一种具有力检测与接触表面姿态检测功能的软触觉指尖
- 国知局
- 2024-07-05 17:42:56
本发明涉及便携式柔性电子设备,尤其涉及一种具有力检测与接触表面姿态检测功能的软触觉指尖。
背景技术:
1、当前,智能化机器人正突破传统工业应用领域向商业、服务、护理等领域延伸,而在各类复杂应用场景中,机器人稳定抓取是必要的前提。触觉感知是人在抓取物体时感知外界信息的一种重要手段,在机器人自主抓取中有着重要的作用,现在,基于触觉传感技术的柔性触觉传感器正在控制工程、自动化技术等邻域内发挥着其独有的作用,柔性触觉传感器具有柔性并且与人体有着直接或间接的交互,依靠其中的检测、存储等功能模块,可以进行信号的传输和控制,在货运机器人,服务机器人等领域有着广泛的应用。
2、目前,传统的机器人手爪,其设计多为固定的夹取方法,夹取过程固定,无法实时调整夹取方式,只能机械得重复设定得夹取路线,做不到灵活调整夹取方法。现将触觉感知用于优化机器人抓取(现有技术有cn201910946834.4一种多功能聚合物机器人皮肤及其制备方法)。在抓取之前,触觉能够帮助提高对目标场景几何信息的感知,尤其是密集遮挡区域。在抓取过程中,触觉有助于评估抓取成功的可能性。此外,触觉感知可以用来计划重复抓取,调整当前抓取构型以生成一个更稳定的抓取姿态。最后,触觉信息可以作为闭环抓取过程的反馈,根据触觉信息决定如何闭合机械夹爪。
3、综上所述,为机器人手爪的灵巧操作与人机交互提供技术支撑。本发明提出了一种具有力检测与接触表面姿态检测功能的软触觉指尖。
技术实现思路
1、本发明要解决上述现有技术存在的问题,提供一种具有力检测与接触表面姿态检测功能的软触觉指尖,可作为机器人指尖夹具使用,也可以作为人体指尖感应器使用,产品有很好的工业用途,在可穿戴设备领域也有很好的适应性。
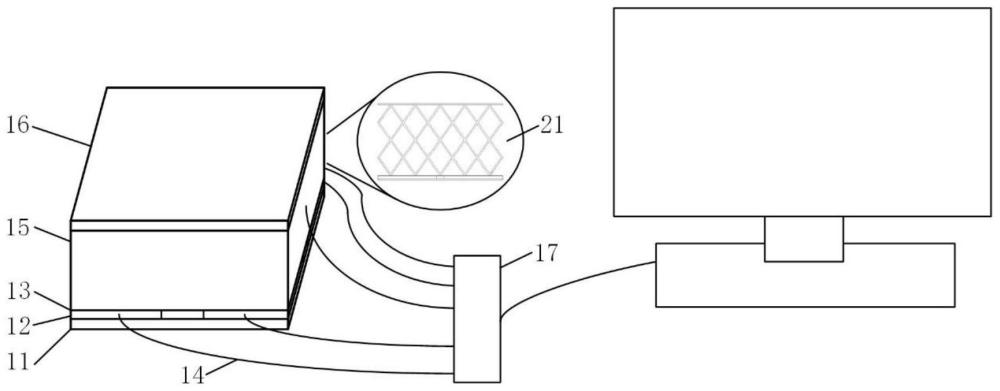
2、本发明解决其技术问题采用的技术方案:一种软触觉指尖,包括基板、监测电极、介电层、弹性电极和压板,所述基板上矩形阵列分布至少四个监测电极,监测电极的上方设置一块弹性电极,弹性电极上方设置一块用于接触物体的压板;所述监测电极与弹性电极之间设置介电层进行隔离,形成电容传感器结构。
3、当弹性电极发生弹性形变后,能够通过四个位置的监测电极(12)检测到四个电容值,利用四个电容值的变化规律,得到软触觉指尖的变形姿态和所受压力的大小,实现力检测与接触表面姿态检测功能。
4、进一步完善,所述监测电极和弹性电极分别电性连接到柔性处理模块,柔性处理模块与电脑或控制设备相连接。
5、进一步完善,所述柔性处理模块包括电容采集模块、信号传输串口、滤波模块和信号采集模块。
6、进一步完善,所述监测电极为高导电率铝箔。
7、进一步完善,所述弹性电极为弹性镀镍海绵。
8、进一步完善,所述介电层为pvdf薄膜,其厚度≤0.5mm。
9、进一步完善,软触觉指尖固定安装在机器人夹爪上,用于反馈控制调节机器人夹爪的夹取位置和夹持力大小。
10、进一步完善,所述基板和压板之间设有滑动变阻器,滑动变阻器包括分别固定安装在基板和压板上的电阻线和弹性触点,弹性触点与电阻线相接触,在介电层和弹性电极上设有供弹性触点穿过的镂空通道。
11、本发明有益的效果是:软触觉指尖结构轻薄,有一定的柔弹性,制作工艺简单,成本较低。软触觉指尖得益于四电容分布式特殊结构,当弹性电极发生变形后,能够得到不同的四个电容值,利用四个电容值的变化规律,实现软触觉指尖的变形姿态检测和所受压力的大小,从而控制机器人夹爪进行相应的夹取动作。与单个电容传感器的现有技术相比,该软触觉指尖是监测多点电容值的具体的电容压力传感器结构,用以显示出传感器变形姿态。结构简单,易于制备与使用,制造成本低于10元,弹性结构可保护机器人抓取,给予一定的缓冲,可用于拓展机器人抓取领域,辅助人体抓取等。
技术特征:1.一种软触觉指尖,其特征在于:包括基板(11)、监测电极(12)、介电层(13)、弹性电极(15)和压板(16),所述基板(11)上矩形阵列分布至少四个监测电极(12),监测电极(12)的上方设置一块弹性电极(15),弹性电极(15)上方设置一块用于接触物体的压板(16);所述监测电极(12)与弹性电极(15)之间设置介电层(13)进行隔离,形成电容传感器结构;
2.根据权利要求1所述的一种软触觉指尖,其特征在于:所述监测电极(12)和弹性电极(15)分别电性连接到柔性处理模块(17),柔性处理模块(17)与电脑或控制设备相连接。
3.根据权利要求2所述的一种软触觉指尖,其特征在于:所述柔性处理模块(17)包括电容采集模块、信号传输串口、滤波模块和信号采集模块。
4.根据权利要求1所述的一种软触觉指尖,其特征在于:所述监测电极(12)为高导电率铝箔。
5.根据权利要求1所述的一种软触觉指尖,其特征在于:所述弹性电极(15)为弹性镀镍海绵。
6.根据权利要求1所述的一种软触觉指尖,其特征在于:所述介电层(13)为pvdf薄膜,其厚度≤0.5mm。
7.根据权利要求1所述的一种软触觉指尖,其特征在于:软触觉指尖固定安装在机器人夹爪上,用于反馈控制调节机器人夹爪的夹取位置和夹持力大小。
8.根据权利要求1所述的一种软触觉指尖,其特征在于:所述基板(11)和压板(16)之间设有滑动变阻器,滑动变阻器包括分别固定安装在基板(11)和压板(16)上的电阻线(22)和弹性触点(23),弹性触点(23)与电阻线(22)相接触,在介电层(13)和弹性电极(15)上设有供弹性触点(23)穿过的镂空通道。
技术总结本发明公开一种具有力检测与接触表面姿态检测功能的软触觉指尖,可以用于连接电脑等设备进行人机交互,其主体包括压板、弹性电极、四块监测电极、介电层和基板组成。弹性电极为孔隙结构的弹性镀镍海绵,介电层由PVDF薄膜构成,弹性电极和监测电极与柔性处理模块相连接,柔性处理模块与带显示设备的主机相连接。本发明的具有力检测与接触表面姿态检测功能的软触觉指尖,基于弹性电极,采用分布式电容排列,结构简单,响应灵敏,指尖主体轻薄,小巧,具有一定的柔弹性,可穿戴于手指表面。技术研发人员:张友志,王浩杰,陈昌安,李杭泽,马超林受保护的技术使用者:温州大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240617/48859.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。