一种基于显微视觉伺服的精密定位系统及方法与流程
- 国知局
- 2024-07-05 17:42:52
本发明涉及定位系统领域,特别是一种基于显微视觉伺服的精密定位系统及方法。
背景技术:
1、精密定位技术作为一种先进技术,正在被广泛应用于集成电路制造、高能束刻蚀、微创外科手术、精密和超精密加工、生物细胞工程等领域,关乎国家的科学技术发展与科技进步。在加工制造和机器人等领域,精密定位是指将一个目标准确地定位到某个给定坐标系下的参考点。实现精密定位,需要一整套系统,包括机械机构、驱动器、传感器、控制器等,这一系统即精密运动台。在精密运动台中,高精度位移传感器起着至关重要的作用,现有技术仅采用光栅尺作为检测线性位移的传感器,但是光栅尺通常安装在直线运动模组的导轨上用来测量直线电机动子的位移,利用电机的位移代替运动平台的实际末端位移即载物台的位移,而无法直接测量载物台的二维输出位移,因此运动平台机械系统的结构间隙、结构弹性变形以及光栅尺的安装误差、光栅尺热变形等造成的测量误差均会影响到平台末端的定位精度。
2、传统精密定位系统在2自由度、大量程运动时定位不准确,且每隔一段时间都需要对系统的精度进行重新标定以补偿误差。此外,当精密定位平台具有多个运动自由度时就需要多个光栅尺等传感器组合使用,这不仅增加了整个定位平台的测量复杂度和成本,且对各个传感器的安装精度要求极高。最后,现有技术无法实时监测运动平台的运动过程。
3、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种基于显微视觉伺服的精密定位系统及方法。用于解决传统系统无法实现直接反馈精密定位系统末端位移的技术问题,在保证定位精度的前提下,本发明基于显微视觉伺服技术,利用绝对式编码微结构视觉标靶,实现了运动台绝对位置的快速精准定位。
技术实现思路
1、本发明的目的是提供一种基于显微视觉伺服的精密定位系统及方法,实现运动台绝对位置的快速精准定位。
2、本发明的目的通过以下技术方案来实现:
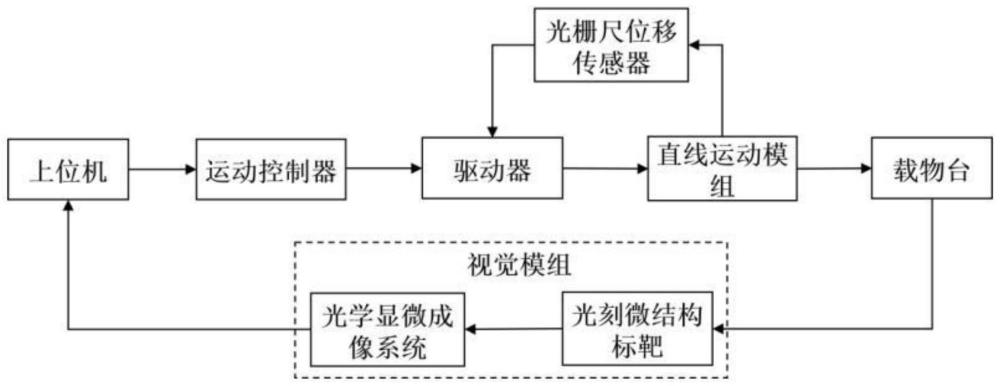
3、一种基于显微视觉伺服的精密定位系统,包括上位机、运动控制器、驱动器、运动模组、载物台、视觉模组和大理石组件,所述运动模组固定在大理石组件上,载物台连接在运动模组上,视觉模组与载物台同步运动,上位机与运动控制器通过以太网进行连接,运动控制器与驱动器通过串口连接,驱动器与运动模组连线接通。
4、所述运动模组包括以龙门形式进行安装的两个y轴直线运动模组和一个x轴直线运动模组;所述大理石组件包括大理石底座和大理石构件,两个大理石构件平行固定在大理石底座的两端,两个y轴直线运动模组分别固定在两个大理石构件上。
5、每个所述y轴直线运动模组均包括光电传感器ⅰ、导轨ⅰ、光栅尺ⅰ、滑块ⅰ和直线电机ⅰ,所述导轨ⅰ、光栅尺ⅰ平行固定在大理石构件上,滑块ⅰ滑动在导轨ⅰ上,光电传感器ⅰ固定在滑块ⅰ上且与光栅尺ⅰ对应,直线电机ⅰ固定在大理石构件上用于传动滑块ⅰ移动。
6、所述滑块的两端与大理石构件的两端之间均设有防尘风琴罩。
7、所述x轴直线运动模组包括支撑板、运动滑台、光电传感器ⅱ、滑块ⅱ、直线电机ⅱ、导轨ⅱ和光栅尺ⅱ,支撑板的两端分别固定在两个滑块ⅰ上,导轨ⅱ和光栅尺ⅱ平行固定在支撑板上,滑块ⅱ滑动在导轨ⅱ上,光电传感器ⅱ固定在滑块ⅱ上且与光栅尺ⅱ对应,直线电机ⅱ固定在支撑板上且用于传动滑块ⅱ滑动,运动滑台固定在滑块ⅱ上,载物台固定在运动滑台上。
8、所述支撑板上固定有防尘挡板,防尘挡板位于运动滑台和载物台之间。
9、所述视觉模组包括光学显微成像系统和光刻微结构标靶,光学显微成像系统连接在运动滑台的侧面,光刻微结构标靶位于光学显微成像系统的下方且固定在大理石底座上。
10、所述光学显微成像系统包括微分升降机构、工业相机、光学远心镜头和同轴光源,所述微分升降机构固定在运动滑台的侧面,工业相机固定在微分升降机构上,光学远心镜头固定在工业相机的下端,同轴光源固定在光学远心镜头上。
11、所述光刻微结构标靶包括标靶压板、硅胶垫片ⅰ、光刻玻璃、硅胶垫片ⅱ、镜面反射板和标靶底板,硅胶垫片ⅰ、光刻玻璃、硅胶垫片ⅱ和镜面反射板依次堆叠在标靶压板与标靶底板之间,且标靶压板与标靶底板固定连接,所述光刻玻璃为石英玻璃,且其表面设有光刻编码图案。
12、所述的一种基于显微视觉伺服的精密定位系统的方法,该方法包括以下步骤:
13、s1、打开上位机,打开并初始化光学显微成像系统1-2,点击标定按钮;
14、s2、工业相机4-2对光刻微结构标靶1-4进行拍照,上位机获得高分辨率图像,包含光刻微结构标靶1-4上的光刻编码图案5-7;
15、s3、上位机对步骤s2得到的图像进行灰度处理,对得到的灰度图进行高斯滤波和阈值分割获得二值图像;
16、s4、对步骤s3得到的二值图像进行边缘检测,提取图像中的所有轮廓,遍历所有轮廓计算每个轮廓的面积和周长,利用每个轮廓的面积和周长计算其圆度从而筛选其中符合要求的圆轮廓;
17、s5、对步骤s4得到的中心定位圆轮廓进行椭圆拟合得到二值图像中的4个中心定位圆在图像坐标系中的圆心坐标;
18、s6、将步骤s5得到的圆心在图像坐标系中的坐标和它们在世界坐标系中的物理坐标组合成矩阵;
19、s7、利用最小二乘法求解步骤s6得到的仿射变换线性方程组来找到最优的仿射变换矩阵,最终得到图像坐标系到世界坐标系的坐标变换关系,完成了编码图案坐标系的标定,得到x方向和y方向的像素大小,以及编码图案坐标系的x轴相对于运动模组x轴的旋转角度α;
20、s8、标定完成之后,在上位机上打开并初始化运动控制器,等待操作人员输入运动目标位置;
21、s9、上位机接收到运动指令后,向运动控制器发送运动命令,运动控制器将运动指令转为相应的电信号发给驱动器,并接收光栅尺反馈的的位置信号,开始进行粗运动;
22、s10、在运动过程中,与载物台1-3同步运动的光学显微成像系统1-2实时采集固定不动的光刻微结构标靶1-4上的光刻编码图案5-7;
23、s11、重复步骤s3、s4、s5对步骤s10采集到的图像进行处理,得到一帧图像内所有编码单元中心定位圆的圆心像素坐标;
24、s12、以步骤s11得到的圆心坐标作为几何中心点对二值图像进行裁剪得到感兴趣区域roi,并滤除图案不完整的编码单元;
25、s13、根据roi区域中的同心环编码带对图案进行解码;
26、s14、根据编码单元的实际横向间隔与纵向间隔距离,得到该编码单元相对于编码图案坐标系原点的实际坐标;
27、s15、根据标定结果,进一步得到该编码单元在旋转α后的编码图案坐标系中的实际坐标;
28、s16、若一帧图像中有多个完整的编码单元,则对所有编码单元得到的载物台坐标取平均值;
29、s17、在载物台1-3运动过程中光学显微成像系统1-2连续采集光刻微结构标靶1-4表面图像,实时计算并保存当前载物台1-3二维坐标,得到载物台1-3运动过程中的一系列坐标点,最终得到载物台实时运动轨迹;
30、s18、粗运动完成后,运动控制器向上位机发送粗运动完成的信号,上位机比较由视觉模组得到的当前载物台1-3的实际位置与输入的目标位置,再次向运动控制器发送运动命令,对粗运动的运动误差进行补偿,开始精运动;
31、s19、精运动完成之后,运动误差得到补偿,本次运动结束。
32、本发明的有益效果为:
33、1、利用绝对式编码微结构视觉标靶,实现了载物台绝对位置的快速精准定位;
34、2、能够监测载物台在运动过程中的实时轨迹。
本文地址:https://www.jishuxx.com/zhuanli/20240617/48851.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表