储能舱室的灭火排气机器人、灭火防爆方法及控制系统与流程
- 国知局
- 2024-07-05 17:09:50
本申请属于储能电站领域,具体地涉及储能舱室的灭火排气机器人、灭火防爆方法及控制系统。
背景技术:
1、电力系统中新能源的占比大幅提高,而例如风能、光伏等新能源的波动性和随机性较大,因此需要大规模的储能设备来保证能源的稳定供应。近年来,锂电池储能系统得到了迅速发展。然而,随着锂电池储能电站数量的增多,锂电池储能电站火灾爆炸事故也频繁发生。由于mwh级别的锂电池储能系统的能量达到10gj以上,一旦发生火灾,灭火过程极其困难,将会造成人员伤亡和重大财产损失。目前大型火灾事故的消防灭火任务主要还是依赖消防员到达现场进行人工灭火,然而锂电池储能舱室的火灾演化复杂,锂电池热失控放出的大量可燃气体导致储能舱室随时存在爆炸风险,消防员的生命安全得不到保障。
技术实现思路
1、本申请的目的是提供一种储能舱室的灭火排气机器人、灭火防爆方法及控制系统,用于解决电池储能舱室的灭火防爆问题,达到远程灭火、排气防爆、降低电池热失控风险和减少储能舱室爆炸风险的效果。
2、为了实现上述目的,本申请一方面提供一种储能舱室的灭火排气机器人,包括:
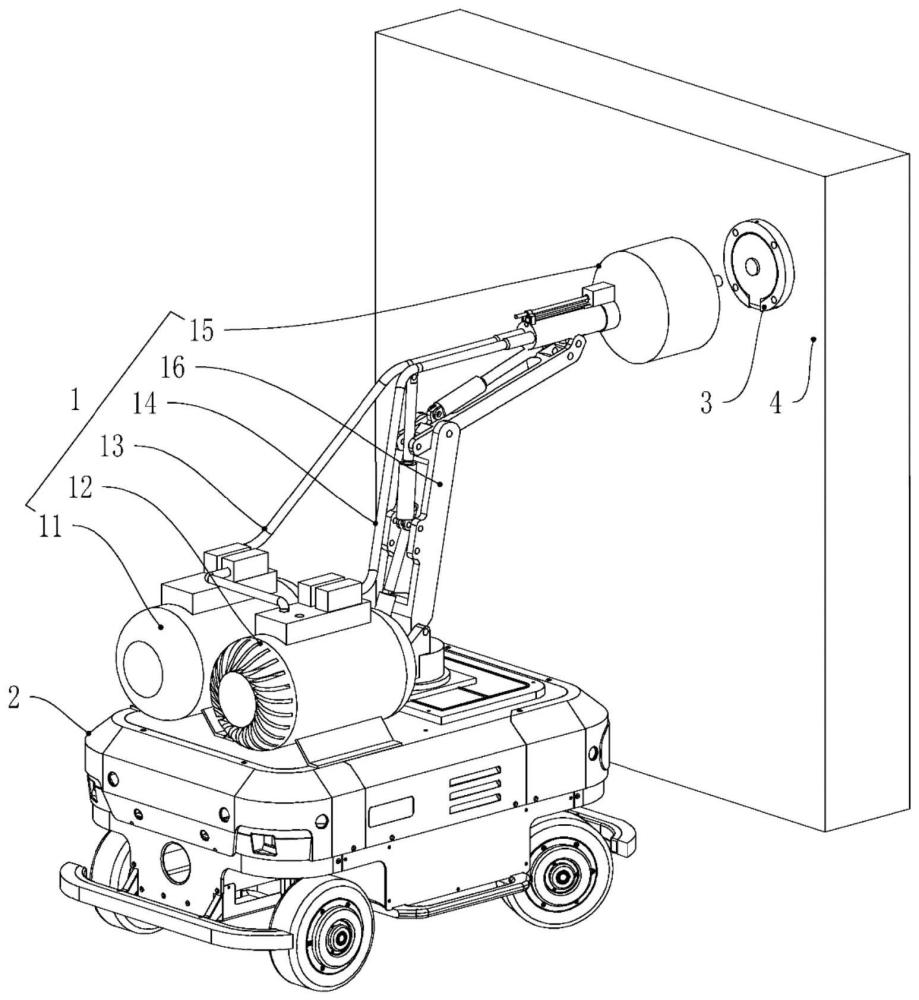
3、灭火排气作业装置,设有储气罐、排气泵、进气管、排气管和作业末端;所述进气管的头端与所述储气罐连接,尾端与所述作业末端连接;所述排气管的头端与所述排气泵连接,尾端与所述作业末端连接;所述作业末端用于使所述进气管和所述排气管对准所述储能舱室的灭火孔;
4、移动装置,用于承载并移动所述灭火排气作业装置。
5、在一些实施方式中,所述灭火排气作业装置还包括用于调整所述作业末端位置的机械臂;所述机械臂的固定端安装在所述移动装置上,所述机械臂的执行端连接所述作业末端。
6、在一些实施方式中,所述作业末端包括用于罩设所述储能舱室的灭火孔的密封罩;所述进气管的尾端和所述排气管的尾端穿过所述密封罩。
7、在一些实施方式中,所述作业末端包括用于识别所述储能舱室的灭火孔位置的视觉相机。
8、在一些实施方式中,所述储能舱室的灭火孔上设有孔盖组件,所述孔盖组件包括筒体、盖板、弹性铰链、弹性插销和弹性按钮;所述筒体嵌入所述灭火孔内;所述盖板通过所述弹性铰链铰接于所述筒体的端部;所述弹性按钮推动所述弹性插销解锁,使所述盖板在所述弹性铰链的带动下自动翻转,打开所述筒体的端部开口。
9、在一些实施方式中,所述作业末端包括推杆组件和按钮压杆;所述推杆组件的固定端安装在所述机械臂的执行端,所述推杆组件的执行端连接所述按钮压杆;所述按钮压杆用于推动所述弹性按钮,使所述盖板能够自动翻转打开。
10、在一些实施方式中,其特征在于,所述移动装置为轮式移动底盘,所述轮式移动底盘上安装有用于导航定位的激光雷达、导航摄像头、超声波传感器中的至少一种。
11、本申请另一方面提供一种储能舱室的灭火防爆方法,采用上述的灭火排气机器人,包括以下步骤:
12、向灭火排气机器人发送灭火指令,灭火排气机器人到达目标位置;
13、灭火排气机器人通过其作业末端将进气管和排气管对准储能舱室的灭火孔,打开灭火排气机器人的储气罐的阀体,使其储存的液态气体灭火剂经进气管进入储能舱室的内部;
14、获取储能舱室内部的电池状态数据和可燃气体体积,将其输入预测模型;
15、根据预测得到的电池内部温度和可燃气体体积,控制储气罐的注入流量和排气泵的排出流量。
16、在一些实施方式中,当储能舱室发生火灾时,启动灭火排气机器人,向灭火排气机器人发送包括目标位置信息的灭火指令;灭火排气机器人收到灭火指令后,自动规划出一条到达目标位置的最短路径并生成目标轨迹,然后跟随目标轨迹运动,到达目标位置后停止。
17、在一些实施方式中,通过储能舱室的电池管理系统直接获得电池电压、电池电流和电池表面温度,并利用电热耦合模型计算,进一步获得电池内部温度和电池荷电状态;通过储能舱室内部的可燃气体传感器获得其可燃气体体积。
18、在一些实施方式中,所述电池状态数据包括电池内部温度;所述注入流量的计算具体为:当前的注入流量,加上k倍的预测的电池内部温度差值。
19、在一些实施方式中,当预测的可燃气体体积达到爆炸下限时,打开排气泵经排气管对储能舱室的内部进行排气;当采集的可燃气体体积位于爆炸极限范围内或高于爆炸上限时,关闭排气泵并保持向储能舱室的内部注入储气罐的液态气体灭火剂。
20、本申请还对应提供一种储能舱室的控制系统,采用上述的灭火排气机器人,包括:
21、数据采集模块,获取储能舱室内部的电池状态数据和可燃气体体积;
22、数据预测模块,根据电池状态数据和可燃气体体积,预测得到电池内部温度和可燃气体体积;
23、控制模块,根据预测的电池内部温度和可燃气体体积,控制灭火排气机器人的储气罐的液态气体灭火剂的注入流量和排气泵的排出流量。
24、在一些实施方式中,还包括数据估算模块,所述数据估算模块根据电池状态数据估算电池内部温度和电池荷电状态,所述电池状态数据包括电池电压、电池电流和电池表面温度。
25、在一些实施方式中,所述数据预测模块包括输入矩阵和输出矩阵;所述输入矩阵包括:电池电压、电池电流、电池表面温度、电池内部温度、电池荷电状态和可燃气体体积;所述输出矩阵包括:电池表面温度、电池内部温度和可燃气体体积。
26、与现有技术相比,本申请的有益效果为:
27、本申请的灭火排气机器人通过移动装置将灭火排气作业装置带到储能舱室,通过对准灭火孔的进气管持续向储能舱室注入灭火剂,通过对准灭火孔的排气管持续排出储能舱室内部的可燃气体,进而解决电池储能舱室的灭火防爆问题,达到远程灭火和减少储能舱室爆炸风险的效果。本申请的灭火排气机器人代替消防员进入火灾现场进行灭火作业,不仅能够保障我国电力系统的稳定性,同时对于消防员的生命安全也有着非常重大的保护意义。
28、本申请的灭火防爆方法不仅具有上述灭火排气机器人的优点,还通过对储能舱室进行预测的数据控制储气罐的注入流量和排气泵的排出流量,一方面保证液态气体灭火剂能够持续地给储能舱室内部的电池进行较长时间的冷却降温,抑制电池热失控的蔓延和火灾复燃,另一方面能够及时可控地将储能舱室内部的可燃气体排出,进一步防止储能舱室发生爆炸;进而实现高效安全灭火,减少火灾损失。
29、本申请实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:1.储能舱室的灭火排气机器人,其特征在于,包括:
2.根据权利要求1所述的储能舱室的灭火排气机器人,其特征在于,所述灭火排气作业装置(1)还包括用于调整所述作业末端(15)位置的机械臂(16);所述机械臂(16)的固定端安装在所述移动装置(2)上,所述机械臂(16)的执行端连接所述作业末端(15)。
3.根据权利要求1所述的储能舱室的灭火排气机器人,其特征在于,所述作业末端(15)包括用于罩设所述储能舱室(4)的灭火孔(41)的密封罩(151);所述进气管(13)的尾端和所述排气管(14)的尾端穿过所述密封罩(151)。
4.根据权利要求1所述的储能舱室的灭火排气机器人,其特征在于,所述作业末端(15)包括用于识别所述储能舱室(4)的灭火孔(41)位置的视觉相机(152)。
5.根据权利要求2所述的储能舱室的灭火排气机器人,其特征在于,所述储能舱室(4)的灭火孔(41)上设有孔盖组件(3),所述孔盖组件(3)包括筒体(31)、盖板(32)、弹性铰链(33)、弹性插销(34)和弹性按钮(35);所述筒体(31)嵌入所述灭火孔(41)内;所述盖板(32)通过所述弹性铰链(33)铰接于所述筒体(31)的端部;所述弹性按钮(35)推动所述弹性插销(34)解锁,使所述盖板(32)在所述弹性铰链(33)的带动下自动翻转,打开所述筒体(31)的端部开口。
6.根据权利要求5所述的储能舱室的灭火排气机器人,其特征在于,所述作业末端(15)包括推杆组件(153)和按钮压杆(154);所述推杆组件(153)的固定端安装在所述机械臂(16)的执行端,所述推杆组件(153)的执行端连接所述按钮压杆(154);所述按钮压杆(154)用于推动所述弹性按钮(35),使所述盖板(32)能够自动翻转打开。
7.根据权利要求1至6任一项所述的储能舱室的灭火排气机器人,其特征在于,所述移动装置(2)为轮式移动底盘,所述轮式移动底盘上安装有用于导航定位的激光雷达、导航摄像头、超声波传感器中的至少一种。
8.储能舱室的灭火防爆方法,采用如权利要求1至7任一项所述的灭火排气机器人,其特征在于,包括以下步骤:
9.根据权利要求8所述的储能舱室的灭火防爆方法,其特征在于,
10.根据权利要求8所述的储能舱室的灭火防爆方法,其特征在于,通过储能舱室(4)的电池管理系统直接获得电池电压、电池电流和电池表面温度,并利用电热耦合模型计算,进一步获得电池内部温度和电池荷电状态;通过储能舱室(4)内部的可燃气体传感器获得其可燃气体体积。
11.根据权利要求8所述的储能舱室的灭火防爆方法,其特征在于,所述电池状态数据包括电池内部温度;所述注入流量的计算具体为:当前的注入流量,加上k倍的预测的电池内部温度差值。
12.根据权利要求8所述的储能舱室的灭火防爆方法,其特征在于,当预测的可燃气体体积达到爆炸下限时,打开排气泵(12)经排气管(14)对储能舱室(4)的内部进行排气;当采集的可燃气体体积位于爆炸极限范围内或高于爆炸上限时,关闭排气泵(12)并保持向储能舱室(4)的内部注入储气罐(11)的液态气体灭火剂。
13.储能舱室的控制系统,采用如权利要求1至7任一项所述的灭火排气机器人,其特征在于,包括:
14.根据权利要求13所述的储能舱室的控制系统,其特征在于,还包括数据估算模块,所述数据估算模块根据电池状态数据估算电池内部温度和电池荷电状态,所述电池状态数据包括电池电压、电池电流和电池表面温度。
15.根据权利要求14所述的储能舱室的控制系统,其特征在于,所述数据预测模块包括输入矩阵和输出矩阵;所述输入矩阵包括:电池电压、电池电流、电池表面温度、电池内部温度、电池荷电状态和可燃气体体积;所述输出矩阵包括:电池表面温度、电池内部温度和可燃气体体积。
技术总结本申请涉及储能电站领域,公开了储能舱室的灭火排气机器人、灭火防爆方法及控制系统。该灭火排气机器人包括:灭火排气作业装置,设有储气罐、排气泵、进气管、排气管和作业末端;进气管的头端与储气罐连接,尾端与作业末端连接;排气管的头端与排气泵连接,尾端与作业末端连接;作业末端用于使进气管和排气管对准储能舱室的灭火孔;移动装置,用于承载并移动灭火排气作业装置。该灭火防爆方法采用上述灭火排气机器人,并基于数据预测控制储气罐的注入流量和排气泵的排出流量。本申请用于解决电池储能舱室的灭火防爆问题,达到远程灭火、排气防爆、降低电池热失控风险和减少储能舱室爆炸风险的效果。技术研发人员:周天念,吴传平,李波,陈宝辉,樊绍胜,刘美麟,刘毓,潘碧宸,谢林瑾受保护的技术使用者:国网湖南省电力有限公司技术研发日:技术公布日:2024/4/8本文地址:https://www.jishuxx.com/zhuanli/20240617/46917.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表