一种输电杆塔高空作业攀登防坠装置及其使用方法与流程
- 国知局
- 2024-07-05 17:09:46
本发明提供一种输电杆塔高空作业攀登防坠装置及其使用方法,属于输电杆塔高空作业攀登防坠。
背景技术:
1、近年来随着电网建设规模的不断扩大,高电压等级输电线路的建设数量也在逐年增加,随着高电压输电线路建设杆塔的高度越来越高,使得维护人员在攀登杆塔时的难度也越来越大。
2、维护人员在攀登高压输电杆塔时可能会由于体力下降、注意力不集中、脚钉松动等原因引发坠落的安全事故,目前主要采用登塔防坠轨道来避免事故的发生,但设置的防坠轨道同时存在操作不方便、安装成本高、年久失效等问题,不能为人员登塔提供便捷可靠的后备保护。
技术实现思路
1、本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种输电杆塔高空作业攀登防坠装置结构及其使用方法的改进。
2、为了解决上述技术问题,本发明采用的技术方案为:一种输电杆塔高空作业攀登防坠装置,包括悬挂在输电杆塔顶部角钢上的保护挂架,所述保护挂架具体为由上边框、侧边框、下边框组成的c形挂架;
3、在保护挂架上边框的内侧上下相对安装有滑轨和开口槽,在滑轨上垂直安装有牵引杆,所述牵引杆的底部从开口槽伸出,在牵引杆的顶部设置有能够在滑轨上滑动的滚轮,所述牵引杆上还设置有弧形凹槽,所述弧形凹槽与钢索的一端套接固定,在牵引杆的底部设置有角钢卡具;
4、在保护挂架侧边框的内侧沿垂直排列设置有多个圆柱形的限位器,各限位器的一端通过转动轴与保护挂架连接固定,各限位器的另一端搭接在半圆形的可转动导轨上,所述钢索的另一端沿各限位器向下延伸与钢索滚轴相连;
5、所述保护挂架侧边框的内侧还设置有牵引绳槽,在牵引绳槽的中心壁上安装有旋转轴承,在牵引绳槽外侧设置有盖板,在旋转轴承上活动安装有手动盘线器,通过旋转手动盘线器能够将牵引绳缠到手动盘线器上;
6、所述保护挂架下边框底部的两侧预留有用于穿出牵引绳两端的挂架绳孔,所述牵引绳伸出保护挂架的两端分别绑接有防坠绳;
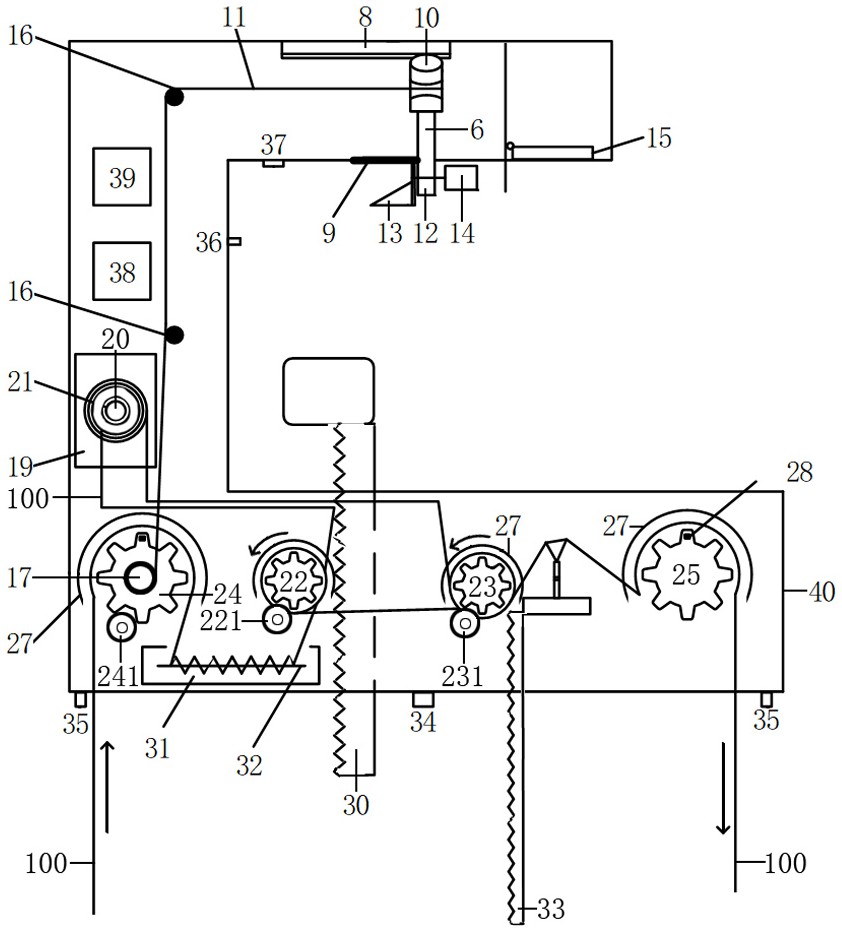
7、在保护挂架的下边框中设置有能够打开的滚轮盒,在滚轮盒的内部按顺序水平安装有第一防坠滚轴、第一功能滚轴、第二功能滚轴、第二防坠滚轴,在各滚轴上均安装有阻尼液压的防滑齿轮,在各滚轴的上方均设置有滚轴槽,通过设置相应的液压装置能够控制各滚轴上下运动,通过控制液压装置加紧使得相应滚轴能够将牵引绳压入滚轴槽中并固定,通过控制液压装置放松使得牵引绳能够在各滚轴上滑动,各滚轴还由电机驱动能够实现正反向转动和制动;
8、在第一防坠滚轴和第二防坠滚轴的轴承上还安装有第一压力传感器;
9、所述钢索滚轴与第一防坠滚轴同轴设置,所述第一防坠滚轴的防滑齿轮通过活动设置的第一齿轮螺杆进行传动,并通过第一齿轮螺杆驱动钢索滚轴滚动,使钢索滚轴能够拉动钢索;
10、所述第一功能滚轴的防滑齿轮通过活动设置的第二齿轮螺杆进行传动,并通过第二齿轮螺杆驱动另一侧设置的角钢支撑杆上下运动,使角钢支撑杆能够抵在保护挂架上边框的底部;
11、所述第二功能滚轴的防滑齿轮通过活动设置的第三齿轮螺杆进行传动,并通过第三齿轮螺杆驱动另一侧设置的绳索支撑杆上下运动,使绳索支撑杆能够抵在保护挂架上边框的底部;
12、所述第一齿轮螺杆、第二齿轮螺杆、第三齿轮螺杆还通过设置电磁式换位拨片切换传动位与非传动位;
13、所述保护挂架侧边框的内部还设置有用于控制拍摄测距以及驱动电机的计算控制通信单元,以及为计算控制通信单元供电的锂电池电源。
14、所述保护挂架能够通过无人机吊起,所述无人机具体通过铰链与保护挂架连接固定,所述铰链的上端挂接在无人机的支架上,所述铰链的下端设置有脱钩装置;
15、在保护挂架上边框的中部设置有垂直的贯穿孔,在贯穿孔内部设置有固定圆管,所述脱钩装置穿过固定圆管后通过支撑脚架卡在固定圆管底部的通孔处;
16、所述脱钩装置上还设置有电磁脱钩器,所述电磁脱钩器具体通过连接扣环与连接绳的一端相连,所述连接绳的另一端与支撑脚架的中部连接固定。
17、所述角钢卡具朝向保护挂架侧边框的一侧安装有楔形卡具,所述楔形卡具的外侧通过转轴与卡具电机相连,所述卡具电机能够驱动楔形卡具沿转轴方向旋转。
18、在保护挂架上边框的延伸端还设置有卡线盒,在卡线盒的底部开设有进线窗,在进线窗的一侧活动设置有闭锁销;
19、所述绳索支撑杆的顶部具体设置为能够顶起牵引绳的y形,在绳索支撑杆的顶部还设置有旋转电机;
20、所述绳索支撑杆能够将牵引绳顶入卡线盒中,并由闭锁销将顶入的牵引绳固定在卡线盒中。
21、在第一功能滚轴与第一防坠滚轴之间还设置有用于盘起牵引绳的线缆槽,所述线缆槽内部还设置有由电机驱动的盘线滚轮。
22、所述保护挂架下边框的底部设置有图像拍摄装置、第一激光测距装置;
23、在保护挂架侧边框的内侧还设置有第二激光测距装置;
24、在保护挂架上边框的底部还设置有第二压力传感器;
25、所述计算控制通信单元通过导线分别与图像拍摄装置、第一激光测距装置、第二激光测距装置、第一压力传感器、第二压力传感器以及各电机的控制端相连。
26、一种输电杆塔高空作业攀登防坠装置使用方法,包括如下的使用步骤:
27、步骤一:操作人员首先在地面调试保护挂架,具体将第一齿轮螺杆、第二齿轮螺杆、第三齿轮螺杆均置于非传动位;
28、步骤二:打开保护挂架内部牵引绳槽的盖板和滚轮盒,将手动盘线器插入到旋转轴承上,再将牵引绳依次缠绕在第一防坠滚轴、盘线滚轮、第一功能滚轴、旋转轴承、第二功能滚轴、第二防坠滚轴上,并将牵引绳的两端分别从保护挂架下边框底部两侧设置的挂架绳孔中引出;
29、转动手动盘线器,控制第一功能滚轴、第二功能滚轴制动,将牵引绳缠绕到手动盘线器上,牵引绳盘紧后,盖上牵引绳槽的盖板和滚轮盒的盖板,取下手动盘线器,在引出的牵引绳的两端加挂配重块;此时控制各滚轴制动,相应的液压装置加紧;
30、步骤三:控制无人机上电,控制无人机吊起保护挂架,将脱钩装置穿过保护挂架,打开支撑脚架,安装连接扣环与电磁脱钩器;
31、步骤四:当第二压力传感器检测受力大于设定阈值时,控制第一功能滚轴和第二功能滚轴的液压装置放松,同时控制第二防坠滚轴转动,使外侧配重块随牵引绳下降,到达地面后,人员取下配重块,固定牵引绳;然后控制第二防坠滚轴制动,第一防坠滚轴转动,待内侧配重块到达地面后,人员将牵引绳槽内所有牵引绳拉出;
32、步骤五:将牵引绳的一端与防坠绳连接,由人员牵引外侧牵引绳,待牵引绳全部替换为防坠绳后,取下牵引绳;控制第一齿轮螺杆置于传动位,人员拉动外侧防坠绳,带动第一防坠滚轴转动牵引钢索,进而带动角钢卡具卡紧角钢;
33、步骤六:待角钢卡具卡紧角钢后,制动第一防坠滚轴,控制第一功能滚轴置于传动位,并加紧液压装置,将盘线滚轮移出线缆槽,人员牵引外侧防坠绳,随第一功能滚轴转动,带动角钢支撑杆向上运动,待角钢支撑杆与角钢接触后,放松第一功能滚轴的防滑齿轮,人员继续牵引外侧防坠绳,并将剩余防坠绳从线缆槽内抽出,再控制各滚轴的液压装置加紧;
34、然后将防坠绳两端固定在角钢安装侧的杆塔塔脚,对外侧防坠绳安装速差防坠器,完成高空人身安全后备保护装置的部署,并在作业完成后进行拆卸回收。
35、所述步骤三控制无人机吊起保护挂架时具体采用自主悬挂模式,对目标线路进行三维点云建模,并在此基础上规范自主作业路径,具体方法为:
36、控制无人机依规划的线路自主起飞,飞到起始点作业位置后,切换控制方式,由计算控制通信单元控制无人机;
37、控制保护挂架下方设置的图像拍摄装置拍摄图像,若拍摄图像中的内角钢图像占整个图像尺寸小于20%,同时位于左右两侧的第一激光测距装置、第二激光测距装置测得距离大于1.5m,则确认无人机处在作业起始位置,无人机则自动向下降落;
38、如果不满足上述条件,则控制无人机水平或前后移动,直到满足条件,即可向下移动;
39、当第二激光测距装置检测距离为20-35cm时,无人机沿顺线路方向往远离杆塔的方向飞行;
40、当第二激光测距装置检测距离为0时,则控制无人机停止飞行,释放电磁脱钩器,使铰链与保护挂架分离,使无人机飞离,并沿规划航线降落,完成自主悬挂。
41、所述步骤六中对保护挂架进行拆卸回收的具体方法为:
42、作业完成后,人员松开固定在杆塔塔脚的防坠绳,松开第一功能滚轴、第一防坠滚轴、第二防坠滚轴的防滑齿轮,将第三齿轮螺杆置于传动位置;
43、人员拉动外侧防坠绳,带动绳索支撑杆向上运动,使绳索支撑杆的y形顶部将防坠绳顶入卡线盒中固定,并控制绳索支撑杆的y形顶部旋转;由地面人员拉动外侧防坠绳,控制绳索支撑杆下降,而防坠绳则被闭锁在卡线盒内,完成对防坠绳的闭锁;
44、然后控制各滚轴的液压装置加紧,拉动内侧防坠绳,收回角钢支撑杆,放松角钢卡具,控制卡具电机使楔形卡具旋转,同时控制可转动导轨旋转,使限位器下垂,失去限位功能;
45、人员拉动外侧防坠绳,将钢索从保护挂架侧边框中拉出并向外推动角钢,使角钢脱离工作位置,使保护挂架逆时针倾倒,悬挂在防坠绳上;
46、最后由人员逐步放松防坠绳,使保护挂架随防坠绳落到地面,完成装置的拆卸。
47、所述步骤三中控制无人机飞到的起始点作业位置具体为:
48、横线路方向位置为杆塔中心偏脚钉安装侧第二根与第三根斜材处,顺线路方向位置为上横担脚钉安装侧向对侧20-25cm处,高度为上横担高2m处。
49、本发明相对于现有技术具备的有益效果为:本发明提供的输电杆塔高空作业攀登防坠装置能够确保高空登杆人员的人身安全,该装置具体为一种保护挂架,并在挂架上设置有图像传感器、压力传感器、激光测距装置、控制器等单元,通过无人机将整个挂架快速部署至杆塔高处,通过从挂架内部延伸出防坠绳,为高空作业人员在登杆时提供后备保护,避免人员登塔因缺少后备保护、或保护失效带来的安全风险;防坠装置同时采用航线规划与多传感器定位结合的作业路径自主判断方式,避免出线航线误差,使整个搭挂防坠绳的过程不需要人工操作,提升了作业的效率,即使在视线不清楚的条件下,依然能够完成作业;同时在对装置进行拆卸时,可实现装置自主脱离,免除了无人机对接和运输操作,显著提升了作业效率。
本文地址:https://www.jishuxx.com/zhuanli/20240617/46912.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表