宠物机器人及其控制方法、装置及存储介质与流程
- 国知局
- 2024-07-05 17:53:39
本申请涉及人工智能,更具体地说,涉及一种宠物机器人及其控制方法、装置及存储介质。
背景技术:
1、宠物机器人是一类旨在模仿真实宠物行为并提供陪伴功能的机器人产品,比如,猫形机器人,狗形机器人等。宠物机器人在开启后,可以与用户进行对话交互,也可以为用户提供学习或娱乐内容,但目前的宠物机器人在开启后,只能与用户进行交互,其智能性有待进一步提高。
技术实现思路
1、有鉴于此,本申请提供了一种宠物机器人及其控制方法、装置及存储介质,以提高宠物机器人的智能性。
2、为了实现上述目的,现提出的方案如下:
3、一种宠物机器人控制方法,包括:
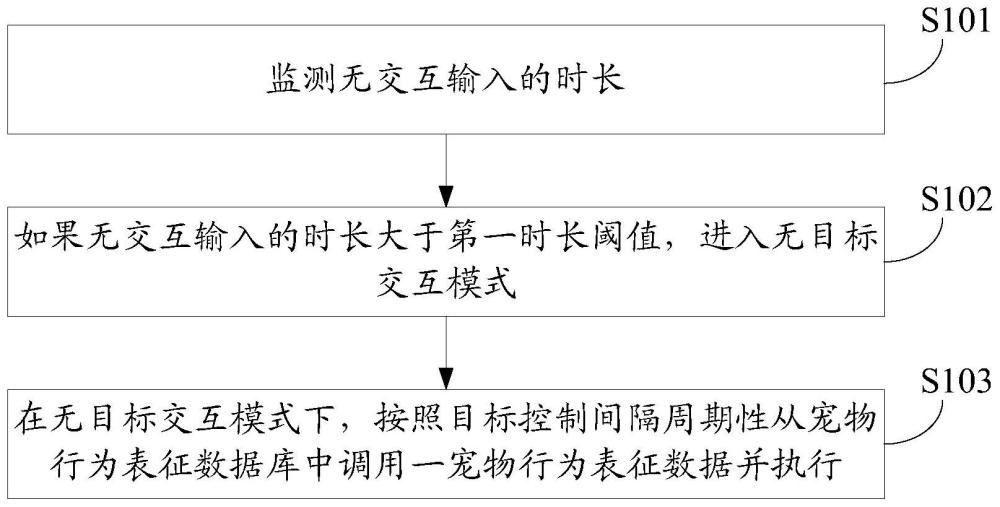
4、监测无交互输入的时长;
5、如果所述无交互输入的时长大于第一时长阈值,进入无目标交互模式;
6、在所述无目标交互模式下,按照目标控制间隔周期性从宠物行为表征数据库中调用一宠物行为表征数据并执行,以控制所述宠物机器人周期性执行所调用的宠物行为表征数据所表征的宠物行为。
7、上述方法,可选的,所述目标控制间隔根据所述无交互输入的时长确定。
8、上述方法,可选的,根据所述无交互输入的时长确定所述目标控制间隔的过程,包括:
9、确定所述无交互输入的时长所属的时长范围;
10、将所述时长范围对应的控制间隔确定为所述目标控制间隔;
11、不同时长范围的交集为空;时长范围内的最大时长越大,对应的控制间隔越大。
12、上述方法,可选的,根据所述无交互输入的时长确定所述目标控制间隔的过程,包括:
13、确定所述无交互输入的时长所属的时长范围;不同时长范围的交集为空;
14、在所述时长范围对应的控制间隔范围内随机选择一个控制间隔作为所述目标控制间隔;
15、不同的时长范围对应的控制间隔范围的交集为空;时长范围内的最大时长越大,对应的控制间隔范围内的最大控制间隔越大。
16、上述方法,可选的,还包括:
17、在所述无目标交互模式下,监测环境音的音量;
18、如果环境音的音量大于音量阈值,从宠物行为表征数据库中调用与所述环境音对应的宠物行为表征数据并执行,以控制所述宠物机器人执行与所述环境音相适配的宠物行为。
19、上述方法,可选的,所述如果所述无交互输入的时长大于第一时长阈值,进入无目标交互模式,包括:
20、如果所述无交互输入的时长大于第一时长阈值,且所述宠物机器人的存储电量高于第一电量阈值,进入无目标交互模式。
21、上述方法,可选的,还包括:
22、如果获得输入的交互信息,退出所述无目标交互模式;
23、响应于所述交互信息,输出交互应答信息;
24、返回执行所述监测无交互输入的时长的步骤。
25、一种宠物机器人控制装置,包括:
26、监测模块,用于监测无交互输入的时长;
27、模式控制模块,用于如果所述无交互输入的时长大于第一时长阈值,进入无目标交互模式;
28、交互控制模块,用于在所述无目标交互模式下,按照目标控制间隔周期性从宠物行为表征数据库中调用一宠物行为表征数据并执行,以控制所述宠物机器人周期性执行所调用的宠物行为表征数据所表征的宠物行为。
29、一种宠物机器人,包括存储器和处理器;
30、所述存储器,用于存储程序;
31、所述处理器,用于执行所述程序,实现如上任一项所述的宠物机器人控制方法的各个步骤。
32、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上任一项所述的宠物机器人控制方法的各个步骤。
33、从上述的技术方案可以看出,本申请实施例提供的宠物机器人及其控制方法、装置及存储介质,可以监测无交互输入的时长,在无交互输入的时长大于第一时长阈值的情况下,进入无目标交互模式,在该无目标交互模式下,按照目标控制间隔周期性从宠物行为表征数据库中调用一宠物行为表征数据并执行,以控制宠物机器人周期性执行所调用的宠物行为表征数据所表征的宠物行为。基于本申请,宠物机器人可以在没有用户与其交互情况下自主执行其所仿生生物的行为,表现出与动物宠物相似的生物习性,从而增加宠物机器人的生物灵性,让宠物机器人更加自然,提高了宠物机器人的智能性。
技术特征:1.一种宠物机器人控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述目标控制间隔根据所述无交互输入的时长确定。
3.根据权利要求2所述的方法,其特征在于,根据所述无交互输入的时长确定所述目标控制间隔的过程,包括:
4.根据权利要求2所述的方法,其特征在于,根据所述无交互输入的时长确定所述目标控制间隔的过程,包括:
5.根据权利要求1所述的方法,其特征在于,还包括:
6.根据权利要求1所述的方法,其特征在于,所述如果所述无交互输入的时长大于第一时长阈值,进入无目标交互模式,包括:
7.根据权利要求1所述的方法,其特征在于,还包括:
8.一种宠物机器人控制装置,其特征在于,包括:
9.一种宠物机器人,其特征在于,包括存储器和处理器;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-7中任一项所述的宠物机器人控制方法的各个步骤。
技术总结本申请实施例公开了一种宠物机器人及其控制方法、装置及存储介质,可以监测无交互输入的时长,在无交互输入的时长大于第一时长阈值的情况下,进入无目标交互模式,在该无目标交互模式下,按照目标控制间隔周期性从宠物行为表征数据库中调用一宠物行为表征数据并执行,以控制宠物机器人周期性执行所调用的宠物行为表征数据所表征的宠物行为。基于本申请,宠物机器人可以在没有用户与其交互情况下自主执行其所仿生生物的行为,表现出与动物宠物相似的生物习性,从而增加宠物机器人的生物灵性,让宠物机器人更加自然,提高了宠物机器人的智能性。技术研发人员:吴玉胜,李守毅,王晓斐受保护的技术使用者:安徽淘云科技股份有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49522.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表