地轨桁架机器人的制作方法
- 国知局
- 2024-07-05 17:51:30
本技术涉及货物搬运机器人,具体为地轨桁架机器人。
背景技术:
1、传统搬运近距离小件多为人工搬运,效率不高,且存在一定的风险。市场没有针对性的自动化搬运设备或产品,因此需要一种负载的桁架,对特定位置进行搬运。
2、桁架式机器人也叫做直角坐标机器人,由桁架、机械臂(x、y、两轴组件)、驱动系统三个部分。是能够实现自动控制的、基于空间x、y直角坐标系可重复编程的、多自由度的、适合不同任务的自动化设备。
技术实现思路
1、本实用新型的目的在于提供地轨桁架机器人,解决背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
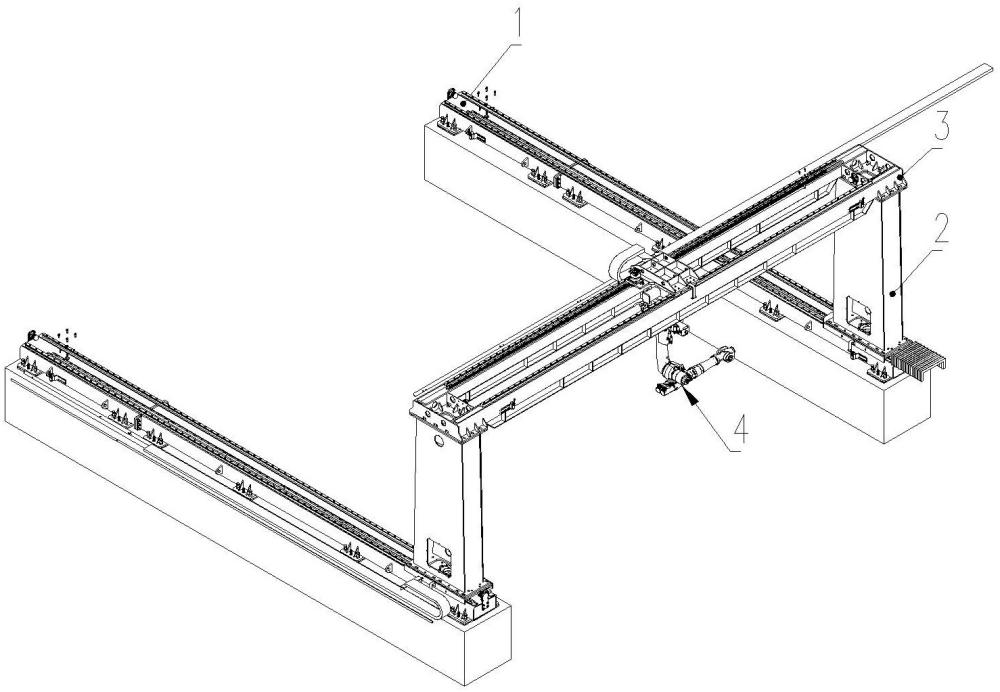
3、地轨桁架机器人,包括x轴,x轴顶端设有立柱,立柱之间设有横梁组,所述x轴包括纵梁、导轨ⅰ、齿条ⅰ,所述纵梁顶端设有导轨ⅰ,所述导轨ⅰ内侧设有齿条ⅰ,所述导轨ⅰ顶端设有x轴移动座;
4、所述立柱底端与x轴移动座连接,所述立柱顶端与横梁组连接;
5、所述横梁组包括横梁、导轨ⅱ、齿条ⅱ、横梁移动板、机器人吊装座,所述横梁顶端设有导轨ⅱ,所述导轨ⅱ内侧设有齿条ⅱ,所述导轨ⅱ设有与其配合使用的横梁移动板,所述横梁移动板一侧设有机器人吊装座,所述机器人吊装座与齿条ⅱ啮合,所述机器人吊装座设有机器人。
6、进一步,所述纵梁底端设有用于连接台面的地脚板。
7、进一步,所述纵梁两端均设有x轴限位,所述纵梁两侧均设有吊环。
8、进一步,所述立柱包括立柱底板、立柱主体、立柱顶板,所述立柱主体底端设有立柱底板,所述立柱底板与x轴移动座连接,所述立柱主体顶端设有立柱顶板。
9、进一步,所述横梁底端设有横梁底板,所述立柱顶板与横梁底板连接。
10、进一步,所述横梁两侧设有用于加固的加固板,所述横梁设有行程开关及限位。
11、与现有技术相比,本实用新型的有益效果是:
12、桁架机器人具有高性价比、高可靠性、高速度、高精度、适应恶劣环境、可长期工作,便于操作维修等特点。特别适用于多品种,以便批量的柔性化作业,对于稳定、提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
技术特征:1.地轨桁架机器人,包括x轴(1),x轴(1)顶端设有立柱(2),立柱之间设有横梁组(3),其特征在于,所述x轴(1)包括纵梁(1.3)、导轨ⅰ(1.4)、齿条ⅰ(1.5),所述纵梁(1.3)顶端设有导轨ⅰ(1.4),所述导轨ⅰ(1.4)ⅰ内侧设有齿条ⅰ(1.5),所述导轨ⅰ(1.4)顶端设有x轴移动座(1.7);
2.如权利要求1所述的地轨桁架机器人,其特征在于,所述纵梁(1.3)底端设有用于连接台面的地脚板(1.1)。
3.如权利要求1所述的地轨桁架机器人,其特征在于,所述纵梁(1.3)两端均设有x轴限位(1.2),所述纵梁(1.3)两侧均设有吊环(1.6)。
4.如权利要求1所述的地轨桁架机器人,其特征在于,所述立柱(2)包括立柱底板(2.1)、立柱主体(2.2)、立柱顶板(2.3),所述立柱主体(2.2)底端设有立柱底板(2.1),所述立柱底板(2.1)与x轴移动座(1.7)连接,所述立柱主体(2.2)顶端设有立柱顶板(2.3)。
5.如权利要求4所述的地轨桁架机器人,其特征在于,所述横梁(3.2)底端设有横梁底板(3.1),所述立柱顶板(2.3)与横梁底板(3.1)连接。
6.如权利要求4所述的地轨桁架机器人,其特征在于,所述横梁(3.2)两侧设有用于加固的加固板(3.5),所述横梁(3.2)设有行程开关(3.8)及限位(3.9)。
技术总结本技术公开了地轨桁架机器人,包括X轴,X轴顶端设有立柱,立柱之间设有横梁组,所述X轴包括纵梁、导轨、齿条,所述纵梁顶端设有导轨Ⅰ,所述导轨Ⅰ内侧设有齿条Ⅰ,所述导轨Ⅰ顶端设有X轴移动座;所述立柱底端与X轴移动座连接,所述立柱顶端与横梁组连接。本技术的有益效果是:桁架机器人具有高性价比、高可靠性、高速度、高精度、适应恶劣环境、可长期工作,便于操作维修等特点。特别适用于多品种,以便批量的柔性化作业,对于稳定、提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代起着十分重要的作用。技术研发人员:李继久受保护的技术使用者:徐州特鲁门自动化科技有限公司技术研发日:20230317技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49351.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表