域,尤其涉及一种破拆车辆、破拆车辆控制方法及存储介质。
背景技术:
1、随着经济社会快速发展,商场、仓库、工厂等封闭式建筑火灾突发概率和扑救难度越来越大。一旦发生火灾,消防人员很难突入火场施救。对比各消防厂家推出了具有强有力破拆和喷水灭火功能的强臂破拆消防车。该类型的消防车一般配有不同类型的破拆工具,如破拆钻、破拆锤、液压剪、抓木斗等。用户可根据不同介质选择不同破拆工具,完成对应的破拆作业。
2、相关技术中破拆车辆的大多破拆工具的取放及更换均为人为手动操作,破拆工具与快速切换接头的锁止要求要高配合度,破拆工具取放难度大,人工手动操作难以实现机具的快速、准确更换,严重影响消防救援效率。
技术实现思路
1、有鉴于此,本公开实施例提供一种破拆车辆、破拆车辆控制方法及存储介质,便于属具的取放。
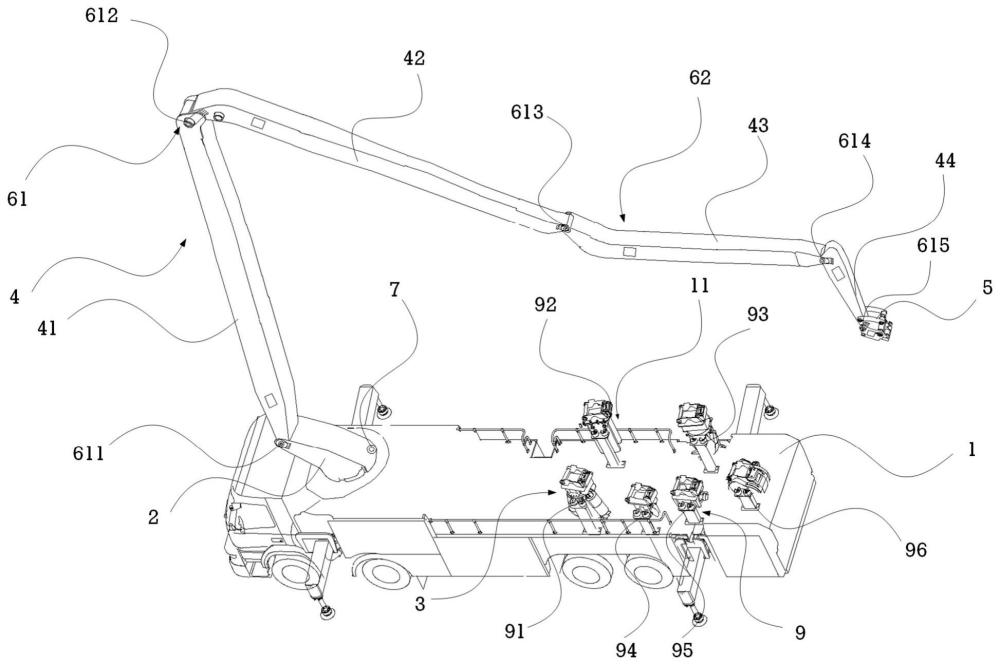
2、在本公开的一个方面,提供一种破拆车辆,包括:
3、底盘,底盘具有多个属具支架;
4、转台,可转动地设置于底盘;
5、多个属具,分别设置于多个属具支架;
6、臂架组件,与转台铰接,包括通过铰点依次连接的多节臂架;
7、属具接头,与多节臂架中的末节臂架的臂架末端铰接,用于拾取或放回多个属具中的任一属具;
8、多个铰点角度检测装置,分别与多节臂架中的各节臂架以及属具接头连接,被配置为检测各节臂架和属具接头的角度;
9、回转角度检测装置,与转台连接,被配置为检测转台相对于底盘的回转角度;和
10、处理器,与转台、臂架组件、属具接头、铰点角度检测装置和回转角度检测装置均信号连接,被配置为使转台、臂架组件和属具接头的角度分别调整至目标属具对应的臂架组件预设角度、属具接头预设角度和转台预设回转角度,以便属具接头拾取或放回目标属具。
11、在一些实施例中,破拆车辆还包括:
12、多个属具到位检测装置,分别设置于各个属具支架,被配置为检测各个属具是否位于对应的属具支架;
13、其中,处理器与各个属具到位检测装置均信号连接,被配置为响应于目标属具位于对应的属具支架,调整臂架组件、属具接头和转台的角度,以便属具接头拾取目标属具。
14、在一些实施例中,破拆车辆还包括:
15、多个重力式角度检测装置,分别与多节臂架中的各节臂架以及属具接头连接,被配置为检测各节臂架和属具接头的角度;
16、其中,处理器与各个重力式角度检测装置均信号连接,被配置为根据各个铰点角度检测装置和各个重力式角度检测装置获取的角度信息,确定臂架组件和属具接头的角度。
17、在本公开实施例的另一方面,提供一种基于上述任一的破拆车辆的破拆车辆控制方法,包括:
18、通过铰点角度检测装置和回转角度检测装置分别获取臂架组件的各节臂架、属具接头和转台的角度信息;
19、使转台调整至目标属具对应的转台预设回转角度,使臂架组件的各节臂架分别调整至目标属具对应的各节臂架预设角度,以及使属具接头调整至目标属具对应的属具接头预设角度;
20、响应于转台、臂架组件的各节臂架和属具接头均到达目标属具对应的预设姿态,使属具接头拾取或放回目标属具。
21、在一些实施例中,使转台调整至目标属具对应的转台预设回转角度,使臂架组件的各节臂架分别调整至目标属具对应的各节臂架预设角度,以及使属具接头调整至目标属具对应的属具接头预设角度的操作具体包括:
22、依次将转台的角度调整至目标属具对应的转台预设回转角度允许范围内、将臂架组件的各节臂架的角度调整至目标属具对应的各节臂架预设角度允许范围内,以及将属具接头的角度调整至目标属具对应的属具接头预设角度允许范围内。
23、在一些实施例中,破拆车辆控制方法还包括:
24、以转台的回转中心为坐标原点建立坐标系;
25、根据目标属具与底盘的距离、目标属具与坐标原点的距离以及目标属具与坐标原点的偏角,确定目标属具的卡接端点的位置坐标,以及根据臂架组件的首节臂架与坐标原点的距离、臂架组件各节臂架的长度、属具接头的长度、臂架组件的各节臂架的角度、属具接头的角度和转台的角度,确定属具接头的操作端点的位置坐标;
26、响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内。
27、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作具体包括:
28、响应于属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值大于距离差值允许范围的最大值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
29、调整臂架组件及属具接头中角度差值最大的臂架或属具接头,使角度差值最大的臂架或属具接头的角度差值减小,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值小于距离差值允许范围的最大值。
30、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
31、响应于属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值小于距离差值允许范围的最小值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
32、调整臂架组件及属具接头中角度差值最小的臂架或属具接头,使角度差值最小的臂架或属具接头的角度差值增大,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值大于距离差值允许范围的最小值。
33、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
34、响应于将臂架组件中角度差值最大的臂架的角度差调整至等于臂架预设角度允许范围的最小值,或将属具接头的角度调整至等于属具接头预设角度允许范围的最小值时,属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值仍大于距离差值允许范围的最大值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
35、调整臂架组件及属具接头中角度差值最大的臂架或属具接头,使角度差值最大的臂架或属具接头的角度差值减小,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值小于距离差值允许范围的最大值。
36、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
37、响应于将臂架组件中角度差值最小的臂架的角度差调整至等于臂架预设角度允许范围的最大值,或将属具接头的角度调整至等于属具接头预设角度允许范围的最大值时,属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值仍小于距离差值允许范围的最小值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
38、调整臂架组件及属具接头中角度差值最小的臂架或属具接头,使角度差值最小的臂架或属具接头的角度差值增大,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的距离差值大于距离差值允许范围的最小值。
39、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
40、响应于属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值大于高度夹角差值允许范围的最大值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
41、调整臂架组件及属具接头中角度差值最大的臂架或属具接头,使角度差值最大的臂架或属具接头的角度差值减小,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值小于高度夹角差值允许范围的最大值。
42、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
43、响应于属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值小于高度夹角差值允许范围的最小值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
44、调整臂架组件及属具接头中角度差值最小的臂架或属具接头,使角度差值最小的臂架或属具接头的角度差值增大,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值大于高度夹角差值允许范围的最小值。
45、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
46、响应于将臂架组件中角度差值最大的臂架的角度差调整至等于臂架预设角度允许范围的最小值,或将属具接头的角度调整至等于属具接头预设角度允许范围的最小值时,属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值仍大于高度夹角差值允许范围的最大值,分别比较臂架组件中各节臂架的实际角度与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
47、调整臂架组件及属具接头中角度差值最大的臂架或属具接头,使角度差值最大的臂架或属具接头的角度差值减小直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值小于高度夹角差值允许范围的最大值。
48、在一些实施例中,响应于属具接头的操作端点与目标属具的卡接端点的位置差值超出位置差值允许范围,调整臂架组件和/或属具接头以将属具接头的操作端点与目标属具的卡接端点的位置差值调整至位置差值允许范围内的操作还包括:
49、响应于将臂架组件中角度差值最小的臂架的角度差调整至等于臂架预设角度允许范围的最大值,或将属具接头的角度调整至等于属具接头预设角度允许范围的最大值时,属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值仍小于高度夹角差值允许范围的最小值,比较臂架组件中各节臂架的实际角度分别与目标属具对应的各节臂架预设角度的差值,以及属具接头的实际角度与目标属具对应的属具接头预设角度的差值;
50、调整臂架组件及属具接头中角度差值最小的臂架或属具接头,使角度差值最小的臂架或属具接头的角度差值增大,直到属具接头的操作端点的球坐标与目标属具的卡接端点的球坐标的高度夹角差值大于高度夹角差值允许范围的最小值。
51、在一些实施例中,响应于转台、臂架组件的各节臂架和属具接头均到达目标属具对应的预设姿态,使属具接头拾取目标属具的操作具体包括:
52、使属具接头的操作端点移动至第一预设位置;
53、转动属具接头,使属具接头的操作端点移动至第二预设位置与目标属具的卡接端点重合,以便属具接头锁止目标属具。
54、在一些实施例中,响应于转台、臂架组件的各节臂架和属具接头均到达目标属具对应的预设姿态,使属具接头拾取目标属具的操作还包括:
55、响应于属具接头的操作端点到达第二预设位置与目标属具的卡接端点重合,通过使臂架组件的末节臂架升起和/或臂架组件的倒数第二节臂架下落以将目标属具竖直提出,直到目标属具的卡接端点的高度大于第一预设高度。
56、在一些实施例中,响应于转台、臂架组件和属具接头到达目标属具对应的预设姿态,使属具接头放回目标属具的操作具体包括:
57、使属具接头的操作端点移动至第二预设位置与目标属具的卡接端点重合,以使属具接头解锁目标属具;
58、转动属具接头,使属具接头的操作端点移动至第一预设位置。
59、在一些实施例中,响应于转台、臂架组件和属具接头到达目标属具对应的预设姿态,使属具接头放回目标属具的操作还包括:
60、响应于目标属具的卡接端点的高度大于第一预设高度,通过使臂架组件的末节臂架升起和/或臂架组件的倒数第二节臂架下落,以将目标属具竖直放回,以使属具接头的操作端点到达第二预设位置与目标属具的卡接端点重合。
61、在一些实施例中,破拆车辆还包括:
62、多个属具到位检测装置,分别设置于多个属具支架,被配置为检测各属具是否位于对应的属具支架;
63、其中,破拆车辆控制方法还包括:
64、响应于通过属具到位检测装置确定目标属具位于属具支架,调整臂架组件、属具接头和/或转台的角度,以便属具接头拾取目标属具。
65、在一些实施例中,破拆车辆控制方法还包括:
66、使转台调整至目标属具对应的转台预设回转角度、使臂架组件的各节臂架分别调整至目标属具对应的各节臂架预设角度以及使属具接头调整至目标属具对应的属具接头预设角度前,响应于目标属具位于属具支架,起升属具接头,使属具接头的高度大于第二预设高度,以便属具接头拾取目标属具。
67、在一些实施例中,破拆车辆控制方法还包括:
68、响应于通过属具到位检测装置确定目标属具对应的属具支架处于空置状态,且属具接头的高度大于第一预设高度,调整臂架组件、属具接头和/或转台的角度,以便属具接头将目标属具放回。
69、在本公开的又一方面,提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述任一项的破拆车辆控制方法。
70、因此,根据本公开实施例,通过对臂架组件、转台和属具接头的角度进行检测定位,并给出取放每个属具时臂架组件、转台和属具接头分别应处于的预设姿态,以使属具接头的操作端点能够根据臂架组件、转台和属具接头的姿态切换到便于拾取或放下目标属具的位置,满足属具接头与属具的高锁止配合和拆卸要求,省去人工手动操作取放属具花费找准定位所需的大量时间,可以实现不同属具的快速取放更换,且相比于人工操作能够实现更精准的定位和取放,有助于提高救援效率,实现高效可靠的救援。
本文地址:https://www.jishuxx.com/zhuanli/20240617/46069.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表