一种爬梯型消防巡检机器人的制作方法
- 国知局
- 2024-07-05 17:09:06
本技术涉及消防巡检智能机械领域,具体涉及一种爬梯型消防巡检机器人 。
背景技术:
1、消防巡检机器人是一种应用于消防安全领域的机器人设备,具有以下主要功能:火灾检测(消防巡检机器人可以配备火灾监测设备,如烟雾探测器、红外线探测器等,实时监测火灾风险,及时发现火灾隐患)、环境监测(消防巡检机器人可以配备环境监测设备,如温度计、湿度计、气体检测仪等,监测环境温度、湿度、气体浓度等参数,及时发现异常情况)、巡检巡查(消防巡检机器人可以自主巡检消防设施,如消火栓、灭火器、喷淋系统等,检查设施是否完好,及时发现故障和损坏)、通信联动(消防巡检机器人可以与消防指挥中心进行通信联动,及时向指挥中心汇报火灾和异常情况,协助指挥中心调度消防力量)、数据分析(消防巡检机器人可以将收集到的数据进行分析和处理,生成消防安全报告,为消防安全管理提供数据支持)。随着科技生活的不断发展,消防巡检机器人的运用也越来越为广泛。
2、现有技术中常见的消防巡检机器人在面对如楼梯等带有一定高度落差的情况时,无法及时进行调整,进而造成巡检中断。
技术实现思路
1、实用新型目的:提供一种爬梯型消防巡检机器人,以解决现有技术存在的上述问题。
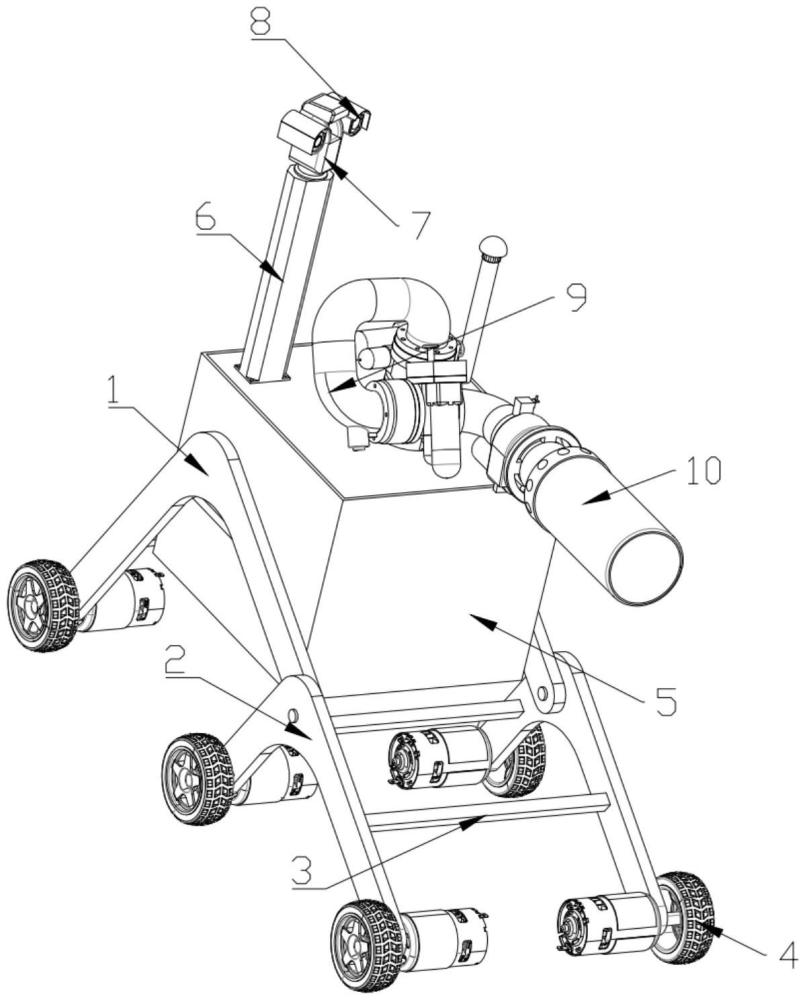
2、技术方案:一种爬梯型消防巡检机器人,包括支撑爬梯组件和巡检组件两个部分。所述支撑爬梯组件包括具有预定支撑力,可进行相应支撑与限位作业的支架单元;与所述支架单元相连,可进行相应移动调节作业的滚轮单元。所述巡检组件包括与所述支架单元相连,可进行相应承载限位作业的基板;置于所述基板作业面表面的消防巡检单元。
3、在进一步的实施例中,所述支架单元包括定位柱、调节柱和连通柱三个组成部分。所述定位柱具有预定的作业长度与弯折弧度,可进行相应的承载与限位作业,且所述定位柱为多个;所述调节柱与所述定位柱转动连接,可绕与所述定位柱的连接点进行预定范围内的转动调节作业,且所述调节柱为多个;所述连通柱具有预定的作业长度与支撑力,用于多个所述定位柱与多个所述调节柱之间的相互连通。
4、在进一步的实施例中,所述滚轮单元包括转动轴和滚轮两个组成部分。所述转动轴与所述支架单元转动连接,可在相应马达的驱动下绕与所述支架单元的连接点进行全方位转动作业;所述滚轮与所述转动轴相连,可跟随所述转动轴的转动调节而转动。
5、在进一步的实施例中,所述消防巡检单元包括实时检测组合紧急喷淋组两个组成部分。所述实时检测组置于所述基板的作业面表面,具有预定的作业高度,可进行预定范围内的检测作业;所述紧急喷淋组置于所述基板的作业面表面,并与所述实时检测组之间留有预定的作业距离,可进行相应的应急喷淋作业。
6、在进一步的实施例中,所述实时检测组包括立柱、旋转盘和感应检测摄像头三个组成部分。所述立柱置于所述基板的作业面表面,并具有预定的作业高度与支撑力,可进行相应的限位固定作业;所述旋转盘与所述立柱转动连接,可绕与所述立柱的连接点进行全方位转动作业,可进行相应的方向作业;所述感应检测摄像头与所述旋转盘相连,可跟随所述旋转盘的转动而进行相应作业方向的调节。
7、在进一步的实施例中,所述紧急喷淋组包括输送管和喷淋头两个组成部分。所述输送管置于所述基板的作业面表面,并与所述实时检测组之间留有预定的作业距离,外接有相应的储水箱,可将所述储水箱内所储存的水液进行输送;所述喷淋头与所述输送管相连通,可将经由所述输送管输送的水液进行增压喷淋作业。
8、有益效果:本实用新型涉及一种爬梯型消防巡检机器人,涉及消防巡检智能机械领域,包括支撑爬梯组件和巡检组件两个部分。支撑爬梯组件包括具有预定支撑力,可进行相应支撑与限位作业的支架单元;与所述支架单元相连,可进行相应移动调节作业的滚轮单元。巡检组件包括与所述支架单元相连,可进行相应承载限位作业的基板;置于所述基板作业面表面的消防巡检单元。本申请中所设的支撑爬梯组件可自动调节作业滚轮之间的作业高度与支撑点,进而可实现自主爬梯作业,以适应不同的应用场景,提高消防巡检的质量,并扩展了巡检机器人的运用场景。
技术特征:1.一种爬梯型消防巡检机器人,其特征在于包括:
2.根据权利要求1所述的一种爬梯型消防巡检机器人,其特征在于,所述支架单元包括:
3.根据权利要求1所述的一种爬梯型消防巡检机器人,其特征在于,所述滚轮单元包括:
4.根据权利要求2所述的一种爬梯型消防巡检机器人,其特征在于,所述消防巡检单元包括:
5.根据权利要求4所述的一种爬梯型消防巡检机器人,其特征在于,所述实时检测组包括:
6.根据权利要求4所述的一种爬梯型消防巡检机器人,其特征在于,所述紧急喷淋组包括:
技术总结本技术涉及一种爬梯型消防巡检机器人,涉及消防巡检智能机械领域,包括支撑爬梯组件和巡检组件两个部分。支撑爬梯组件包括具有预定支撑力,可进行相应支撑与限位作业的支架单元;与所述支架单元相连,可进行相应移动调节作业的滚轮单元。巡检组件包括与所述支架单元相连,可进行相应承载限位作业的基板;置于所述基板作业面表面的消防巡检单元。本申请中所设的支撑爬梯组件可自动调节作业滚轮之间的作业高度与支撑点,进而可实现自主爬梯作业,以适应不同的应用场景,提高消防巡检的质量,并扩展了巡检机器人的运用场景。技术研发人员:张利,季珂珂,鹿云海受保护的技术使用者:徐州鑫科机器人有限公司技术研发日:20230703技术公布日:2024/4/7本文地址:https://www.jishuxx.com/zhuanli/20240617/46835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表