扭转收束式空间柔性捕获机械手
- 国知局
- 2024-07-08 10:48:07
本发明涉及机械手,具体涉及一种扭转收束式空间柔性捕获机械手。
背景技术:
1、空间捕获机构是空间机器人系统的核心功能单元,主要承载对捕获目标的抓捕、消旋、防逃逸等控制性工作。空间捕获机器人系统在初步研究阶段中基本以刚性结构作为运动载体,即捕获功能的实现需要借助空间操作臂系统的运动。
2、现有捕获机构主要分为刚性捕获和柔性捕获,刚性捕获主要用于对静止目标的捕获,具有一定的局限性,而柔性捕获机构则具有较好的形状适应性特点,可实现对目标的有效包络捕获,但缺乏重复利用性,随着刚柔耦合系统的提出,以柔索为主体或驱动方式的空间捕获理论逐渐成为了研究热点,刚柔耦合系统既拥有刚性捕获系统的可重复性,又可以实现对目标的包络捕获。
3、专利文献cn114407053a公开一种基于变胞原理的机械手,该发明利用变胞原理使机械手能很好地对物体进行包络,同时通过欠驱动装置削弱了抓取时对物体的刚性冲击,但其结构复杂且不易控制。因此有必要设计一种扭转收束式空间柔性捕获机械手。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种扭转收束式空间柔性捕获机械手,首先通过捕获折展组件完成机构展开,展开后通过扭转收束组件进行扭转收束,通过绳索驱动组件实现对捕获目标的变刚度捕获,同时通过刚性折展及扭转机构与柔性捕获绳网配合,形成刚柔耦合机械手进行捕获,具有捕获效率和精度高、适应性强、容许捕获偏差大、易于控制和稳定性高等优点。
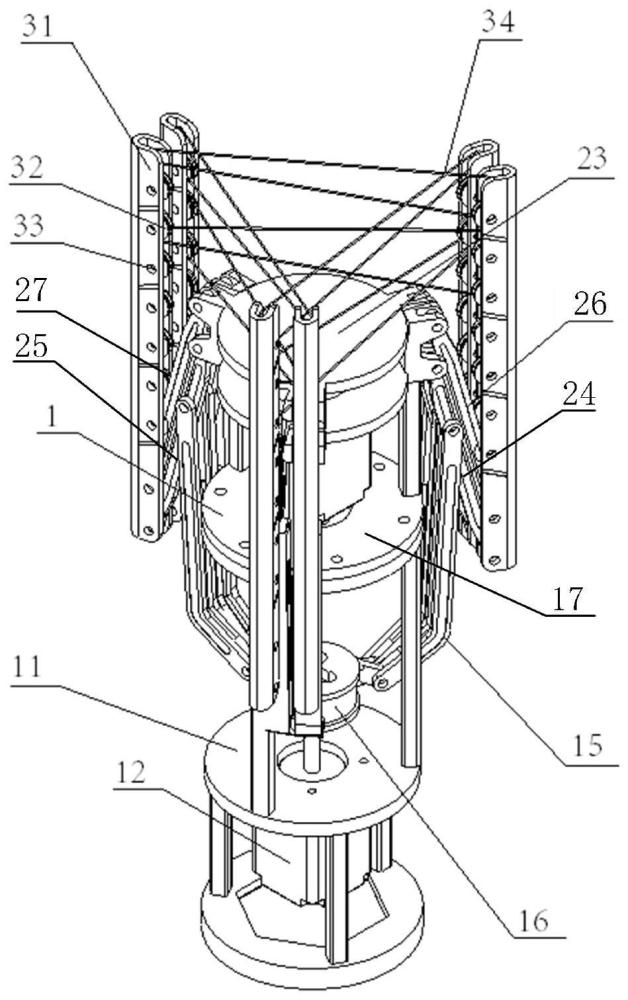
2、本发明提供了一种扭转收束式空间柔性捕获机械手,其包括捕获折展组件、扭转收束组件和绳索驱动组件,所述扭转收束组件位于所述捕获折展组件上方,所述扭转收束组件的扭转连杆与所述捕获折展组件的折展连杆转动连接,所述绳索驱动组件沿圆周等间距设置在所述扭转收束组件周侧,所述绳索驱动组件的捕获连杆与所述扭转收束组件的扭转连杆连接,所述捕获折展组件,其包括底架台、丝杆电机、丝杠、折展连杆和移动花盘,所述丝杆电机设置在所述底架台底部,所述丝杠电机的输出轴与所述丝杠的第一端连接,所述移动花盘套装在所述丝杠上且两者之间螺旋传动,所述锁紧螺母设置在所述移动花盘底部,所述折展连杆沿圆周设置在所述移动花盘周侧,且所述折展连杆的第一端与所述移动花盘转动连接,所述丝杠在所述丝杠电机的驱动下使所述移动花盘升降,实现所述折展连杆的折展,从而构成捕获折展阶段;所述扭转收束组件,其包括顶架台、扭转电机、扭转花盘、第一扭转连杆、第二扭转连杆、第一连杆和第二连杆,所述扭转电机设置在所述顶架台底部,所述扭转花盘与所述扭转电机的输出轴连接,所述第一扭转连杆、第一连杆的第一端与所述扭转花盘转动连接,所述第二扭转连杆、第二连杆的第一端与所述顶架台转动连接,所述折展连杆的第二端分别与所述第一扭转连杆、第二扭转连杆中部转动连接,所述扭转花盘通过所述扭转电机旋转,实现所述第一扭转连杆的扭转收束,从而构成捕获收束阶段;所述绳索驱动组件,其包括捕获连杆、旋转滑轮、轴承、捕获绳索和捕获绳网,捕获连杆底部分别与所述第一扭转连杆、第一连杆、第二扭转连杆、第二连杆的第二端转动连接,多个所述旋转滑轮均通过轴承设置在所述捕获连杆上,所述捕获绳索通过在所述旋转滑轮上缠绕形成捕获绳网,所述捕获绳网形成初始捕获空间;通过所述捕获折展组件进行捕获折展,捕获空间扩大,折展完成后通过所述扭转收束组件进行扭转收束,捕获空间缩小,并将捕获目标置于捕获空间内部,实现捕获目标的捕获。
3、可优选的是,所述底架台、移动花盘、顶架台和扭转花盘为同轴设置,所述移动花盘和所述扭转花盘之间设置有中间台,所述底架台、中间台和所述顶架台之间通过多个支撑杆连接。
4、可优选的是,通过所述捕获折展组件中丝杠与丝杆电机的配合设置,将所述移动花盘的往复直线运动转化为所述折展连杆的折展运动。
5、可优选的是,所述第一扭转连杆与所述第一连杆、所述第二扭转连杆与所述第二连杆在捕获折展和收束中始终保持平行。
6、可优选的是,各所述捕获连杆呈圆周设置在所述扭转花盘四周,且各所述捕获连杆在捕获折展及收束中始终保持平行。
7、可优选的是,捕获机械手处于非工作状态时,所述移动花盘与所述底架台间的距离最近,所述扭转花盘与所述顶架台间的距离最近,所述捕获连杆收拢,整体机构处于收拢状态。
8、可优选的是,捕获机械手处于工作状态时,首先通过所述捕获收展组件进行捕获折展,所述扭转收束组件均处于非工作状态位置,所述移动花盘与所述底架台间的距离最远,所述捕获连杆展开,所述捕获绳网能够形成更大的捕获空间。
9、可优选的是,捕获机械手处于工作状态时,完成捕获的扭转收束,所述扭转花盘进行旋转,对处于捕获空间中的捕获目标进行包络捕获,直至完成捕获任务。
10、可优选的是,所述捕获绳网完成捕获收束后,主动给予绳网拉力,对捕获目标的收束形成二次变刚度,能够实现对不同捕获目标的变刚度变精度捕获。
11、本发明与现有技术相比,具有如下优点:
12、1.本发明扭转收束式空间柔性捕获机械手,捕获的折展和收束均通过电机驱动,易于控制,且扭转动作响应速度快,捕获效率高,捕获精度高,同时通过机构对目标进行二次变刚度捕获动作,实现对不同捕获目标的变刚度变精度捕获。
13、2.本发明扭转收束式空间柔性捕获机械手,通过刚性折展、扭转机构和柔性捕获绳网,通过刚柔耦合机械手进行捕获,具有顺应性强,容许捕获目标偏差大和稳定性高等优点。
14、3.本发明扭转收束式空间柔性捕获机械手,捕获折展组件和扭转收束组件能够在高真空和强辐射的环境下正常工作,解决了在太空错乱复杂的电磁辐射场中出现精度失真的问题,能够更好地实现空间目标的精确捕获。
技术特征:1.一种扭转收束式空间柔性捕获机械手,其特征在于,其包括捕获折展组件、扭转收束组件和绳索驱动组件,所述扭转收束组件位于所述捕获折展组件上方,所述扭转收束组件的扭转连杆与所述捕获折展组件的折展连杆转动连接,所述绳索驱动组件沿圆周等间距设置在所述扭转收束组件周侧,所述绳索驱动组件的捕获连杆与所述扭转收束组件的扭转连杆转动连接;
2.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,所述底架台、移动花盘、顶架台和扭转花盘为同轴设置,所述扭转花盘和所述移动花盘之间设置有中间台,所述底架台、中间台和顶架台间通过多个支撑柱连接。
3.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,通过所述捕获折展组件中丝杠与丝杆电机的配合设置,将所述移动花盘的往复直线运动转化为所述折展连杆的折展运动。
4.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,所述第一扭转连杆与所述第一连杆、所述第二扭转连杆与所述第二连杆在捕获折展和收束中始终保持平行。
5.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,各所述捕获连杆呈圆周设置在所述扭转花盘四周,且各所述捕获连杆在捕获折展和收束中始终保持平行。
6.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,捕获机械手处于非工作状态时,所述移动花盘与所述底架台间的距离最近,所述扭转花盘与所述顶架台间的距离最近,所述捕获连杆收拢,整体处于收拢状态。
7.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,捕获机械手处于工作状态时,首先通过所述捕获收展组件进行捕获折展,所述扭转收束组件均处于非工作状态位置,所述移动花盘与所述底架台间的距离最远,所述捕获连杆展开,所述捕获绳网能够形成更大的捕获空间。
8.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,捕获机械手处于工作状态时,完成捕获的扭转收束,所述扭转花盘进行旋转,对处于捕获空间中的捕获目标进行包络捕获,直至完成捕获任务。
9.根据权利要求1所述的扭转收束式空间柔性捕获机械手,其特征在于,所述捕获绳网完成捕获收束后,主动给予绳网拉力,对捕获目标的收束形成二次变刚度,能够实现对不同捕获目标的变刚度变精度捕获。
技术总结本发明提供一种扭转收束式空间柔性捕获机械手,涉及机械手技术领域,其包括捕获折展组件、扭转收束组件和绳索驱动组件,扭转收束组件位于捕获折展组件上方,扭转收束组件的扭转连杆与捕获折展组件的折展连杆转动连接,绳索驱动组件沿圆周等间距设置在扭转收束组件周侧,绳索驱动组件的捕获连杆与扭转收束组件的扭转连杆转动连接,本发明首先通过捕获折展组件进行捕获折展,折展完成后通过扭转收束组件进行扭转收束,并将捕获目标置于捕获空间内部,实现对不同捕获目标的变刚度变精度捕获,同时通过刚性折展、扭转机构与柔性捕获绳网配合,形成刚柔耦合机械手进行捕获,具有捕获效率和精度高、适应性强、容许捕获目标偏差大和稳定性高等优点。技术研发人员:韩博,刘晓涵,江源,刘枫,骆明炎,李明洋受保护的技术使用者:燕山大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50292.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种管件放置架的制作方法
下一篇
返回列表