一种可旋转三爪抓取装置
- 国知局
- 2024-07-05 17:49:26
:本技术涉及抓取装置领域,具体涉及为一种可旋转三爪抓取装置。
背景技术:
0、技术背景:
1、机械手是工业生产中不可或缺的辅助设备,与机械手相连接的抓取装置可以使机械手更加有效地抓取工业产品或进行物料运输。但市面上的机械手大多只有两爪,抓取物品时经常会出现物品重心不稳最后抓取失败的现象,也容易出现为保证抓取效果而使用过大抓紧力所导致的物品损坏的情况,而三爪抓手在抓取时可以有效保证物品的稳定性,指爪受力均匀,便于控制力的大小。并且目前工业应用的三爪抓手的抓取能力一般都有限,不仅抓取装置过于笨重,需要大量的空间,还需根据物品位置、大小、形状等信息对不同种类的物品进行适应性调整,装置的简易性、便携性以及通用性都相对较差,严重影响实际生产中的工作效率,不利于自动化生产工厂的发展。
技术实现思路
0、技术实现要素:
1、针对现有技术的不足,本实用新型的目的在于提供一种可旋转三爪抓取装置,配合现有机器人或滑轨,高效稳定地进行物品的分拣和转移,改善抓取装置的实用性,提高实际分拣效率。
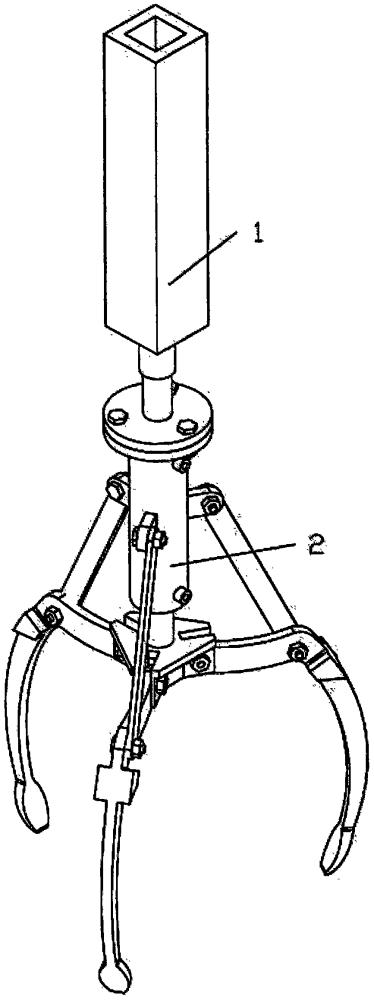
2、本实用新型采用的技术方案如下:一种可旋转三爪抓取装置,包括旋转机构和抓取机构,所述旋转机构包括外壳,丝杠螺母固接于所述外壳的下端,所述丝杠螺母与丝杠通过螺纹副连接,所述丝杠与电机的输出轴同轴地固接,所述电机可沿所述外壳滑动,所述丝杠下段穿出于所述丝杠螺母,所述丝杠下端固接于连接底板;所述抓取机构包括缸体,所述缸体的上端固接于连接顶板,所述连接顶板与连接底板通过螺栓连接,所述缸体内部滑动插设有活塞杆,所述活塞杆的下端与卡子固接,所述卡子与指爪铰接,所述指爪与连接杆的下端铰接,所述缸体侧面均匀分布三个凸耳,相邻两个所述凸耳间的夹角为120°,所述连接杆的上端与所述凸耳铰接,所述指爪的数量为三个,每个所述指爪均匹配一个所述连接杆。
3、所述外壳的下端面设有圆形通孔,所述圆形通孔的圆心与所述丝杠螺母的圆心在同一竖直线上,所述圆形通孔的直径略大于所述丝杠的直径。
4、所述电机的壳体与外壳的形状匹配,使所述电机可沿所述外壳的内侧面滑动。
5、所述电机选取可调速电机,通过不同转速分别控制指爪的位置与姿态。
6、所述电机的输出轴与所述丝杠的上端通过联轴器固接。
7、所述缸体与所述活塞杆组成的气缸驱动装置为双作用气缸驱动装置。
8、所述指爪包括连接段和抓手段,所述连接段与所述抓手段的交接处为铰接处,所述铰接处与所述连接杆的下端铰接。
9、所述连接段呈i型形状或小角度弧形,所述抓手段为c型条状或大角度弧形。
10、所述指爪均匀分布于所述卡子,且相邻两个所述指爪间的夹角为120°,每个所述指爪均与一个所述凸耳位置相对应。
11、综上所示,与现有技术相比,本实用新型的有益效果在于:
12、1、抓取机构可以受控制地进行旋转,对不同的物品可以进行适应性调整,使抓取装置能够更好应对各种姿态及形状的物品;
13、2、由气压驱动的抓取机构可以保证抓取及运输时的牢固;且由于三个指爪均与卡子连接,故指爪同时被驱动,使指爪运动轨迹便于控制,提高了抓取的准确性以及可控性。
14、3、本实用新型结构简单,可抓取物品种类、形状、位置均多于现有相关技术,提高工作效率,减少工作失误,使设备更加高效地完成所设计的功能。
技术特征:1.一种可旋转三爪抓取装置,包括旋转机构(1)以及抓取机构(2),其特征在于:所述旋转机构(1)包括外壳(101)、丝杠螺母(102)、丝杠(103)、电机(104)、连接底板(105),所述丝杠螺母(102)固接于所述外壳(101)的下端,所述丝杠螺母(102)与所述丝杠(103)通过螺纹副连接,所述丝杠(103)与所述电机(104)的输出轴同轴地固接,所述电机(104)可沿所述外壳(101)滑动,所述丝杠(103)下段穿出于所述丝杠螺母(102),所述丝杠(103)下端固接于所述连接底板(105);所述抓取机构(2)包括缸体(201)、连接顶板(202)、活塞杆(203)、卡子(204)、指爪(205)及连接杆(206),所述缸体(201)的上端固接于所述连接顶板(202),所述连接顶板(202)与所述连接底板(105)通过螺栓连接,所述缸体(201)内部滑动插设有所述活塞杆(203),所述活塞杆(203)的下端与所述卡子(204)固接,所述卡子(204)与所述指爪(205)铰接,所述指爪(205)与所述连接杆(206)的下端铰接,所述缸体(201)侧面均匀分布三个凸耳(207),相邻两个所述凸耳(207)间的夹角为120°,所述连接杆(206)的上端与所述凸耳(207)铰接,所述指爪(205)的数量为三个,每个所述指爪(205)均匹配一个所述连接杆(206)。
2.根据权利要求1所述的可旋转三爪抓取装置,其特征在于:所述外壳(101)的下端面设有圆形通孔(106),所述圆形通孔(106)的圆心与所述丝杠螺母(102)的圆心在同一竖直线上,所述圆形通孔(106)的直径略大于所述丝杠(103)的直径。
3.根据权利要求1所述的可旋转三爪抓取装置,其特征在于:所述电机(104)的壳体与外壳(101)的形状匹配,使所述电机(104)可沿所述外壳(101)的内侧面滑动。
4.根据权利要求3所述的可旋转三爪抓取装置,其特征在于:所述电机(104)选取可调速电机,通过不同转速分别控制指爪(205)的位置与姿态。
5.根据权利要求4所述的可旋转三爪抓取装置,其特征在于:所述电机(104)的输出轴与所述丝杠(103)的上端通过联轴器固接。
6.根据权利要求1所述的可旋转三爪抓取装置,其特征在于:所述缸体(201)的侧面有两个气孔,所述缸体(201)、所述气孔与所述活塞杆(203)组成的气缸驱动装置为双作用气缸驱动装置。
7.根据权利要求1所述的可旋转三爪抓取装置,其特征在于:所述指爪(205)包括连接段和抓手段,所述连接段与所述抓手段的交接处为铰接处,所述铰接处与所述连接杆(206)的下端铰接。
8.根据权利要求7所述的可旋转三爪抓取装置,其特征在于:所述连接段呈i型形状或小角度弧形,所述抓手段为c型条状或大角度弧形。
技术总结本技术涉及一种可旋转三爪抓取装置,该装置包括旋转机构及抓取机构。旋转机构由外壳、丝杠、丝杠螺母和电机构成,外壳与机器人本体连接,丝杠螺母固接在外壳上,丝杠旋转运动时既可以控制抓取机构位置,也可以控制抓取机构姿态,电机可滑动地设于外壳内部随丝杠共同运动;抓取机构由缸体、卡子、活塞杆、三个指爪和三个连接杆构成,活塞杆依靠气压驱动装置沿缸体进行移动,与活塞杆连接的卡子可控制指爪的开合。旋转机构与抓取机构通过螺栓连接,使指爪不仅可以通过开合进行抓取,还可以根据物体姿态进行位姿调整,可以更加高效地进行多种位置及姿态、不同大小的物体的抓取,提高整体分拣效率。技术研发人员:张劭哲,丁照琪,张建辉受保护的技术使用者:河北工业大学技术研发日:20230927技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49238.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表